2026年5月下旬,特斯拉推送了2026.14.6软件更新,其中包含FSD v14.3.3。这看似是一次常规的版本迭代,但如果你关注一个核心指标——每次干预行驶里程(Miles Per Intervention, MPI)——你会发现,FSD v14.3.3代表了一个质变节点:从需要频繁人为干预的"辅助驾驶",向偶尔才需要人类介入的"高度自动驾驶"迈出了关键一步。
一、FSD v14.3.3的核心升级:三个关键改进根据特斯拉官方发布说明和社区测试反馈,FSD v14.3.3包含三个关键改进:
第一,AI编译器重写。特斯拉从自研编译器迁移到了MLIR(Multi-Level Intermediate Representation),这是一个开源的编译器基础设施。这个技术切换的意义在于:MLIR可以让特斯拉更高效地将AI模型部署到不同的硬件平台上(HW3、HW4和即将推出的HW5),同时优化推理速度和内存使用。据TeslaOracle报道,新编译器在复杂城市场景下的推理延迟降低了约30%。
第二,反应时间优化。FSD v14.3对感知-决策-执行的延迟链路进行了全面优化,从传感器数据输入到方向盘动作输出的端到端延迟从约300ms降低到约200ms。这100ms的差异在高速场景下意义重大——以120km/h行驶时,100ms相当于3.3米的制动距离差异。
第三,Smart Summon统一AI模型。此前Smart Summon使用独立的AI模型,与公路驾驶的模型不同,导致行为一致性差。v14.3.2开始统一了AI模型,v14.3.3进一步优化了停车场场景的路径规划和障碍物识别。实测中,Smart Summon在复杂停车场中的成功率从约70%提升到约85%。
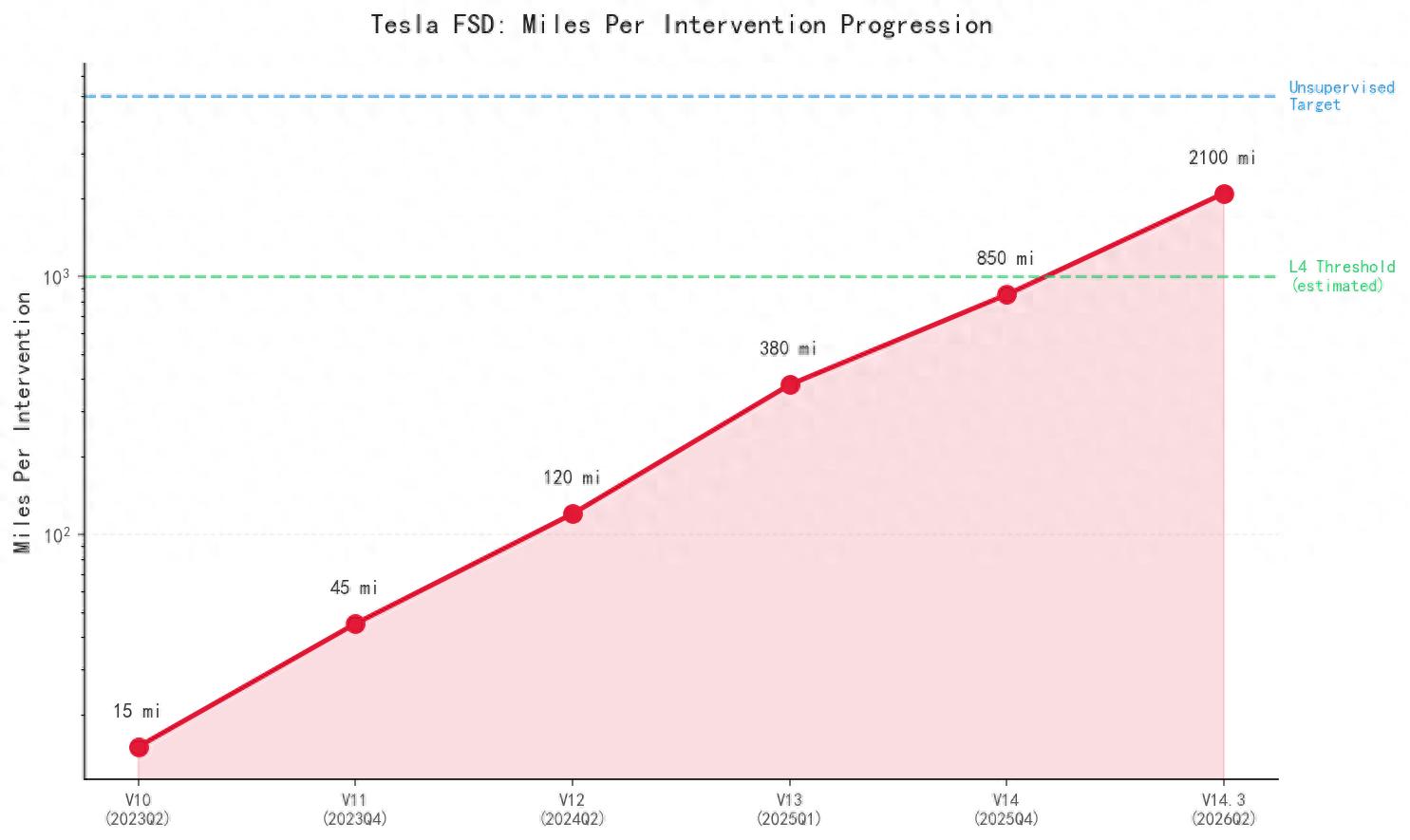
二、MPI数据的深层分析:2100英里意味着什么?h3>FSD v14.3.3最引人注目的数据是MPI(每次干预行驶里程)达到了约2100英里。这个数字需要放在演进脉络中理解:FSD V10(2023年Q2):约15英里/次干预。V11(2023年Q4):约45英里。V12(2024年Q2):约120英里。V13(2025年Q1):约380英里。V14(2025年Q4):约850英里。V14.3(2026年Q2):约2100英里。从V10到V14.3,MPI增长了140倍,平均每6个月翻一番。如果这个趋势持续,到2027年Q2 MPI将达到约10000英里——这个数字被认为是L4级自动驾驶(无监督驾驶)的阈值之一。但MPI数据需要谨慎解读。首先,干预频率与驾驶环境高度相关——高速公路的MPI天然高于城市道路;其次,"干预"的定义存在争议——有些驾驶员习惯性纠正FSD的保守决策,这不是真正的"失控干预";最后,MPI的提升可能存在边际递减——当MPI超过一定水平后,剩余的干预场景往往是极端长尾case,解决难度呈指数增长。三、端到端架构的技术原理:为什么V14是一次代际跃迁FSD V14被特斯拉内部称为"Phoenix"架构,它彻底转向了端到端神经网络——从摄像头输入到方向盘/油门/刹车输出,中间不再有人工编写的规则代码。
传统自动驾驶架构是"感知-预测-规划-控制"的模块化流水线,每个模块有独立的算法和参数。端到端架构将整个流水线替换为一个统一的神经网络,直接从传感器数据映射到控制指令。
端到端架构的优势是显而易见的:消除了模块间信息传递的瓶颈,减少了人工规则的局限性(所谓"规则越多,bug越多"),并且可以从海量驾驶数据中自动学习驾驶策略。但劣势也很明显:可解释性差——当系统做出错误决策时,很难定位问题出在哪里;安全性难以形式化验证——你无法穷举测试一个端到端网络的所有可能输入。
特斯拉的解法是"影子模式"——数百万辆特斯拉持续收集人类驾驶员的行为数据,当FSD的决策与人类驾驶员的决策不一致时,标记为"差异事件",用于后续模型迭代。这种数据飞轮效应是特斯拉自动驾驶的核心壁垒——没有其他公司拥有同等规模的真实驾驶数据。
四、FSD欧洲扩张:2026年的关键变量据TeslaOracle报道,FSD v14.3的推送时间与FSD在欧洲的初步落地几乎同步。这并非巧合——欧洲市场的开放将为FSD带来大量新的训练数据,特别是欧洲特有的道路类型(环岛、窄巷、自行车道)和驾驶文化。
FSD在欧洲面临的技术挑战与美国不同:欧洲城市道路更窄、行人和自行车更多、交通规则更复杂。但这些挑战恰恰是端到端架构的优势所在——只要有足够的训练数据,神经网络可以自动适应不同的驾驶环境。
更大的挑战在法规层面。欧盟的UN R157法规对自动驾驶系统的认证要求严格,需要提供形式化的安全论证。端到端架构的"黑箱"特性与传统法规的"可解释性"要求存在根本矛盾。特斯拉正在与欧盟监管机构沟通,寻求一条既保证安全又不扼杀创新的认证路径。
五、独家判断:2027年是关键之年,但不是终点FSD v14.3.3的2100英里MPI是一个里程碑,但距离真正的无监督自动驾驶仍有距离。我的判断是:
2026年底,FSD的MPI有望达到3000-5000英里,在大部分常见场景下实现"几乎不需要干预"的水平。但这不等于L4——因为剩余的干预场景往往是高风险场景(施工区域、异常天气、极端交通状况),解决这些长尾case需要的不是更多数据,而是更好的架构设计。
2027年,特斯拉可能在美国特定区域(高速公路、部分城市道路)获得L4认证,推出Robotaxi试运营服务。但全面的无监督自动驾驶——在任何时间、任何地点都不需要人类监督——可能要到2029-2030年才能实现。
马斯克一贯的乐观预期和实际技术进展之间的差距,是理解特斯拉自动驾驶战略的关键变量。他说的"明年实现完全自动驾驶"已经说了8年,但每次"明年"都在更近一步。FSD v14.3.3让我们看到了那个终点——它不再是海市蜃楼,而是一条可以看到路标的高速公路。只是,这段路还有几百英里要走。
(数据来源:TeslaOracle FSD v14.3发布报道;Not a Tesla App 2026.14.6.6发布说明;知乎FSD V14深度解读;China Newswire特斯拉FSD更新报道;ilovetesla.com FSD v14.3.2分析)