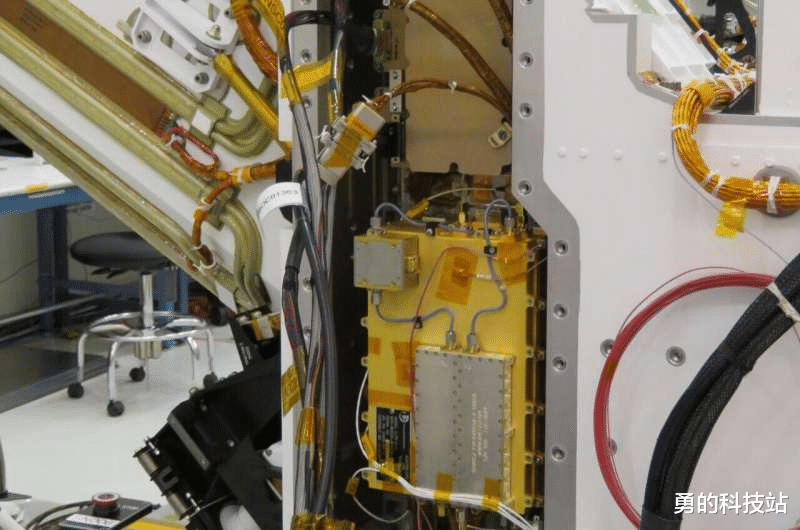
火星全球定位算法运行在直升机基站的快速商用处理器上——该上方的金色盒子被集成在NASA的“毅力号”探测车无尘室中。毅力号利用基站与现已退役的“机智”火星直升机通信。图片来源:NASA/喷气推进实验室-加州理工学院
想象你独自一人,驾车穿行在崎岖、无路、无图、无 GPS 的沙漠中,唯一能知道你所在位置的方式是每天只能接一次电话。
这正是 NASA 的“毅力号”着陆火星五年以来所经历的境况。虽然它配备了经久检验的定位工具,但仍需地球上的操作员精准告诉它位置——直到最近。
新技术让毅力号“自我定位”美国加利福尼亚州南部喷气推进实验室(JPL)研发出一项名为“火星全局定位(Mars Global Localization)”的新技术,使毅力号无需向人类求助即可确定自己的位置。该技术采用一种算法,能够迅速将毅力号导航摄像机拍摄的全景图与机载的火星表面地图进行比对。运行在原本用于与 Ingenuity 火星直升机通信的强大处理器上,算法大约需要两分钟即可将车辆定位到 10 英寸(25 厘米)以内。火星全局定位于 2 月 2 日首次成功用于常规任务操作,随后又在 2 月 16 日再次验证。
“这有点像给火星车装上 GPS。现在它能自己确定在火星上的位置,”JPL 机器人运营主管 Vandi Verma 说道。“这意味着火星车可以在更长的距离上自主行驶,从而探索更多地区、获取更多科学数据。几乎所有其他快速远程行驶的火星车都能使用这项技术。”
该升级尤其重要,因为毅力号的自动导航系统(AutoNav)已能在前往预设目标的途中重新规划路径、绕开障碍。AutoNav 的表现如此出色,以至于火星车在无需地球指令的情况下可行驶的距离,主要受限于它对自身位置的不确定性。如今,当它能停下来精确定位自身后,毅力号就能被命令驶向几乎无限的距离,而不必再次联系地球。
火星全局定位的实现紧随毅力号团队的另一项创新:首次使用生成式人工智能为火星车规划行驶路线,选择通常由人类操作员挑选的路径点。两项技术均能让毅力号行驶更远、更快,同时减轻团队工作负荷。
超越视觉里程计在地球上,有 GPS 卫星网络可以定位飞船,但在深空中,火星表面并无此类网络。因此,无论是机器人还是载人任务,都必须找出其他定位方式。
与 NASA 以往的火星车类似,毅力号使用视觉里程计(visual odometry)跟踪自身位置:分析摄像机每隔几英尺拍摄的地质特征,同时考虑轮胎打滑。随着行驶过程中的细小误差累积,火星车对自身位置的认知会越来越不确定。在长途行驶中,火星车的定位误差可能超过 100 英尺(约 35 米)。它可能误认为自己离危险地形太近,从而提前结束行驶并等待地球指令。
“人类必须告诉它,‘你没迷路,安全。继续前进。’” Verma 说。“我们知道,只要解决这个问题,火星车每天都能行驶更远。”
火星全局定位的工作原理火星全局定位的核心是使毅力号在每次行驶停止后,利用机载算法将其拍摄的 360 度全景图与火星重定位轨道器(MRO)的图像进行匹配,进而自我定位并继续预定路线。
在每次行驶结束后,火星车会将全景图发送至地球,地图专家将其与 MRO 的图像比对,随后给火星车返回位置和下一步行驶指令。这个过程可能需要一天甚至更久,但借助火星全局定位,火星车即可自行比较图像、确定位置,并沿预定路线继续前进。
“我们赋予火星车一项新的能力,” JPL 机器人工程师 Jeremy Nash(该项目团队负责人)说。“这在机器人研究中已是数十年来的开放难题,能够在太空首次部署此方案极具意义。”
小团队从三年前开始工作,利用 264 次前次停靠点的数据测试算法准确性。算法将火星车的全景照片与 MRO 图像对比,并在每一次停靠点都能准确定位。
直升机基站(HBS)的关键作用火星全局定位的关键是火星车的直升机基站(HBS),这正是毅力号与已退役的 Ingenuity 火星直升机通信所使用的。HBS 配备了当年 2010 年代中期消费类智能手机所用的商业处理器,速度比火星车的两台主机快 100 倍以上。主机采用 1997 年引入的硬件,以抵御火星高辐射环境。
“这就像是一份礼物。Ingenuity 先行示范了我们可以在火星上使用商业处理器。” Verma 说。
使用 HBS 处理器虽然带来潜在收益,但也带来可靠性挑战。团队开发了“健全性检查”机制:算法在 HBS 上多次运行,随后由火星车的主机检查结果是否一致。测试期间,团队多次发现火星车的位置偏差只有 1 毫米,且发现约 25 位元损坏——这仅是 HBS 1GB 内存的一小部分。为此,团队开发了解决方案,隔离这些损坏位元,确保算法安全运行。
随着更快的商业处理器被未来任务采用,团队的健全性检查和内存解决方案预计将发现更多新用途。与此同时,团队已将视野转向月球,那里严苛的光照条件与漫长寒冷的月夜让精确定位显得尤为关键。
勇编撰自"NASA".2026相关信息,文中配图若未特别标注出处,均来源于自绘或公开图库。