昔日称霸车圈的智驾供应商Mobileye,近日宣布了一则重大决定——
今年内就要立刻关闭激光雷达研发部门,并且终止下一代激光雷达的研发工作!

抛弃激光雷达的原因,总结起来就是六个字:没必要,不挣钱。
Mobileye经过仔细评估过后,认为激光雷达对下一代智驾技术来说并没有那么重要;而且能省下每年6000万美元的研发成本,可以说是赢麻了。
无独有偶,2021年8月,Waymo宣布停止商业激光雷达业务;去年9月,博世也官宣放弃研发用于智驾的激光雷达……

激光雷达对于自动驾驶来说,到底是鸡肋还是必需?一直是个热门的争议话题。
“反对派”的代表人物,自然是世界首富马斯克。他曾多次公开diss:“只有傻子才会把激光雷达装在车上,这些自动驾驶公司都注定失败!”
马斯克这几年也确实没有动摇,FSD一直坚持纯视觉路线走到黑。不仅从来没用过激光雷达,甚至最近几年都把毫米波雷达给砍没了,能力上却越来越强。

除了特斯拉以外,搭载了百度Apollo智驾方案的极越,同样依靠纯视觉方案,就实现了城市领航辅助功能。
极越CEO夏一平,在最近也放出了类似的豪言:
“华为一定会放弃激光雷达转投视觉方案,只是余承东太狡猾。一边在宣传激光雷达方案,同时背地里也一直在砸钱开发纯视觉方案,等纯视觉成熟就无缝切换,一点空档都不留给其他对手。”

另一边,“支持派”的玩家也同样不少。包括小鹏、蔚来、理想、华为等等一线智驾玩家,纷纷选择了“摄像头视觉+雷达”的融合感知方案。
他们一致认为,激光雷达是实现高阶智驾最不可或缺的关键零部件。
比如极氪智能科技副总裁林金文表示:“不用激光雷达,是在为降本找理由!”

不过最近一段时间,风向开始出现了一些变化——
“端到端”技术浪潮来了!
随着今年特斯拉FSD推出了基于“端到端架构”的V12版本,删掉原本30万行C++代码,替换为3000行神经网络之后,系统决策准确度和执行速度都有了质的飞跃。
不依赖激光雷达、不依赖高精地图,仅仅依靠纯视觉都能把智驾做到如此流畅,难怪会让远赴美国试驾FSD的何小鹏都称赞不已。

回国之后,何小鹏曾多次承认“端到端”技术的优越性,建议友商们“别犹豫,赶紧改”。
紧接着,小鹏就对激光雷达“动刀”了!
在小鹏MONA M03发布会上,何小鹏表示将推出“AI鹰眼视觉方案”,不搭载激光雷达,摄像头精度、可视距离大幅升级,同样可以有能力实现城市领航辅助驾驶,预计今年四季度将首次搭载在新款小鹏P7+上。

要知道,4年前车企们在智驾上搞军备竞赛的时候,卷激光雷达是非常疯狂的。
长城机甲龙甚至放出了“四颗以下别说话”这种豪言,威马M7也干脆直接上了3颗激光雷达……
不过这两款车都最终没能落地就是了。

到现在来看,只有阿维塔采用了3颗激光雷达的方案,其他的车型要么是大灯周围的双激光雷达方案,要么是车顶“犄角”式的单激光雷达方案。
而最近成都车展前后亮相的几款新车型,比如问界M7 pro、深蓝S7乾崑智驾版等等,都开始向纯视觉智驾的方案上倾斜。
要知道,同一款车型带激光雷达与不带激光雷达的,价格差距基本上都在1-4万元不等。
于是这段时间,车圈出现了不少 “花高价买激光雷达的车主或将成大冤种”、“激光雷达割韭菜”的声音。

资本对于这种悲观的氛围是相当敏感的,导致今年下半年,禾赛、速腾聚创等等激光雷达公司的股价出现暴跌,市值缩水超过80%。

要知道,在2年多前,同样是在智驾圈子里,高精地图曾经也被誉为智驾路线上的“香饽饽”。
但随着一线智驾玩家为了突破智驾的使用范围,纷纷开发无图方案,高精地图沦为了被抛弃的对象。
这让图商四维图新一年爆亏了13亿,气得其CEO直接在公开场合Diss无图方案:“毫无安全敬畏!”

