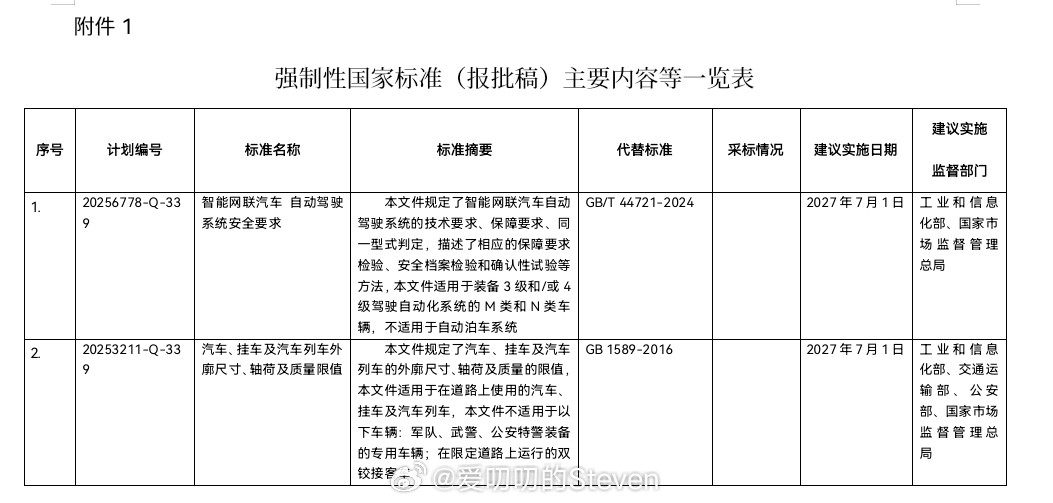
L3/L4自动驾驶强制国标报批稿一公示,有传言就开始讲"L3必须摄像头+毫米波双冗余,L4必须上激光雷达"
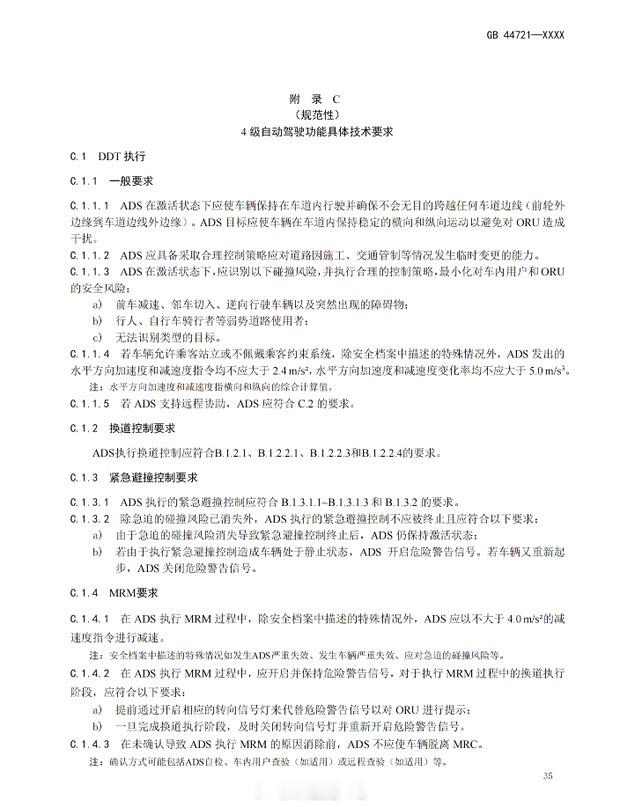
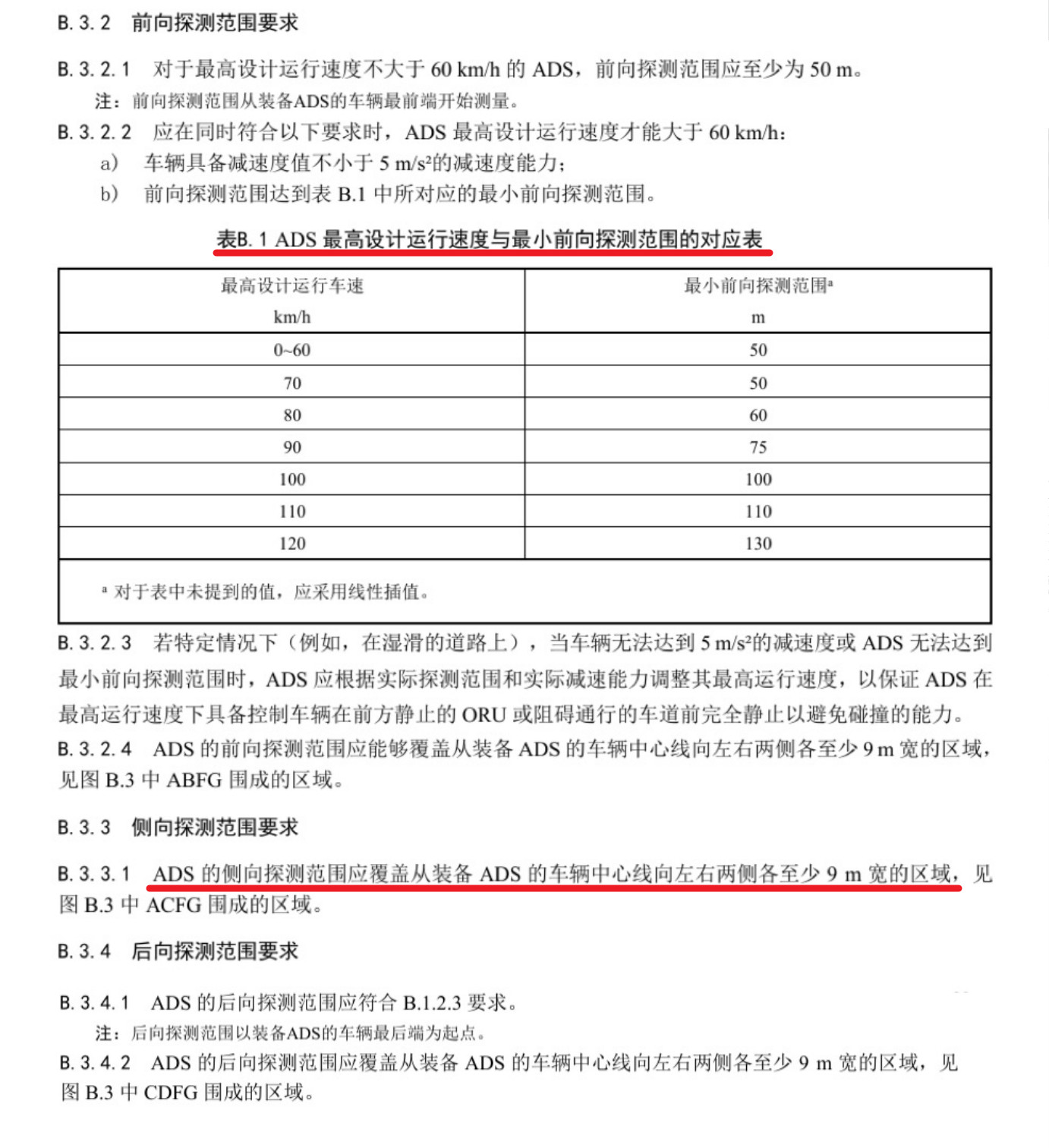
《自动驾驶系统安全要求》是结果导向的,围绕很多功能要求和测试要求展开的,它要求的是"能可靠探测目标、应对性能衰退、在各种场景下执行动态驾驶任务",但用什么传感器实现,企业自己选,跟电池安全国标不规定用三元还是铁锂是一个指导原则,只看安全水平
所以"L3必须装毫米波、L4必须装激光雷达"这个表述,如果你把它当成法规原文,是错的。标准没有禁止纯视觉。国标要求感知系统能应对性能衰退、极端天气、共模失效,从这个意义上来看,毫米波雷达和激光雷达在感知层面提供了异构冗余。
