工业自动化领域,运动控制器就像是机械设备的大脑,而上位机软件则是操作人员与这个大脑沟通的桥梁。很多时候,我们手头有了高性能的控制器硬件,却苦于没有一套趁手的软件来指挥它。
本文推荐基于ZMC308B控制器开发的一套WinForm上位机系统。它不仅仅是一个简单的控制工具,更是一个涵盖了从底层通信到上层交互的完整解决方案。对于正在学习C,这是一个非常扎实的参考案例。
项目介绍项目本质上是一个基于.NET Framework 4.8开发的Windows窗体应用程序。它的核心任务是替代传统的示教器或复杂的命令行,通过图形化界面来管理ZMC运动控制器。
系统底层通过调用厂商提供的动态链接库,实现了PC与控制器之间的高速以太网通信。
整个项目的设计思路非常清晰:把复杂的运动控制指令封装成直观的按钮和输入框。用户不需要了解底层的寄存器操作,只需要在界面上输入目标位置、设定速度,点击启动,控制器就能精准执行。
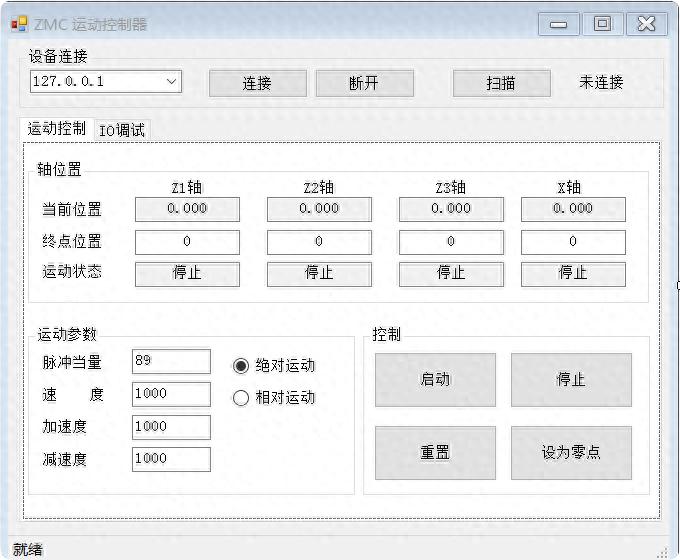
它支持四轴控制,涵盖了绝对运动和相对运动两种最常用的模式,非常适合用于点胶机、切割机或者多轴机械臂的调试与控制。
项目功能1、设备连接与管理
支持通过以太网连接ZMC控制器,可自动扫描局域网内的设备IP地址,实现一键连接与断开,连接状态实时显示。
2、四轴运动控制
支持Z1、Z2、Z3、X四个轴的独立控制,可分别设置各轴的目标位置,实现精准的单轴运动。
3、运动模式切换
提供绝对运动与相对运动两种模式,绝对运动可让轴移动到指定绝对坐标,相对运动可实现从当前位置的增量移动。
4、运动参数配置
支持自定义设置单位(脉冲当量)、速度、加速度、减速度等关键运动参数,满足不同工况需求。
5、实时位置监控
通过定时器实时更新各轴当前位置,在界面直观显示,方便用户随时掌握设备运行状态。
6、紧急停止控制
设置独立急停按钮,点击后可立即停止所有轴的运动,保障设备与人员安全。
7、位置校准管理
具备清零功能,可将所有轴归零到机械原点;支持设为零点功能,将当前位置设置为新的参考零点。
项目特点交互简洁直观界面布局清晰,将连接、参数设置、轴控制等功能分区明确,操作逻辑简单,新手可快速上手。
通信稳定可靠基于以太网通信,配合底层DLL封装,实现PC与控制器的高效数据交互,连接状态可实时检测。
代码结构清晰采用分层设计思想,将底层DLL接口封装与UI逻辑分离,便于后续维护与功能扩展。
安全机制完善除急停功能外,运动参数设置合理范围限制,避免异常参数导致的设备故障,贴合工业现场安全需求。
适配性强基于.NET Framework 4.8开发,兼容Windows 7及以上操作系统,对硬件要求低,部署方便。
扩展空间充足核心功能模块化,可在此基础上轻松增加多轴插补、运动轨迹规划、日志记录等扩展功能。
项目技术硬件要求Windows 操作系统(Windows 7 或更高版本)
ZMC 运动控制器
网络接口卡(RJ45)
与控制器通信的网线
软件要求.NET Framework 4.8 或更高版本
zauxdll.dll 和 zmotion.dll 驱动文件
Visual Studio 2019 或更高版本(用于编译开发)
核心类说明ZmcDll 类
封装 ZMC 控制器底层 DLL 接口,提供:
连接管理:OpenEth, Close, IsConnected
设备扫描:SearchEthList
位置控制:GetDpos, SetDpos
参数设置:SetUnits, SetSpeed, SetAccel, SetDecel
运动控制:SingleMoveRel, SingleMoveAbs
紧急停止:Rapidstop
Form 类主窗体类,实现用户界面交互逻辑:
事件处理:按钮点击、单选框切换、定时器事件
状态管理:连接状态、运动状态、位置监控
参数验证:输入合法性检查、异常处理
项目效果在实际运行中,这套系统的表现非常流畅。当你点击扫描按钮,几秒钟内就能列出网络中的设备IP。连接成功后,界面上的当前位置显示框会以极高的频率刷新,实时反馈轴的运动状态,几乎没有肉眼可见的延迟。
在运动控制方面,无论是单轴的快速启停,还是多轴的协同动作,系统都能精准执行。特别是在急停测试中,点击停止按钮的瞬间,控制器响应非常迅速,电机立刻抱闸,展现了极高的安全性。对于需要长时间运行的场景,系统内置的定时器机制也能保证位置数据的持续更新,不会出现卡死或断连的情况。
 项目源码
项目源码为了让大家更好地理解代码逻辑,这里展示核心的DLL封装与调用代码。
首先是底层的ZmcDll类,它负责与硬件对话:
publicZmcDll{// 打开以太网连接[DllImport("zauxdll.dll")]public static extern int ZAux_OpenEth(string ipaddr, out IntPtr phandle);// 单轴绝对运动[DllImport("zauxdll.dll")]public static extern int ZAux_SingleMoveAbs(IntPtr handle, int axis, float pos);// 急停[DllImport("zauxdll.dll")]public static extern int ZAux_Rapidstop(IntPtr handle, int mode);}然后是主窗体中的调用逻辑,比如连接设备:
private void btnConnect_Click(object sender, EventArgs e){string ip = cmbIP.Text;IntPtr handle;int ret = ZmcDll.ZAux_OpenEth(ip, out handle);if (ret == 0){lblStatus.Text = "已连接:" + ip;// 启动定时器刷新位置timerPosition.Start;}else{MessageBox.Show("连接失败,请检查网络");}} 总结
总结这套基于WinForm的ZMC运动控制系统,虽然从代码量上看并不庞大,但它完整地走通了从硬件连接、参数配置到运动执行的全流程。它不仅解决了实际的控制需求,更重要的是展示了一个标准的工控上位机开发示例。
项目的架构也提供了一个良好的二次开发基础,比如可以在此基础上增加多轴插补、视觉对位或者配方管理功能。在工业4.0的大背景下,掌握这样的开发能力,无疑为我们打开了一扇通往智能制造的大门。