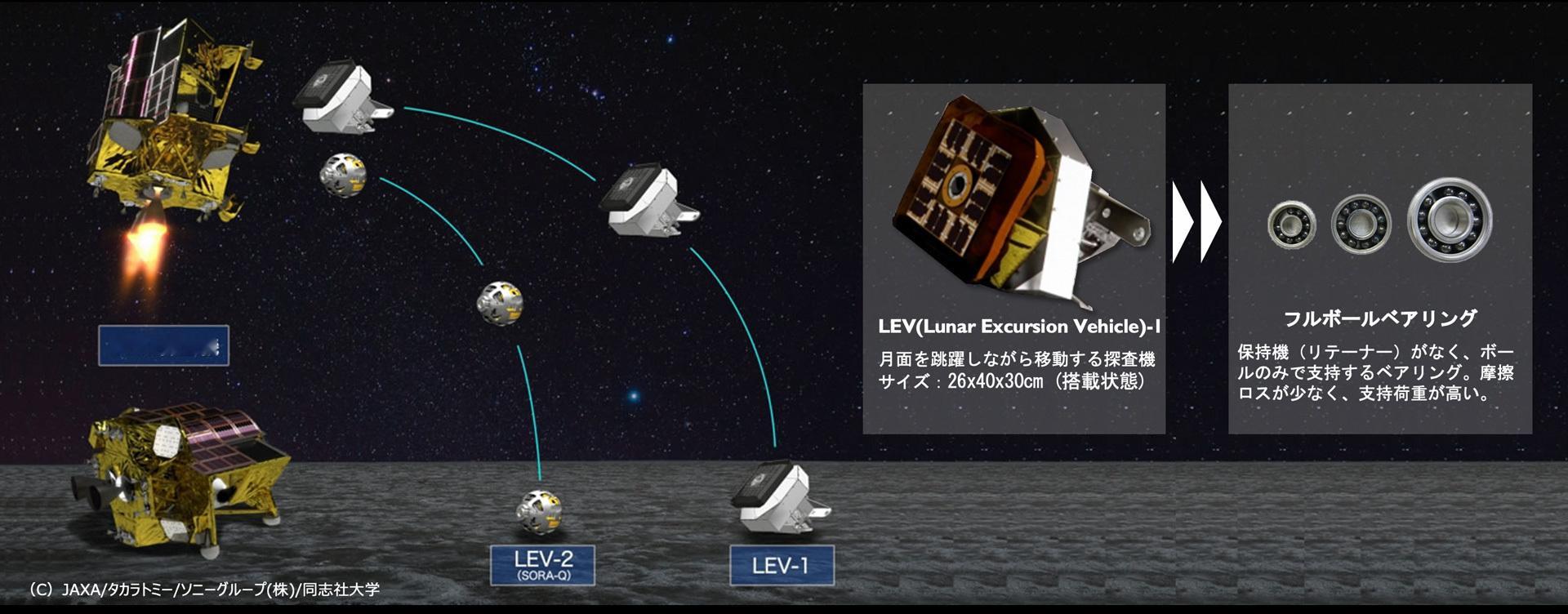
日本SLIM探月智能着陆器释放的LEV-2球体可变形机器人自身重量很小,不具备与地球直接通信功能,它所拍摄的SLIM着陆器的图像数据是由另一台超小型月面移动探测机器人LEV-1进行接力中继传输,这是世界首次在月面实现多台机器人的自主联网通信。(这事其实我们的天问一号在火星也干过,分离相机拍摄的“星火燎原”着巡合影照,也是由祝融号火星车接力传输。)
LEV-1不同于LEV-2,前者是一台基于跳跃功能的月面移动探测装置,目前这台装置是否实现了月面跳跃行进功能尚不得而知,但它实现了跨越38万公里的地月直接通信功能。

评论列表