章鱼动力开始有新动作了,他们正式发布面向灵巧操作的全模态数据采集系统 SYNData。
现阶段具身数据的采集仍然存在诸多挑战:1、全模态:不仅要获取视觉,还要获取手部位姿、全掌接触状态与力分布;2、高精度:真正有价值的是高保真、高质量的数据;3、大规模:覆盖海量真实任务、场景,支撑基础模型训练;4、零干扰:不改变人的自然操作方式,采集人的原生行为。
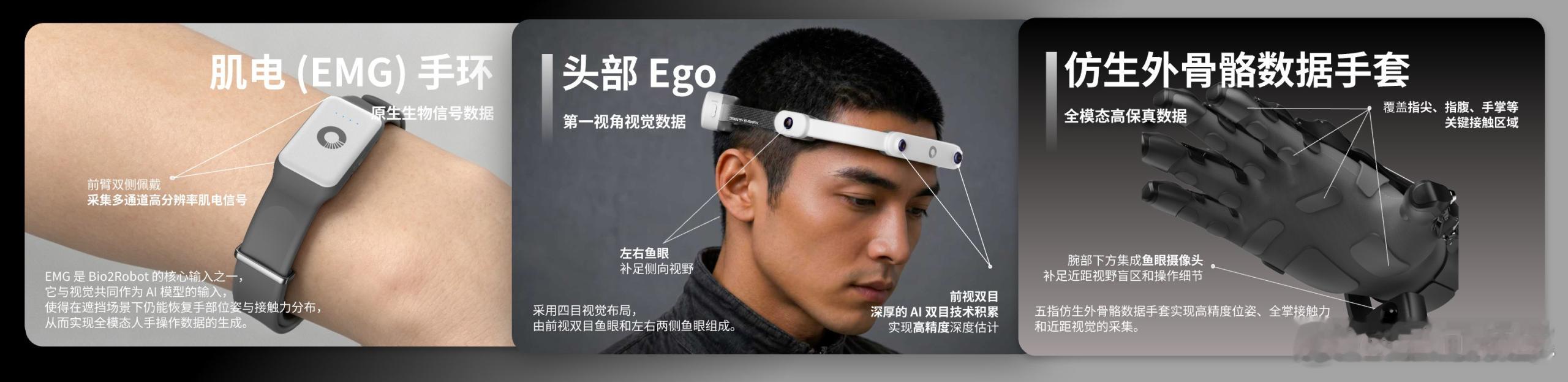
为此,章鱼动力推出涵盖头部 Ego、肌电(EMG)手环和仿生外骨骼数据手套的三大核心硬件模块,旨在建立一套系统,把人类产生的“碳基”操作信号,转变为“硅基”机器人数据。
这套模块的核心,不是继续堆叠更多传感器,而是基于 Bio2Robot 的机制,用 AI 模型,把人类生物学信号转化为机器人可学习的数据。
具身智能机器人