技术就是摸着石头,因为不能预知哪个方案最好。
比如小鹏NGP的选道策略,从我自己的使用体验来看,无图之后(因为有图的时候看图就行了)变了几次:
1、4.4-4.6版本:完全靠感知,缺点是到了看到箭头时才知道自己走没走对,会出现突然临近路口变道的情况。
2、5.1-5.5版本:参考导航给的所有车道信息(包括推荐车道和其他车道箭头),会提前进入对应车道,缺点是如果车道信息是错的,就会来回变道,因为出现了导航车道信息和感知信息打架(相信大家也有体验到)。
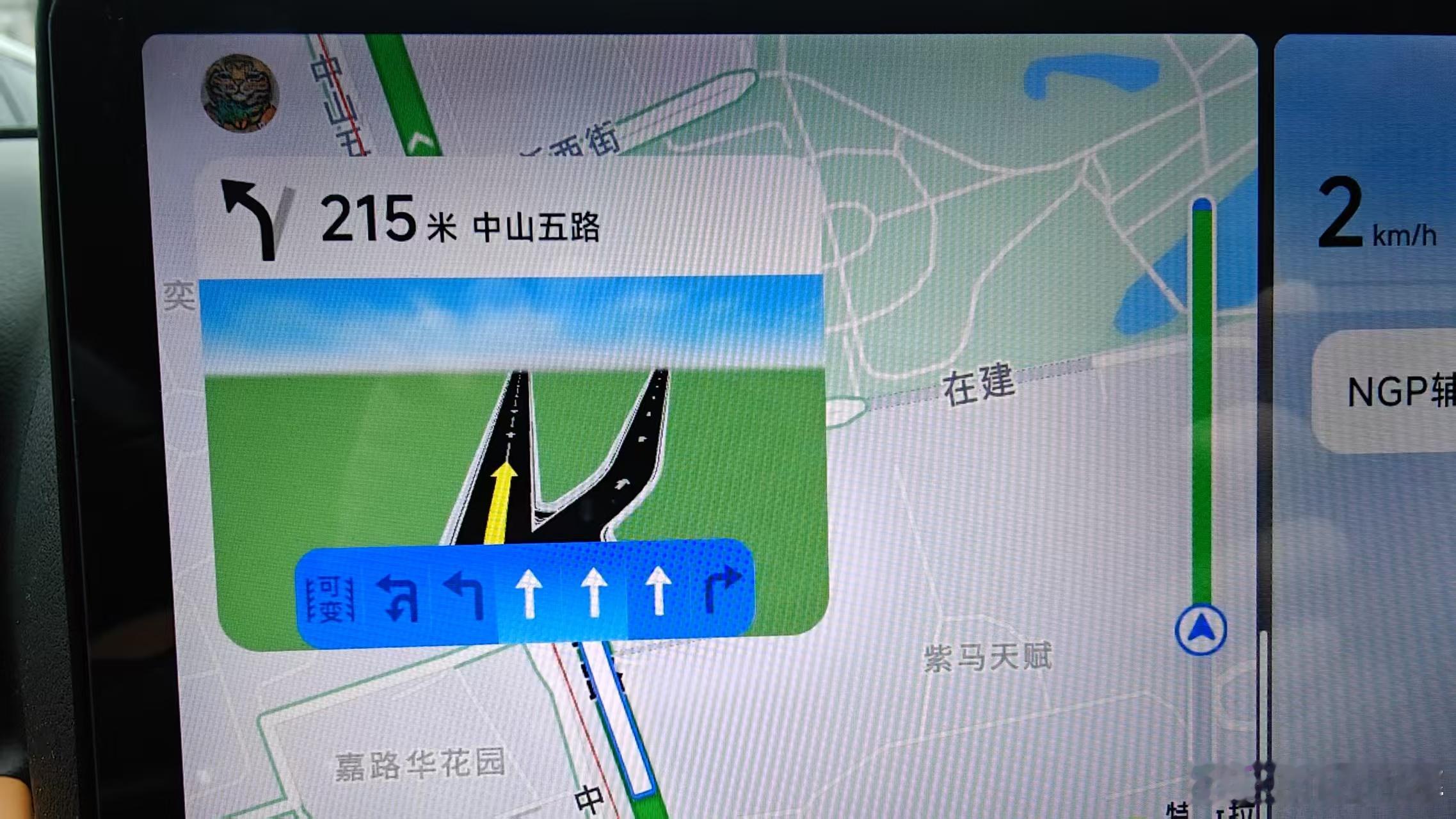
3、5.6版本以后:现在是只参考推荐车道(也就是图中发亮的车道),这个推荐车道来源于导航地图,好处是某些复杂的连续路口会避免走错,但是问题是推荐车道优先级特别高,导致出现明明在直行车道非要强行挤进去另一个直行车道。
实际上每个方法都有利弊,本质上就是导航地图的车道信息和感知信息之间的权重平衡,但无图的车道问题真的有一个完美的方案吗?
小鹏汽车