研究人员已经开发出一套六边形的机器人组件,这些组件可以快速组装成越来越大的结构。每个六边形组件都是由用作外骨骼的刚性板制成的。在电力的驱动下,这些板可以改变形状,快速从狭长变宽变平。这种组合结构能够跳跃四倍于自身身高的高度,然后可以变形以极快的速度滚动,或者使用多模态驱动在狭窄的空间中爬行。
机器人组件是在马克斯-普朗克智能系统研究所(MPI-IS)开发的。这些模块由六块由玻璃纤维制成的轻质刚性板组成,形成六边形。嵌入板中的磁铁允许快速连接到其他组件,以及提供模块之间的共享电气接地。
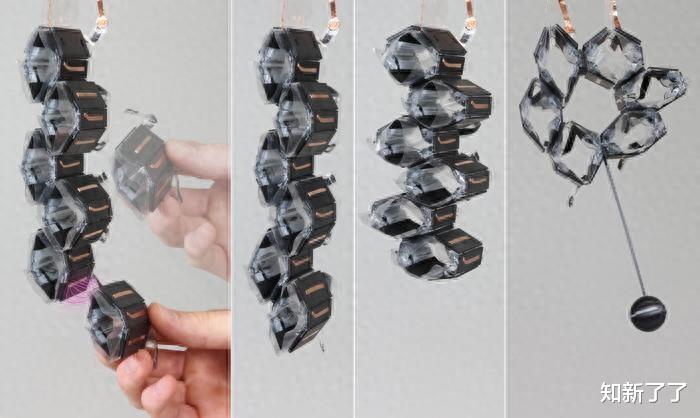
设计团队将人造“肌肉”整合到六边形的内部关节中,称为液压放大自愈静电(HASEL)肌肉。向模块施加高电压会使肌肉激活,旋转六边形的关节,将其形状从长而窄变为宽而平。

科罗拉多大学博尔德分校的访问研究员艾伦·拉姆利(Ellen Rumley)在MPI-IS的新闻发布会上说:“通过这种方式将软部件和刚性部件结合起来,可以实现高冲程和高速度。通过连接几个模块,我们可以创建新的机器人几何形状,并根据不断变化的需求对其进行重新调整。”拉姆利和扎卡里·约德(Zachary Yoder)都是机器人材料系的博士生,是发表在《科学机器人》杂志上的一篇新论文“用于快速可重构高速机器人的六角电液模块”的共同第一作者。
这些模块是可重新配置的,可以很容易地连接或分离模块。模块链可以快速连接,并可以从一个电压源运行。每个模块都可以有自己的行为,从而允许各种操作。
该团队制作了一个视频,展示了使用HEXEL模块可以创建的各种配置和行为。可以看到这些模块滚动、跳舞、跳跃、爬行和许多其他动作。
“总的来说,开发具有可重构能力的机器人是很有意义的,”约德说。“这是一个可持续的设计选择,而不是为五个不同的目的购买五个不同的机器人,我们可以使用相同的组件制造许多不同的机器人。由可重构模块制成的机器人可以根据需要重新排列,提供比专用系统更多的多功能性,这在资源有限的环境中可能是有益的。”
如果朋友么喜欢,敬请关注“知新了了”!
