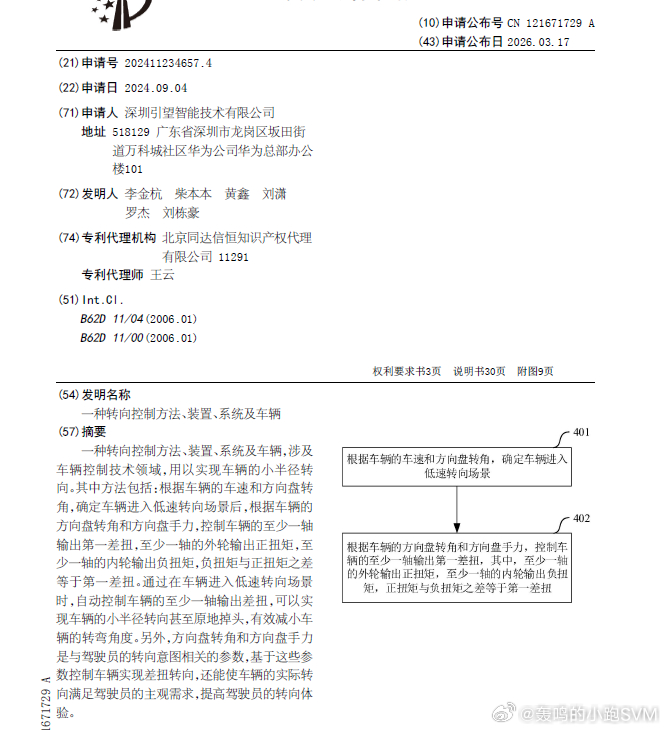
技术巡猎 引望 一种转向控制方法、装置、系统及车辆---啧啧啧,华为版本的易三方。这份专利的方向,就是如何通过差扭控制,去缩小转弯半径,进而将低速时的“拐弯能力”往前推一步。
普通人可以这么理解,以前一台车的转向半径极限主要是看前轮打多少、轴距多长、后轮有没有跟着转,更多是机械能力决定上限。但就电车来说,左右轮的扭矩是可以被精细控制的,于是车的转向,不仅仅是“车轮指哪儿打哪儿”,还可以靠左右轮不同的推力,让整车产生横摆趋势,将车身“拧”进弯里,这就是差扭转向的基本含义。
但只靠差扭也不是没有问题。扭矩给多了,车确实可以更快地转过去,可轮胎、车身姿态、驾驶员手感,未必是舒服的。这份专利的亮点也就在这,简单粗暴地让左右轮干出一个扭矩差并不好玩,需要先判断你是不是处在真正需要“小半径拐弯”的场景里。其中设了两个很关键的入口条件:一是车速足够低,二是方向盘已经打得比较大。
专利举了一个例子,第一车速可以是10km/h,第一转角可以是400°。也就是说,你在正常开路上轻微修方向,它不会介入;但当你慢下来之后,而且方向打得很深以后,它就知道你大概率不是在走直角弯了,而是在处理窄空间了。
它也不只看方向盘打了多少,还看你打方向时“用了多大力”。这其实是人和车之间的一种默契。方向盘角度能说明你在转弯,但方向盘手力能更接近你的主观意图。比如同样是大角度打轮,有的人是慢慢转,但有些时候,狭窄路口着急想一把掉头,你是拧得特别用力的---这两种意图其实不一样。专利里也考虑了方向盘的“力”,总之方向盘转角和方向盘手力都和驾驶员转向意图相关,系统会结合这两个量来控制至少一轴输出差扭。
先根据方向盘转角,算出一个“理想转弯半径”;这个理想值是从传统车辆运动学出发的,按阿克曼转向几何做的计算,相当于先拿到了一个比较规矩、不乱来的几何转弯目标。然后再结合车速、方向盘转角和方向盘手力,算一个“转向修正系数”,把这个理想半径进一步缩小,变成目标转弯半径。转向修正系数越大,目标半径就越小,小半径转向的力度也就越强。
高车速、小方向盘角度、轻手力的时候,修正系数可以降到0,也就是不加额外转向辅助;低车速、大方向盘角度、重手力的时候,修正系数可以拉到1,系统给到最大的辅助增益;中间区域就渐进变化。这个思路我觉得是对的,因为低速灵活和高速稳定,从来就不是一回事。“更小半径转向”容易让人兴奋,但工程上第一原则还是“稳定第一”。把功能边界卡在低速、大角度、明确意图这几个条件里,是在日常体验里落地的基础。
系统会把目标转弯半径换算成目标横摆角速度,再根据车辆实际横摆角速度和目标值之间的偏差,去算需要补多少附加横摆力矩,最后把这个力矩分解成左右轮差扭输出。也就是说,先明确“应该怎么转”,再盯着“现在有没有按这个方向在转”,不够就补,多了就收紧。
几个典型场景,比如侧方出库起步、窄路掉头、越野土路低速过弯、冰雪低速过弯,差扭控制的用途都很真实。
也考虑了横纵向解耦,如果驾驶员请求的扭矩发生变化,被动轴会去响应这个变化,而主动轴更多负责差扭和横摆控制。这个思路很好理解,一边在执行更小半径转向,一边又让同一套执行链路同时承担加减速主任务,是不太好的,容易互相拉扯,把横向和纵向尽量拆开,才是成熟底盘控制的做法。
电驱时代的底盘能力开始从机械件能力,变成“机械基础 + 电机执行 + 控制算法 + 人机意图识别”的体系能力了。以前大家聊转弯半径,更多是车身尺寸和转向机几何;以后啊……
以后,嗯,我觉得,它是豪华级的必备要素,没问题吧?


![阿维塔的董事长。给某人介绍阿维塔大换代,是和华为合作的896线激光雷达[捂脸哭][](http://image.uczzd.cn/14121756914470736729.jpg?id=0)