文章由上海理涛自动化科技有限公司提供
一、描述
本试验的目的是确定机器人可以正常行进通过的低矮通道的最低高度。
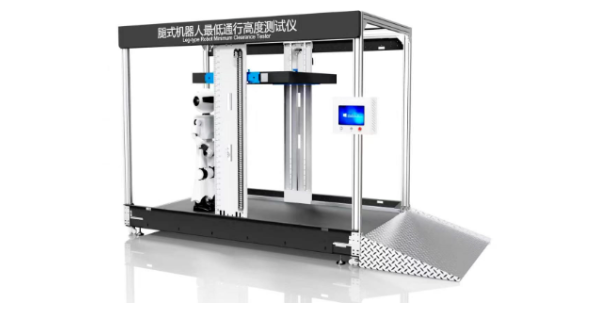
严格遵循GB/T 44251-2024第17条
四,应用领域
产品研发场景用于双足人形、四足巡检、多足救援等各类腿式机器人的结构优化、算法迭代,解决传统试验无标准场地、数据主观性强、不同机型无法横向对比的痛点,助力样机性能对标与快速迭代。
出厂质检场景可实现机器人最低通行性能的全流程质量管控,保障量产产品的通行能力一致性与稳定性,避免批量性性能缺陷。
合规性检测场景测试数据可直接作为第三方检测机构、行业认证的标准化判定依据,满足GB/T 44251-2024规定的合规性检测要求。
科研教学场景适配高校机器人科研平台,为腿式机器人空间通行能力的相关课题研究提供可复现、可量化的标准化测试支撑。
每次试验应按以下步骤进行。
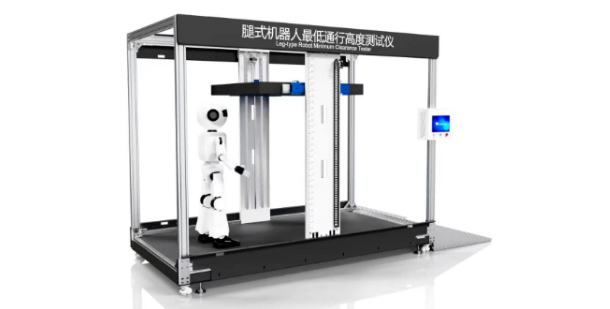
a) 机器人除自身外无其他负载,放置在长方形空洞前并保持稳定站立姿态,长度测量设备测得长方形空洞的宽度为W,长度为C。
b)机器人开始行进并跨越空洞至另一侧(跨越采取的运动方式不限),跨越后停止行进并保持稳定站立姿态。
c)增大长方形空洞长度C并重复a)、b)直至被测机器人无法完成这些步骤为止,完成一次试验。
六,发货清单
主机1台;
说明书1份;
合格证1份;
保修卡1份;
签收单1份;
铭牌1块;
电源线1根;
扳手1套;
宣传册若干;