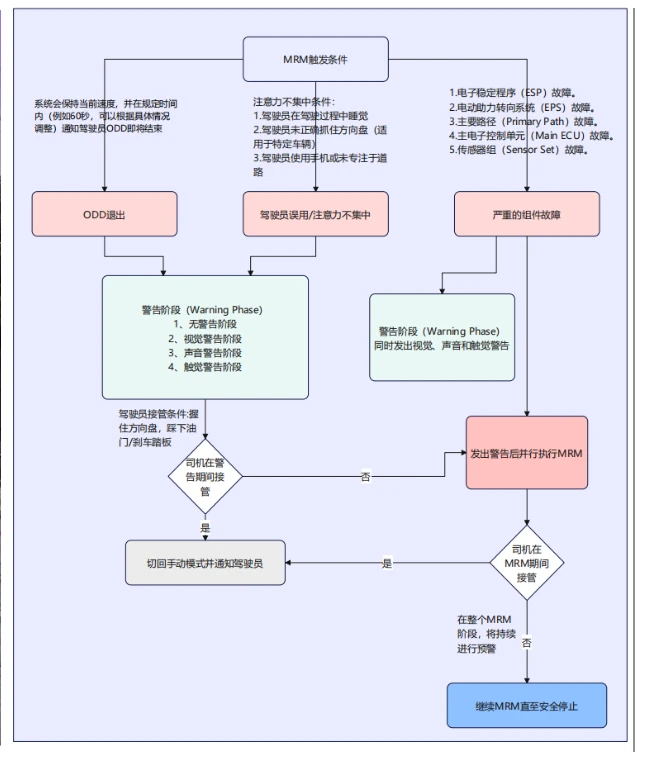
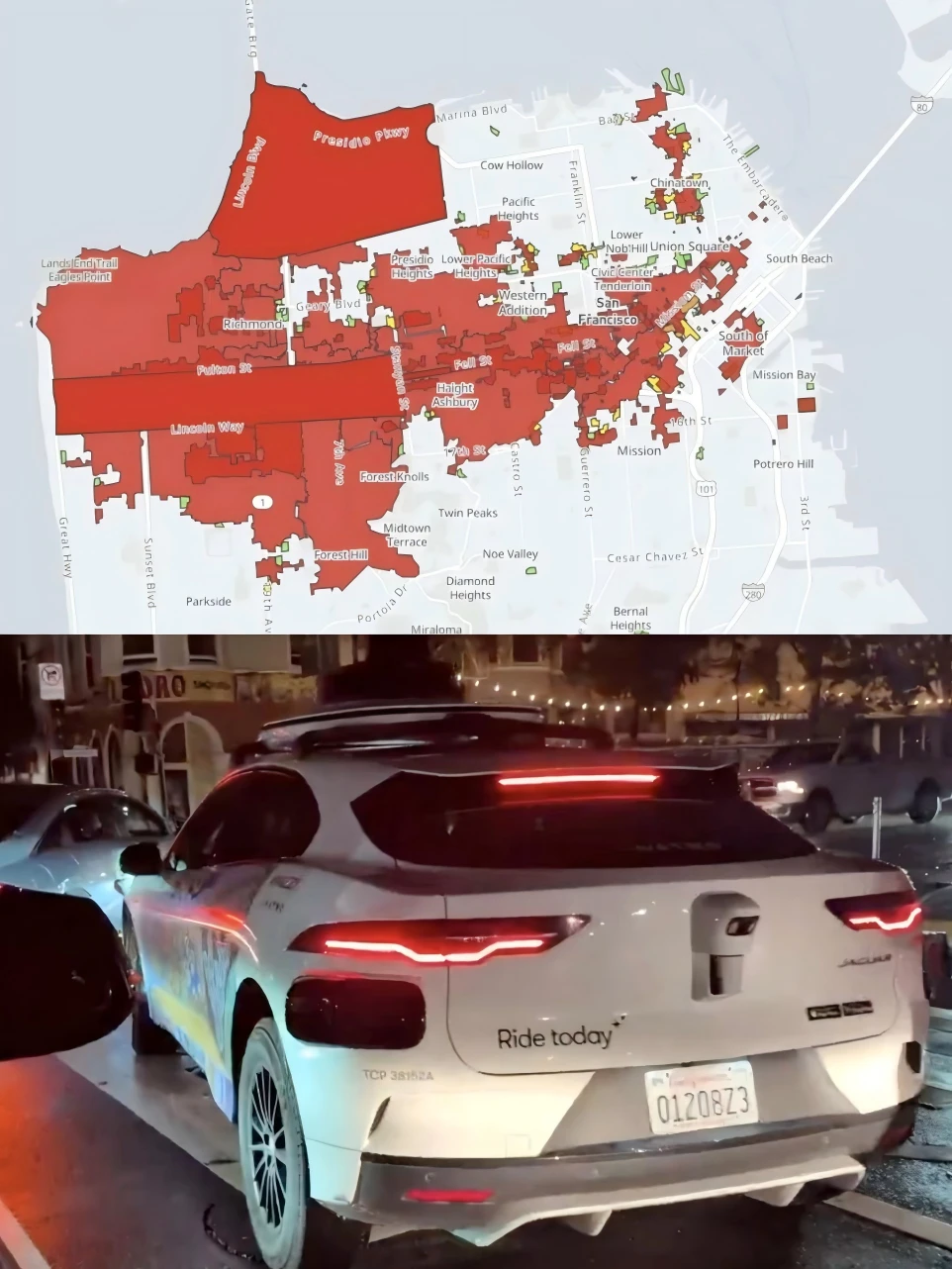
很多人以为是不是车坏了?不过我觉得很可能的一个原因是,主动安全机制。这一次车辆主动启动了最小风险策略,就是系统觉得有风险,那就先停下来,打开双闪,等人来处理。这跟家用车发动机故障灯亮了自动限速、飞机自动驾驶仪检测到异常切换到降级模式,是一个道理。不是车坏了,是安全机制在起作用。类似的情况去年12月在美国旧金山也发生过。当时变电站火灾导致大范围停电,Waymo无人车面对失效的信号灯,同样触发了这个策略,停在路口打双闪。
这次事件,百度反应的还挺快的。事发后不久,受影响路段就恢复了正常。
一直对萝卜快跑还挺有好感的,不得不说,萝卜快跑的自动驾驶确实带着满满的未来感。从实验室一步步走到街头,肯定会遇到各种没见过的复杂场景。每一次这样的 “停摆”,其实都是在给系统积累经验,毕竟没有哪项技术是一开始就完美的。
而且这次也没有人员受伤,从安全角度来说,车辆主动停车避免了更危险的后果,这恰恰是 L4 级自动驾驶 “安全冗余” 设计的价值所在。后续还是希望萝卜快跑能继续加速优化,越来越稳,咱们也多给新技术一点理解和耐心,毕竟 “出了事如何兜底、怎么快速迭代”,才是衡量企业实力的关键呀~
话题: