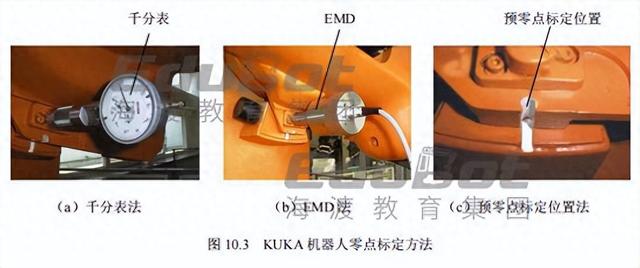
KUKA 机器人零点标定有 3 种方法:千分表法、EMD 法和预零点标定位置法,如图10.3 所示。本章以使用 EMD 和使用预零点标定位置为例,说明零点标定操作步骤。
使用 EMD 进行零点标定
完整的零点标定过程包括为每一个轴标定零点。技术辅助工具EMD(Electronic Mastering Device,即电子控制仪,如图 10.4 所示)可为任何一根轴在机械零点位置指定一个基准值(例如:0°),使轴的机械位置和电气位置保持一致。

使用 EMD 标定零点流程:机器人每根轴都配有一个零点标定测量套筒和一个零点标定标记,通过手动操作机器人运动,直至达到机械零点位置,使得探针到达轴相应测量槽的最深点,如图 10.5 所示。

使用 EDM 校准的操作步骤见表 10.2。






使用预零点标定位置进行标定
使用预零点标定位置的标定方法,只能很粗略的进行机器人零点标定,标定完成后的位置与实际位置有很大差异。在机器人实际使用过程中建议使用 EMD 标定方法进行标定。
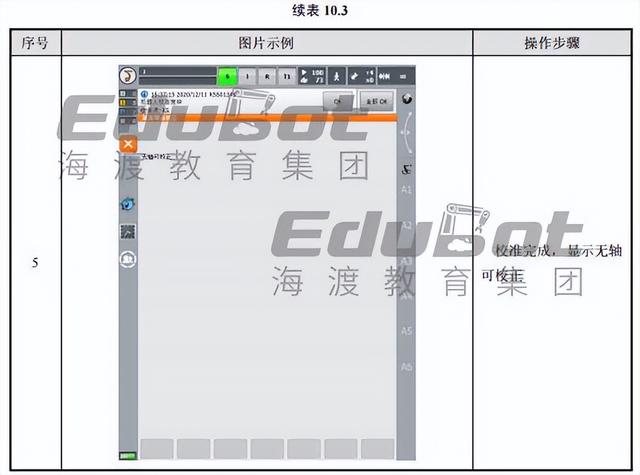
使用预零点标定位置的标定方法具体步骤见表 10.3。


【版权声明】本系列课程所有文字、图片和音视频资料,版权均属海渡教育集团所有,任何媒体、网站或个人未经海渡教育集团协议授权不得转载、链接、转贴或以其他方式复制发布/发表。已经海渡教育集团协议授权的媒体、网站,在下载使用时必须在醒目位置注明"课程来源:海渡教育集团",违者我司将依法追究责任。更多内容可下载海渡职校APP进行学习。
