无人机风墙本质是模块化风机阵列 + 闭环智能控制系统,通过人工合成可控、可复现的均匀风场,分为造风测试、稳风护航、逆风反制三种工作逻辑。
一、核心硬件基础
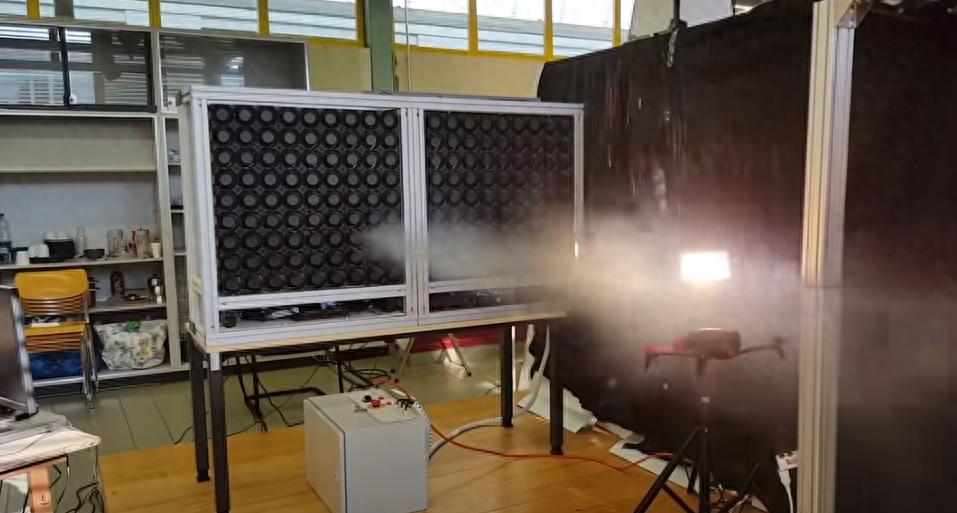
多台独立变频风机矩阵排布,每台可单独调转速、启停;
前端蜂窝整流网、导流格栅,用来消除涡流、乱流;
高精度风速 / 风向传感器 + PLC 中控系统 + 上位机控制软件。
二、基础通用工作流程
参数设定
后台输入目标参数:风速、风向、湍流强度、阵风频率、风切变模式。
风场拆解分配
控制系统将整体风场需求,拆解为每一台风机的转速、出力、工作时序。
阵列组合出风
多风机协同配合,横向 / 纵向叠加气流,合成定向、匀速的稳定气流。
整流优化
气流经过蜂窝整流结构,打散漩涡、平衡压差,形成均匀层流风。
闭环实时修正
传感器实时采集现场真实风速,和设定值对比,动态微调风机转速,持续纠偏,保证风场精准稳定。
三、三类风墙差异化原理
测试模拟风墙(主流)
主动人造强风,通过风机变速组合,模拟常态风、阵风、乱流、峡谷风、风切变,用来检测无人机抗风极限、飞控稳定性、结构强度。
起降稳风风墙(作业端)
反向抵消自然风,检测户外自然侧风、阵风,输出反向对冲气流,中和环境风,让起降区域保持低风速稳态,保障配送 / 巡检无人机安全起降。
安防反制风墙
定向聚焦集中高风速,形成高压风幕,强行扰乱黑飞无人机气动布局、姿态平衡,无电磁干扰,物理驱离、迫降违规飞行器。
四、特殊风况模拟原理
阵风:风机快速升降速,模拟间歇大风;
乱流 / 湍流:各组风机无序错峰出力,复刻复杂野外乱流;
多角度侧风:左右分区风机差异化控速,实现 360° 任意风向。
科翔试验设备KXT系统无人机试验设备客户有:大疆、中汽研、福建电科院、广东质检院、江苏质检院等。