既然无图智驾抛弃了高精地图,那么问题来了:
端到端技术的普及,会让激光雷达也面临被抛弃的厄运吗?
对于这个问题,首先要看看目前激光雷达在智驾系统中的重要性如何。
其实有个比较简单粗暴的判断方法——故意把激光雷达遮住再去测智驾功能不就OK了?

网上能找到不少这么测试的案例。
有的车型中的一些智驾功能,即使遮住激光雷达影响也比较小,甚至察觉不出影响。
比如,去年有一位B站UP主录了一段视频,他把阿维塔上的3颗激光雷达都拿纸壳糊上,然后在路上摆放障碍物进行自动紧急避障测试。
结果发现,时速跑到120km/h自动避障只是出现了轻微延迟,功能并没有受到影响。

同样的,有人把问界M7的激光雷达遮住测AEB,也能顺利刹停。

把理想L8激光雷达遮住,会发现辅助驾驶仍然能正常开启,车道线识别和拨杆变道功能均可用。
但中控屏上会触发提示,激光雷达表面脏污,请及时清理,不能识别静止物体,和车辆、人以外的非标准物体。

但,也有遮住激光雷达影响比较大的。
在市面上首款搭载激光雷达的车型小鹏P5刚刚上市那段时间,我们公社也曾做过类似的测试。在测试跨楼层泊车功能时,故意把P5的激光雷达用A4纸拿双面胶糊上。
结果发现,只遮挡一颗激光雷达的时候,跨楼层泊车功能仍然可用,对于车位和行人的识别并没有受到影响,仍然可以丝滑的执行避让动作。
但两颗激光雷达都被遮挡时,就不能顺利执行避让和泊车动作了。

还有蔚来ET7,遮住激光雷达之后会显示辅助驾驶系统故障,无法激活。

不同的车型遮住激光雷达,却出现了不同的结果。
这说明,不同车型、不同智驾功能,对于激光雷达的依赖度都是不同的,有的优先级比较高,一旦遮挡就无法启用;有的则优先级较低,不会影响功能使用。
总体上来说,目前激光雷达在智驾系统中扮演的角色,更多的是为了安全冗余考量。
但鉴于目前大多数融合感知智驾,采用的都是传统的BEV鸟瞰图+OCC占用网络+Transformer大模型的架构,而并没有完全切换到公认更前沿的“端到端”架构。
所以要讨论激光雷达会不会被抛弃,还要看要看它与端到端架构的兼容度如何。

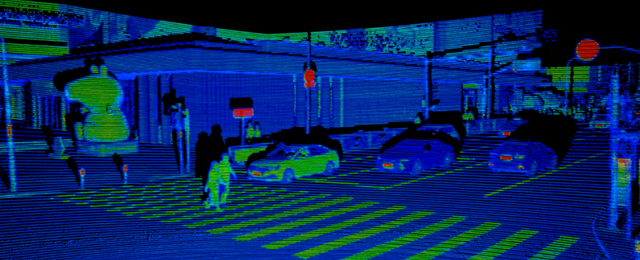
首先,目前传统的智驾架构逻辑,本质上就是将视觉图像做2D转3D,实时建立高精地图。
如果有激光雷达的话,就可以通过扫描物体轮廓,将扫描出来的周围环境更清晰和准确。
不过,端到端架构完全是另一个路子!
端到端智驾不需要做2D转3D,直接根据图像输出加减速信号和转向幅度,流程上大幅简化,响应速度更快,更接近人类开车的方式。
但相对的,就需要投喂大量图像与驾驶操作的对应关系数据,才能让端到端模型的决策变得更准确。
对端到端技术感兴趣的朋友,可以再回顾一下这篇:太疯狂了!特斯拉删除99%代码,FSD却更好用了!智驾的终极答案竟然是它?

