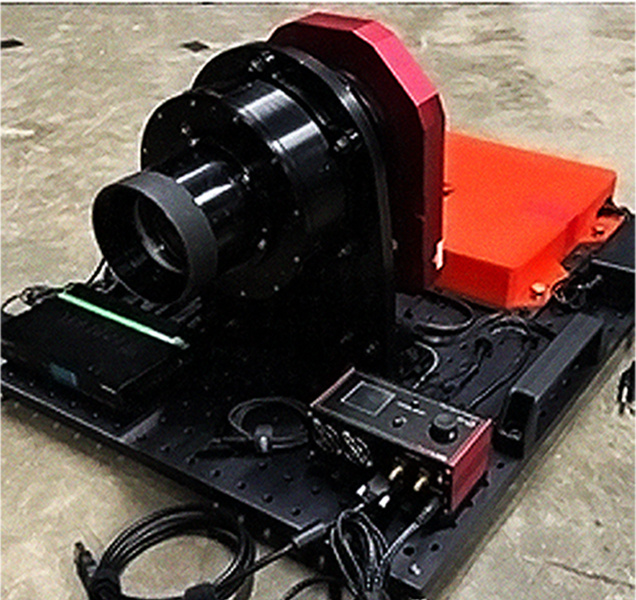
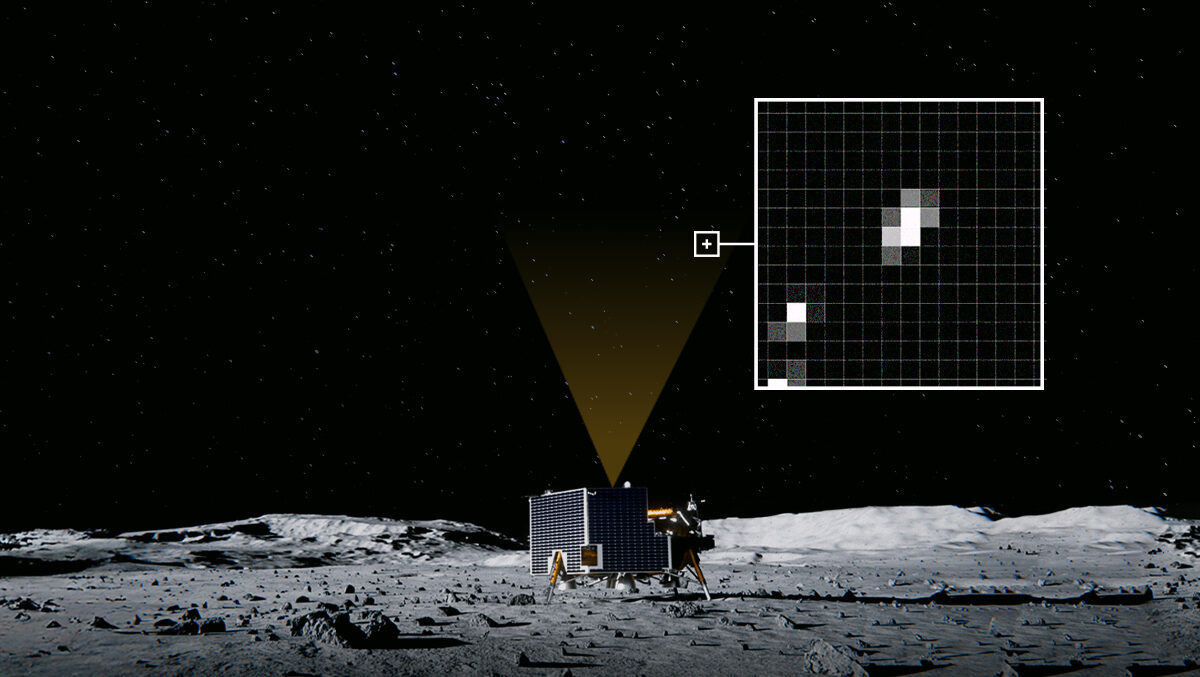
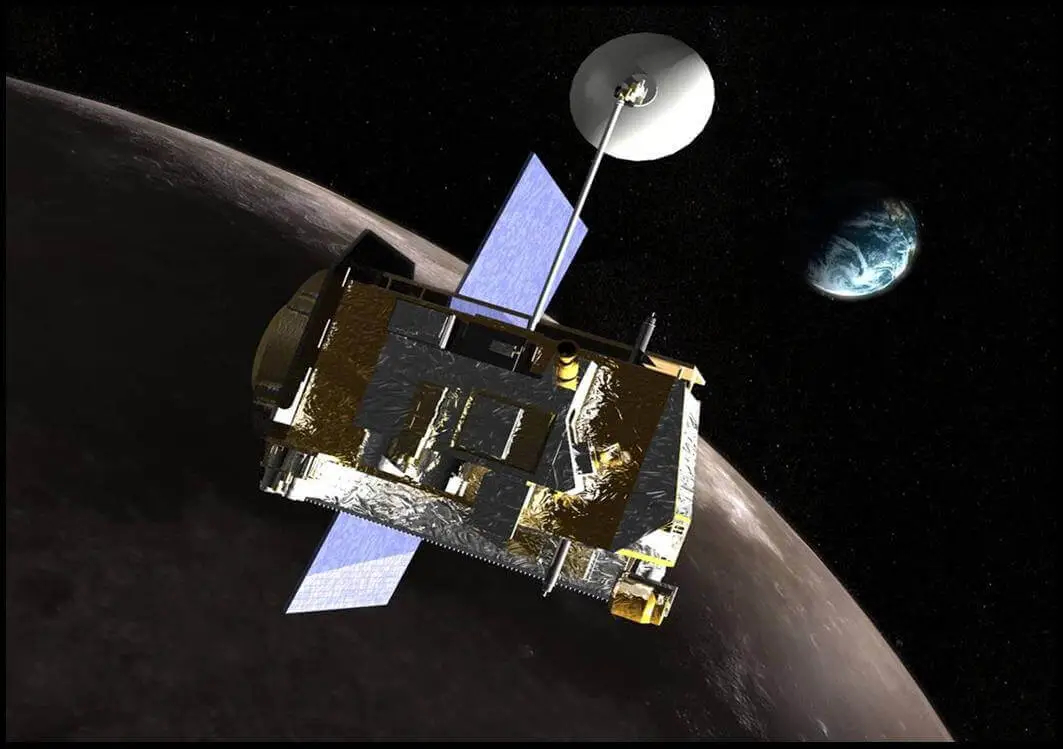
【Astrobotic研发地基监测望远镜应对碰撞风险】随着全球探月活动激增,月球轨道日益拥挤,碰撞风险正威胁着未来月面航天员的安全。美国航天企业Astrobotic公司正在开发一种名为Clavius-S的地基数字望远镜,旨在构建月球表面的空间态势感知网络,为月球活动提供碰撞预警保障。月球缺乏大气层保护,这意味着任何轨道碰撞产生的碎片或退役航天器再入都将以全速撞击月面,无法像地球那样通过大气摩擦烧蚀减速。天体物理学家Jonathan McDowell指出,坠落碎片是最可能的威胁,而陨石撞击相对罕见。根据弗吉尼亚州航空航天公司(Aerospace)2025年发表的研究,基于已发射和计划2030年前发射的任务数量,月球轨道"交会"(可能发生碰撞或近距离接近的情况)数量可能增加100倍。风险最高的区域位于月球两极——这些区域既是月球轨道的常用通道,也是美国和中国计划建立月面基地的地点。该研究以NASA月球勘测轨道飞行器(LRO)和印度月船二号(Chandrayaan-2)为例:这两颗月球测绘卫星已多次实施机动以避免相互碰撞。研究模拟显示,若二者发生碰撞并完全解体,将产生数百万个厘米级及更小的碎片,以每秒1-2公里的速度溅射至月面,其能量足以穿透航天服和居住舱。Astrobotic公司提出的Clavius-S(Cis-Lunar Automated Vision-based Identification of Unknown Satellites-Surface,近月自动视觉识别未知卫星-表面型)系统,旨在通过部署于月面的数字望远镜网络监测月球天空。该设备体积约相当于两个垒球叠放,外形类似铝制书本,配备一个或多个并列镜头指向天空。该系统源于Astrobotic为NASA另一项数字望远镜项目于2022年开始研发的技术。