低静空电动葫芦是一种优化空间设计的轻小型起重设备,核心优势在于吊钩极限下降距离大、上部空间占用小,适用于厂房层高受限、起升高度要求高的作业场景,广泛应用于车间、仓库、立体车库等场所的货物吊装。本文山东宏孚科技HONFU将为您详细解读其主要类型与工作原理:
一、 主要类型及其特点
根据结构布局的不同,主流低静空电动葫芦主要分为两类:
偏置式(侧置式)低静空葫芦
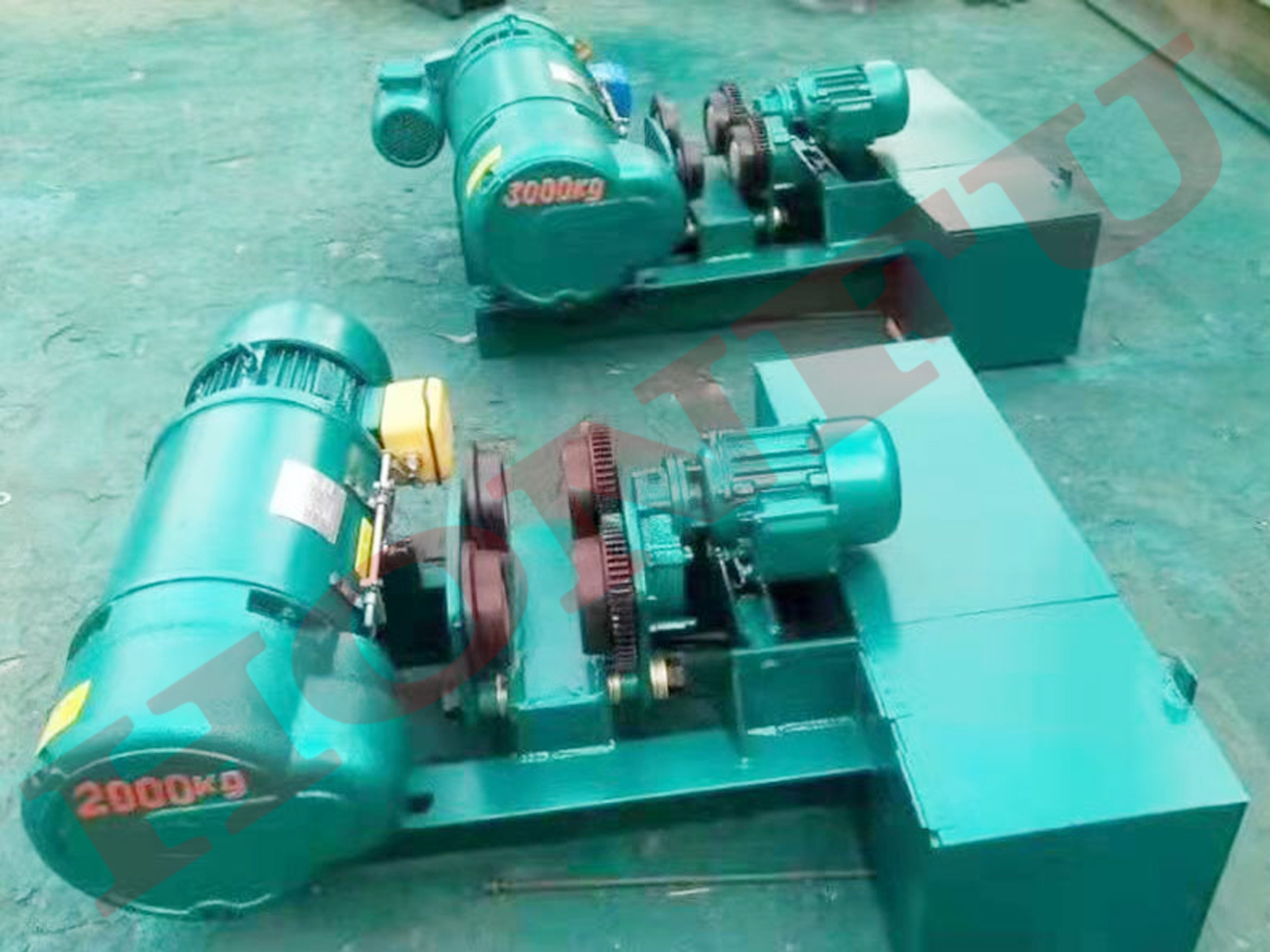
结构原理:将驱动电机和减速器安装在卷筒的侧方,通过平行轴传动来驱动卷筒旋转。这种设计打破了传统葫芦的“同轴叠加”布局。
特点:结构紧凑,能有效降低总高度;技术较为成熟,维护相对便捷;是市场上应用较为广泛的类型。
双卷筒式低静空葫芦
结构原理:采用两个平行排列的小直径卷筒,钢丝绳的两端分别缠绕其上。电机通常位于两卷筒之间或上方,实现同步驱动。
特点:能够实现更极致的低净空要求;双卷筒对称受力,运行平稳,钢丝绳排列整齐;常用于对净空有严格限制的场合。
补充类型:
低静空环链电动葫芦:凭借链轮机构自身尺寸小的特点,也能满足低净空需求,多用于轻载、精准的起重场合。
配套扁平小车:专门设计的低净空运行小车,可与葫芦配套使用,进一步压缩整套起升机构的占用高度。
低静空电动葫芦-山东宏孚科技HONFU
二、低静空电动葫芦工作原理
低静空电动葫芦的工作本质是电机驱动传动系统,带动取物装置(吊钩)做垂直升降运动,其 “低静空” 特性源于独特的结构设计,具体原理拆解如下:
1、结构组成