简单来说就是,传统智驾靠的是感知信号与算法堆叠下的缜密逻辑,而端到端靠的是类似“肌肉记忆”的经验。
这也是为什么,有不少人认为端到端时代,激光雷达就不再那么重要了。
理由是,端到端智驾是在模仿人类的驾驶行为,本质上就是视觉感知下的经验判断,而激光雷达用的是多普勒效应,跟人类驾驶行为不搭边,所以激光雷达信号无法融入到端到端模型之中。

个人认为这种说法有些欠妥,因为即使是激光雷达作为感知信号源,也能找到与加减速转向等数据的对应关系。
将激光雷达信号加入端到端大模型的训练,实际是可行的。
但存在两个难点需要克服:
一是目前市面上带激光雷达的车相对较少,导致可供端到端训练用的激光雷达信号非常有限;
二是加入激光雷达信号意味着变量的增加,这对于整车乃至云端训练算力的需求,将会指数级增加,以现在的硬件水平未必能hold住。
换句话来说,基于纯视觉的端到端架构,真的是未来智驾的终极答案吗?我看未必。
端到端是通过人类经验行为训练出来的,那么它理论上的能力极限,会无限接近于人类极限,但很难做到超越人类驾驶。
更何况,一旦雨雾等条件下便很难发挥作用,因此纯视觉端到端更像是为L2级自动驾驶服务的。
想要达到“人机共驾”L3,以及“无人驾驶”L4,必须要有更深层次的安全冗余,这时激光雷达的价值就体现出来了。
举个例子,有个词叫“空间感”,指的是人对于自身所处方位,与其他物体距离判断的能力。

有的人空间感强,有的人空间感弱。
但即使空间感再强的人,也很难直接通过视觉效果,用近大远小和透视关系精确推断出前车距离自己到底有多远。就算“我的眼睛就是尺”的王濛来了,也精确不到毫米级。
这也是为什么,早年间特斯拉出过很多起,因为识别不出静止的白色大货车而撞车的事故的原因之一。
但激光雷达不一样,可以通过激光反射及频率,测得非常准确的距离数值,达到厘米级甚至毫米级是可以实现的。
远高于摄像头感知的精确性,恰恰就是激光雷达不可或缺的关键。

写在最后
在当下这个时间节点,“纯视觉VS激光雷达”再次成为争论的话题,并不是因为激光雷达没有未来,而是因为现在的激光雷达还不够强。
就拿像素来个举例子——
问界M9上搭载的华为192线激光雷达,折合约为210万像素,而前置摄像头为800万像素。
目前,激光雷达的像素普遍不及摄像头。像素低了,扫描模型就会变“糊”,影响信息传递的准确性。
除此之外,激光雷达探测距离、扫描频率、抗环境干扰能力、体积、功耗等方面,还有许多优化空间。

再有就是对车企来说无比重要的:成本。
虽然近几年激光雷达降本非常迅速,从动辄5万元一颗到后来的2万元左右,到现在一颗在5000元左右,已经到了车企和用户都能支付得起的地步。
但跟数百元价位的摄像头相比,降本空间还很大。
几年前,车载激光雷达市场几乎完全被外资企业垄断,而最近几年,禾赛、速腾聚创等国产激光雷达已经在悄然间崛起,已经将占据了90%以上的市场份额。

与此同时,国产激光雷达厂商们的研发脚步,并未停滞不前,而是在自身所处的产业链细分领域中,不断探索着智驾的终极答案。
智驾的终极答案究竟为何物?我们未曾可知。
但可预见的是,我们会努力成为第一个得到答案的人。
