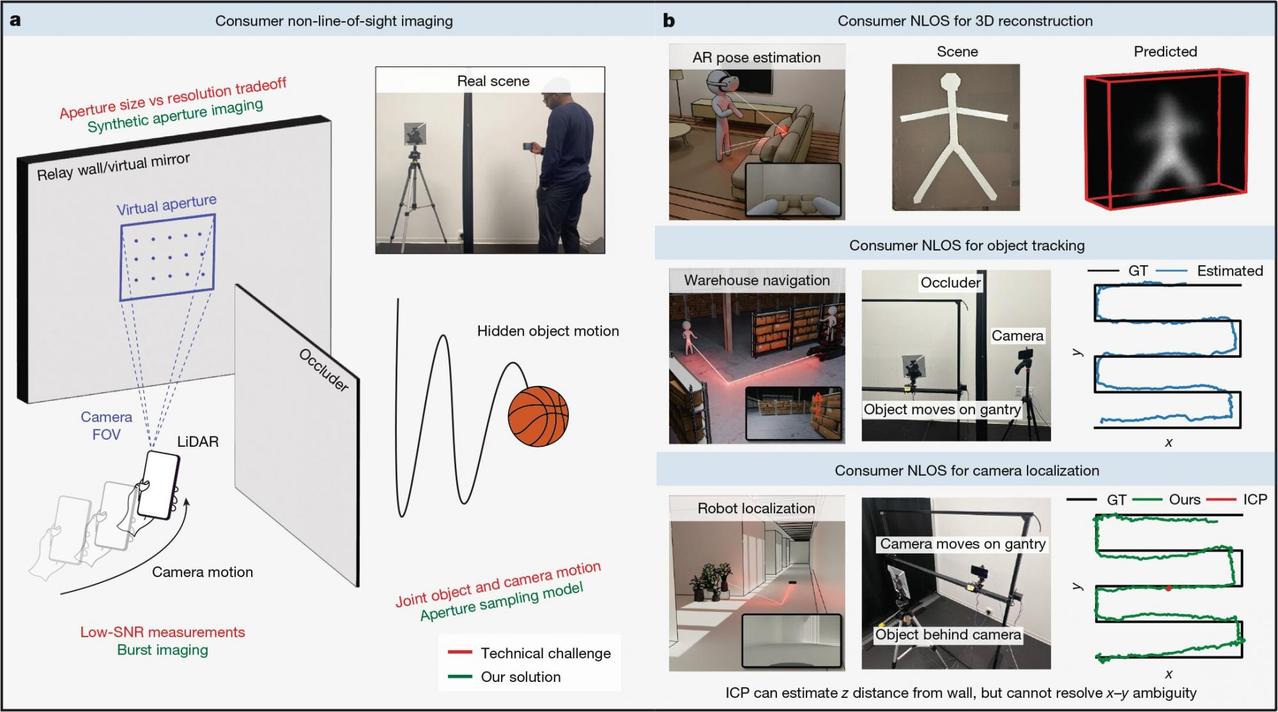
麻省理工学院的科学家开发了一种软件方法,使得一些高端智能手机内置的低成本激光雷达传感器能够分析散射光检测物体并追踪其移动,即使在障碍物后面。相关成果已经发表在《自然》杂志上。直到现在,能够看到墙后或拐角处的物体,还需要昂贵的研究设备和笨重的激光系统。标准激光雷达的工作原理是发送光脉冲并测量光脉冲从视线内物体返回的时间。麻省理工学院开发的算法正在从根本上改变数据处理的过程。软件不会忽视墙壁、地板或天花板反射的微弱散射光子,而是捕捉细微信号。通过结合设备运动过程中从不同角度获得的数据,系统合成出整体图像,重建物体在直接观察区域外的形状和动态。在实验室测试中,研究人员使用了成本不到100美元的标准消费级激光雷达传感器。测试期间,系统成功运行。1、追踪动作:实时记录隐藏在隔板后的人体模特的动作。2、构建三维模型:该算法创建了近似数字复制品,这些物体从未落入传感器的“视场”内。此阶段,如果系统事先知道物体的大致形状,技术效率会提高。科学家的下一步任务是训练人工智能识别完全未知或可变的形状。麻省理工学院的科学家表示,这将使技术更加灵活。这对高科技市场意味着什么?此类技术的引入可能成为空间定向至关重要行业的新标准:1、自主机器人:机器人能够在转角出现前就避免与人相撞。2、可穿戴设备:为视障人士开发智能辅助系统,能够提前“看到”房间布局和障碍物。3、消费电子产品:在未来几代智能手机中,LiDAR功能预计将获得软件更新,显著扩展增强现实(AR)和安全能力。研究作者解释道:“我们的目标是实现间接监控能力的民主化。生产设备上向即插即用解决方案的转变将从根本上改变智能设备感知周围世界的方式。”