低静空电动葫芦主要由驱动电机、减速器、卷筒(或链轮)、钢丝绳 / 链条、吊钩组、制动装置、限位开关、电气控制系统构成。与普通电动葫芦的核心区别在于:卷筒侧置 / 偏置设计、吊钩嵌套式结构,取消了普通葫芦上部的冗余空间,大幅降低整机高度。
2、动力传递流程
启动阶段:接通电源后,电机输出动力,通过联轴器传递至减速器;减速器将高速低扭矩转化为低速高扭矩,满足吊装载荷需求。
升降阶段
若为钢丝绳式:减速器驱动卷筒旋转,卷筒收放钢丝绳,钢丝绳通过滑轮组带动吊钩组垂直升降;因卷筒侧置,吊钩可深入卷筒下方空间,提升有效起升高度。
若为环链式:减速器驱动链轮旋转,链条与链轮啮合传动,带动吊钩组升降;链条布局紧凑,进一步压缩上部空间。
制动阶段:电机内置电磁制动器或外置液压制动器,断电时自动抱死传动轴,防止吊钩因载荷自重下滑,保障停位精准。
限位保护阶段:配备上 / 下限位开关,当吊钩升至极限位置或降至最低位置时,限位开关自动切断电源,避免超程运行导致设备损坏。
3、低静空设计核心逻辑
普通电动葫芦的卷筒位于吊钩正上方,上部需预留钢丝绳缠绕空间,占用较多净空高度;低静空电动葫芦通过卷筒横向布置、吊钩嵌入卷筒下方间隙,将整机高度压缩 30%-50%,在相同厂房层高下,可提升有效起升高度 1-3 米,充分利用有限空间。
结语:
低静空电动葫芦通过巧妙的结构设计,为提升有限空间内的物料搬运效率提供了可行路径。在选择时,深入理解其类型原理,并结合实际的工况数据进行谨慎选型,是确保设备长期稳定运行的基础。山东宏孚科技有限公司(HONFU)以合规资质、定制化服务和严谨质量,助力用户实现设备价值最大化。