技术巡猎 比亚迪 一种飞行器、飞行器组件和车辆---车顶无人机这个概念,大家已经见过很多次了,可是无人机飞回来以后,怎么在车顶这个小地方“停准、收好、充上电”可真是个问题。
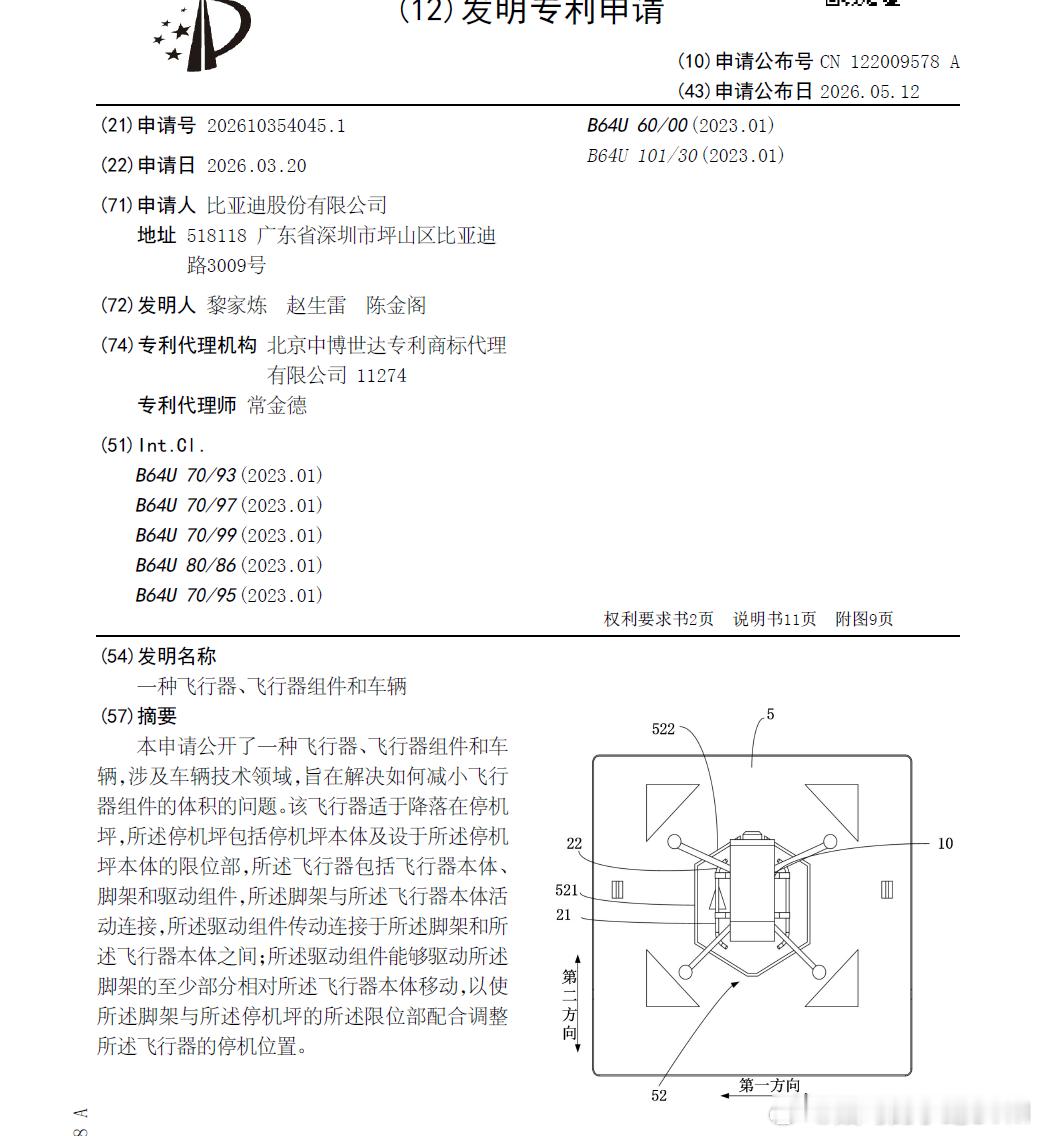
这不是航拍玩具问题,是车顶空间管理问题。专利这套方案的目标,是减小飞行器组件的体积;飞行器落到停机坪后,通过脚架和停机坪上的限位结构配合,调整停机位置。
普通人可以把它想象成这样:无人机不是随便落在车顶一个板子上就完事了。它要落到一个小盒子里,位置需要很准,才能被固定住、盖上盖、充电、下次再飞。位置偏一点,可能充电触点对不上;偏多一点,盖板可能关不上;再偏一点,就尴尬了。
传统思路是这样的:在停机坪里做一堆归位机构,比如推杆、夹臂、滑块,把无人机推到正确位置。这个办法不是不行,但问题是底座会越做越大。车顶本来就不是机库,既要兼顾风阻、造型、密封、强度,还不能太占空间。再往里面塞复杂归位机构,最后大概率就是一个车顶大盒子。
比亚迪把一部分“归位能力”从停机坪挪到无人机自己身上。它让无人机的脚架自己动起来。飞行器包括飞行器本体、脚架和驱动组件,驱动组件能带动脚架相对本体移动,让脚架去和停机坪上的限位部配合,从而把无人机的位置调正。
这个逻辑很像停车。普通停车位只是画线,你得自己把车停进去;高端机械车库是平台来搬车。这个专利更像第三种:车自己伸出“辅助轮”,蹭着车位边界,把自己摆正。机械原理并不复杂,关键是把动作分配重新想了一遍。
专利里提到脚架可以有第一脚架、第二脚架,两边可以反向移动或者反向转动。这样做的好处,是受力更均匀,不容易卡。可以理解成两只脚同时往外撑,碰到停机坪边界以后,身体自然被校正到中间。
更细一点看,它的脚架不是单纯两根杆。脚架上有“配合部”和“导向部”。配合部负责一个方向的位置修正,导向部负责另一个方向的位置修正。停机坪上对应有第一限位部、第二限位部,类似一个带边界的停机框。无人机落下去之后,脚架一展开,导向部沿着边界滑,配合部再顶住限位结构,横向、纵向位置就被一点点拨正。
就是无人机自己“把鞋穿进鞋架”。鞋架不用做复杂机械臂,只要边界设计得对,无人机的脚一伸、一撑、一滑,就能找到正确位置。
车载无人机最大的问题,是它必须进入整车体系。它不能像普通消费无人机那样,用户拿出来、放平、起飞、手动收回。车上的东西讲究的是自动化、可控、可收纳。尤其是车顶环境,风吹日晒雨淋,灰尘、震动、高低温都得扛住。一个无人机要真正“上车”,它就不能只会飞,还得会回家。
还提到了多个飞行器的组合。多个无人机可以协同工作,也可以交替工作来提高续航;后面还写到探路、预警、拍照等模式。单架无人机飞一会儿就回来充电,本质上还是个玩具附件;如果两架甚至多架轮换,一架出去探路,一架在车顶充电待命,系统味道就出来了。