公司计划今年3月完成Clavius-S设计(获NASA 15万美元资助),若进入下一阶段将获得85万美元用于研制原型机并进行地面测试。后续计划将原型机搭载于地球轨道立方星进行在轨演示,目标2028年具备月面运行能力,并希望最终搭载于月球着陆器进行月面验证。当前月球轨道跟踪依赖航天器运营商提供的弹道数据,由NASA多任务自动化深空交会评估流程团队预测轨道和潜在交会。McDowell指出,月球质量分布不均("块状"引力场)增加了预测复杂度,且目前仅11颗已知航天器绕月运行,信息协调尚不困难,但未来规模扩大后将面临挑战。Clavius-S采用计算机视觉硬件和星上图像处理算法,技术继承自Astrobotic的"游隼"(Peregrine)和"格里芬"(Griffin)月球着陆器传感器,以及国防部资助的航天器导航与对接系统。望远镜扫描广阔视场,采集图像序列,通过比对背景已知恒星,从不同角度随时间变化确定经过目标的方位、速度和运动方向,进而预测其轨道。与地基或轨道观测相比,月面监测具有独特优势:地球和天基光学/射频传感器常被月球反射强光致盲,即使大型地基望远镜也难以在地球距离上观测大型月球着陆器。Clavius-S针对月面环境优化,需处理从月面观测时快速移动的高亮度目标(即使是小型立方星在月球天空中也显得极亮)。系统采用宽视场、小型光学设计以降低尺寸、重量和功耗,可在100至1000公里范围内监测其他航天器机动,功能类似于"门铃摄像头"。Astrobotic设想该传感器可搭载于各公司月球着陆器、大型巡视器及未来月面太阳能电池阵节点,构建综合跟踪网络。核心挑战在于有限的计算能力需实时处理大量高分辨率图像。Clavius-S计算机必须在传感器捕获下一帧的同时处理刚获取的图像,且处理过程不能引入噪声。图像处理流程包括:去除本底噪声、通过比对数字星表识别最亮恒星并剔除、提取潜在目标、评估目标在后续图像中的位置变化及运动轨迹。最终仅提取目标轨迹、相对亮度等关键信息形成遥测数据包,而非传输完整图像,以克服月地通信带宽限制。