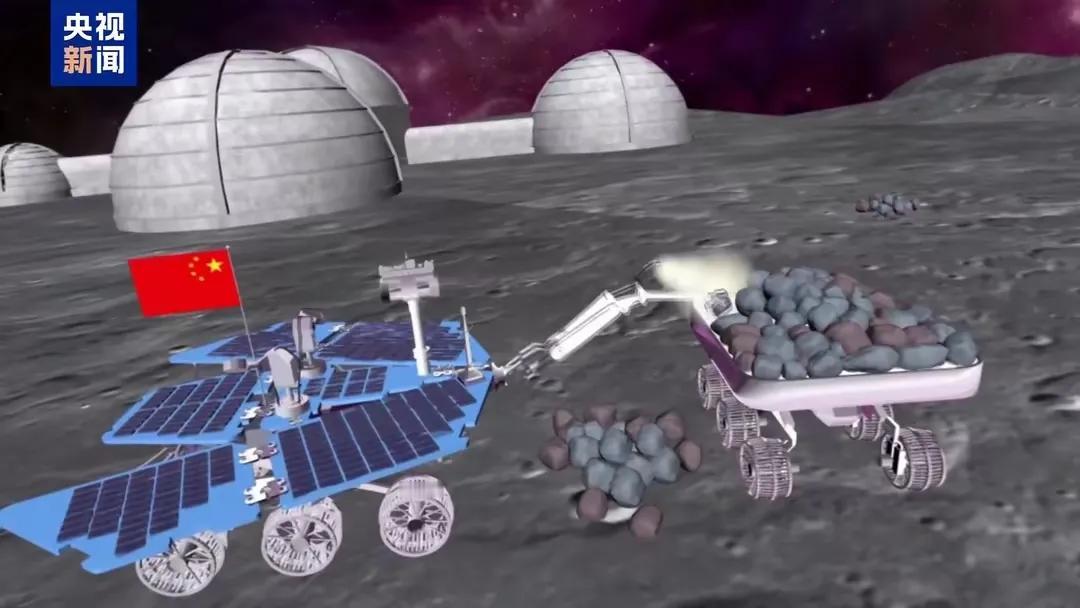
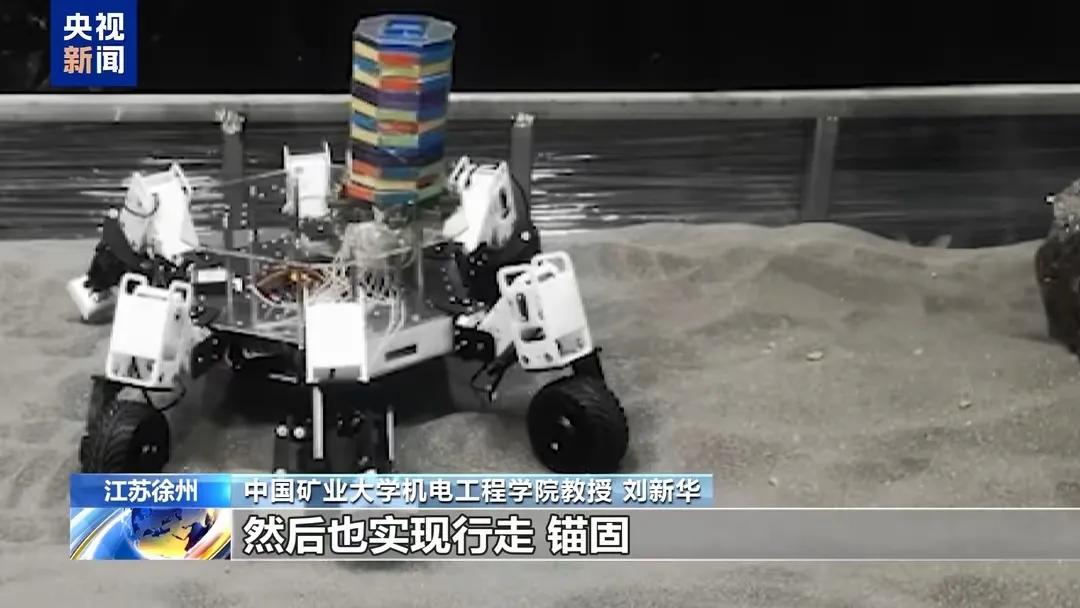
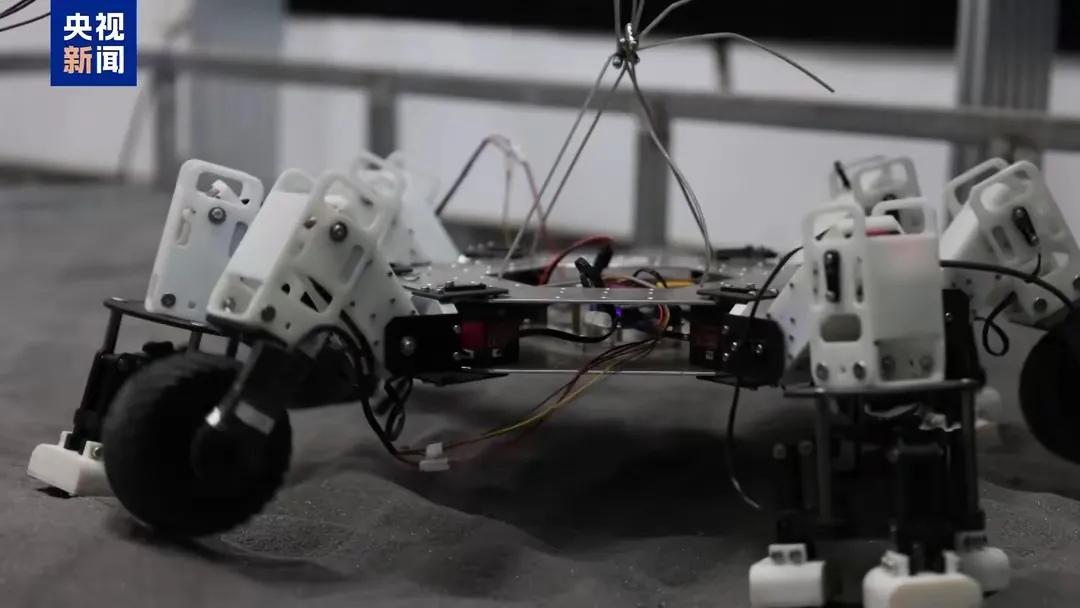
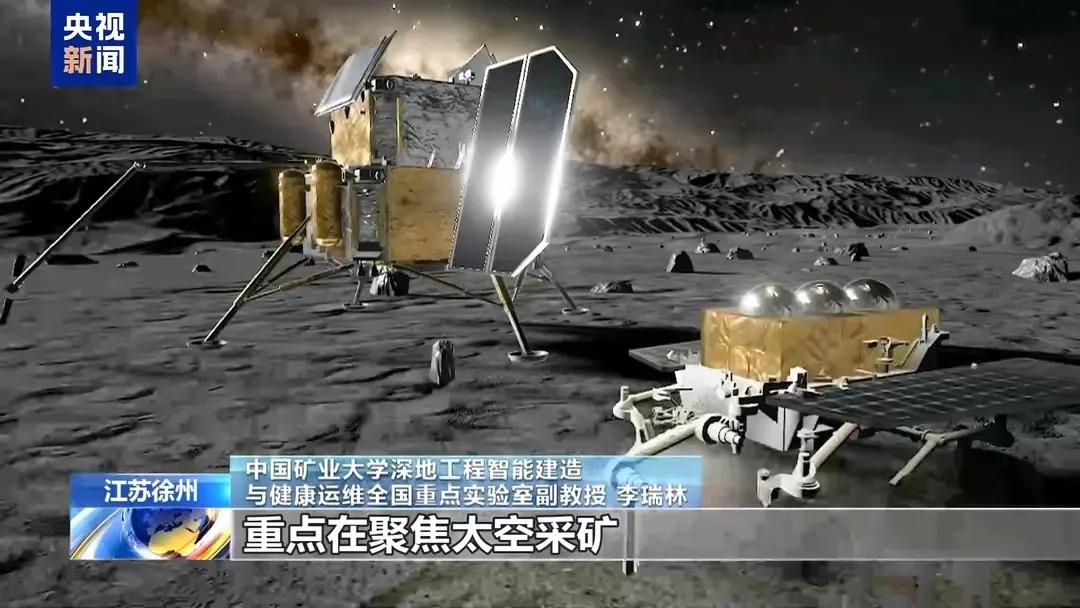
中国矿业大学刘新华教授团队研发的国内首台太空采矿机器人——“星际矿工”,近日正式问世。这一创新成果标志着我国在太空资源开发领域迈出了坚实的一步,为未来的太空采矿活动提供了重要的技术支持。 太空采矿,这个曾经只存在于科幻小说和电影中的场景,如今正逐步走向现实。随着地球资源的日益枯竭,人类的目光逐渐投向了蕴藏丰富矿产资源的月球、火星、近地小行星等星体。而“星际矿工”的诞生,正是为了满足这一迫切需求。 据刘新华教授介绍,太空采矿机器人的基本形态为六足模式,配备有三个轮足和三个爪足。这种设计主要是为了适应太空中的微重力环境。在地球重力环境下,机器人本身的重量足以支撑钻头钻进星体表面,但在月球等微重力环境中,如何让钻头顺利钻进星体表面则成为了一个难题。科研团队通过模拟昆虫的爪刺结构,为太空采矿机器人设计了特殊的爪刺足,使其在微重力环境下具有更强的附着能力和抓地能力,能够固定住进行采样,并根据地形进行移动。 除了适应微重力环境外,“星际矿工”还面临着极端温差、真空、太空辐射以及重量体积限制等一系列难题。为了解决这些问题,刘新华教授团队为其搭建了一个特殊的“训练场”,模拟近地小行星表面的风化程度和微重力环境,通过垂直悬吊抵消其重力,实现微重力的变化。经过不断的训练和调试,太空采矿机器人已经可以根据工作环境调整自身结构形状,适应地外星体的复杂地表环境。 值得一提的是,“星际矿工”原型机已经向有关部门申请专利,并且通过了初审。这标志着我国在太空采矿技术方面取得了重要的知识产权,为未来的商业化应用奠定了坚实的基础。 “星际矿工”的问世不仅体现了我国在太空资源开发领域的强大实力,也为人类探索宇宙、利用太空资源提供了新的思路和途径。未来,随着技术的不断进步和完善,“星际矿工”有望在太空采矿领域发挥重要作用,为人类的可持续发展贡献更多力量。