《标准》明确提出,ADS(自动驾驶系统 Automated Driving System)的安全水平应至少达到“合格且专注驾驶人”的水平,不得对用户及其他道路使用者构成不合理安全风险,并需在激活状态下执行全部动态驾驶任务,同时识别是否处于设计运行条件(ODC)内。车企不再只用“测试跑了多少公里”“覆盖多少城市”“模型参数更大”来证明系统能力,更需要说明这些能力是在什么条件下实现、如何验证及在失效情况下如何控制风险。
《标准》引入Safety Case(安全档案)机制,企业以“声明—论据—证据”的结构对自动驾驶系统的安全性进行系统论证,系统在设计运行条件下的能力边界,还需给出支撑其安全性的逻辑依据与试验数据。将仿真、场地与道路测试纳入统一验证框架,要求多源测试结果在场景覆盖与验证深度上共同支撑安全声明,并对仿真工具链与实车测试结果的一致性进行验证,从而形成可闭环、可追溯的安全论证体系。
我觉得现在不是讲激光雷达,芯片算力和内存带宽,甚至是大模型的事情,这次标准确实做的比较扎实,要推动L3和L4的前进,事实上L4 低速物流配送可能这几年跑得很快,轮子上的移动机器人要转起来了,法规层面真不是讲个激光雷达的事情