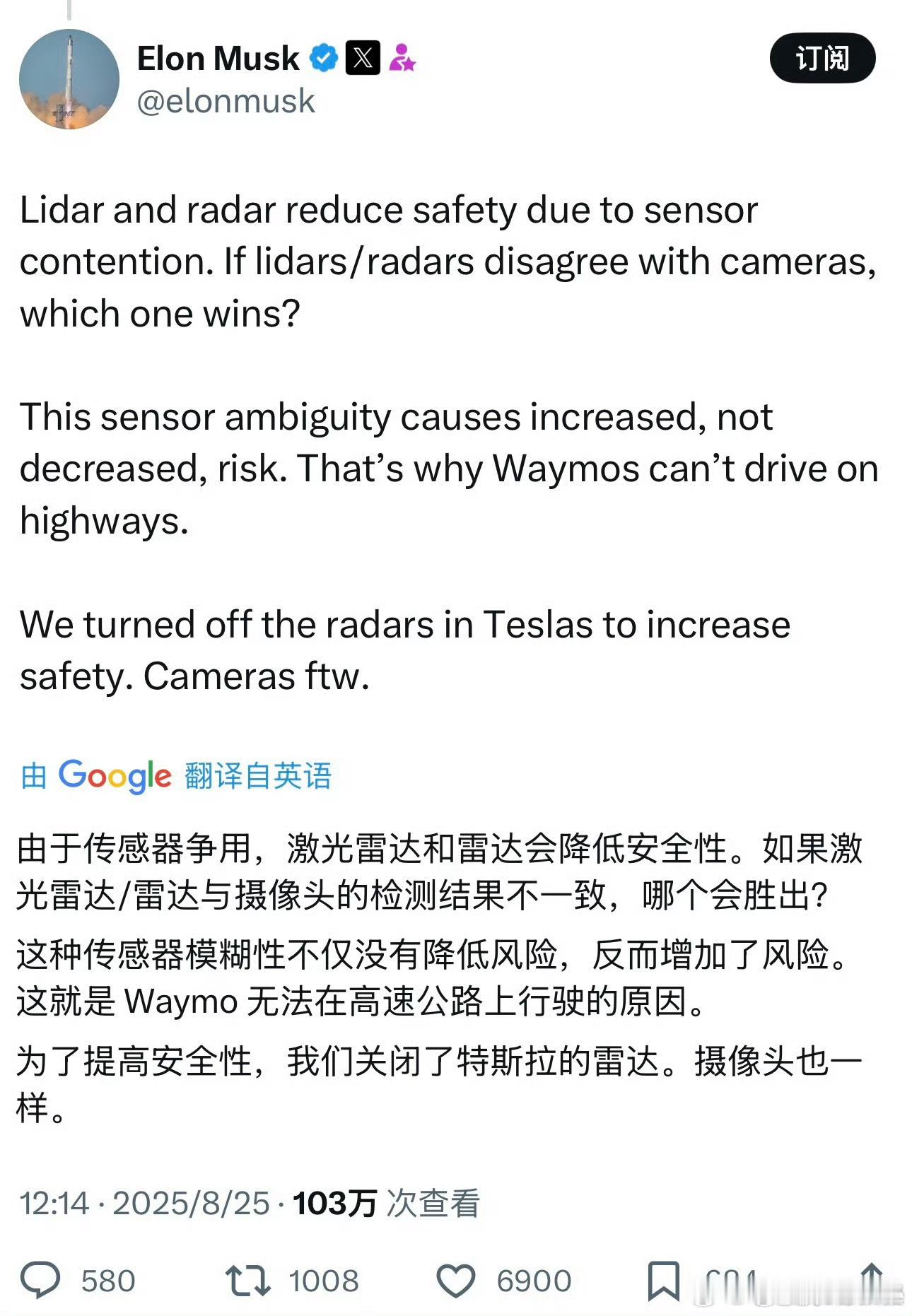
马斯克称激光雷达会让辅助驾驶更危险 马斯克的逻辑是:雷达/激光雷达有时与摄像头结论不一致,会引入歧义,因而更危险。听起来像是“学科冲突就取消一门课”。
但不一致是融合问题,不是传感器的原罪。优秀的系统用时空校准、置信度学习、互证与仲裁,把“分歧”转化为“兜底”。
雨夜逆光、白墙无纹理、隧道口骤明骤暗、黑色皮卡无反光贴、前车掉落胎块、小黑狗贴地穿行……这些视觉天然弱场景,激光雷达给出的是厘米级绝对距离,不是猜。
更现实点:行业正在把责任从“辅助”推向L3/L4的法律移交。当“出事算谁”的问题摆上台面,押注“纯视觉万能”就是用驾驶员的命玩概率。
何况今天的激光雷达已经百美元级,体积能耗和造型负担都大幅下降,“贵”“丑”“耗电”的老借口站不住了。
不否认特斯拉用纯视觉走出了一条路,也不否认融合做不好会“互相打架”。但解决方案从来不是“砍掉硬件”,而是把融合做对。
大v聊车新能源汽车