集成EtherCAT芯片大幅降本降耗!兆易创新MCU打通人形机器人控制核心链路
核心事件:兆易创新推出内置EtherCAT一体化MCU芯片GD32H75E,单方案实现系统成本下降50%、功耗缩减40%-60%,依托自研实时通信IP、宽温工业级工艺、全梯度MCU产品矩阵,切入人形机器人关节、灵巧手核心控制市场,已对接200余家机器人企业,超百家落地量产。
一、EtherCAT补齐核心通信短板,大幅提升机器人运动控制精度
人形机器人数十个自由度同步动作高度依赖低延迟实时通信,传统CAN FD控制周期2-5ms,动作响应滞后易失衡摔倒。
兆易创新自研集成EtherCAT IP的MCU,将PHY、编码器接口一体化封装:
1. 控制延时压缩至1ms内,同步精度达微秒级,应对奔跑、踩空避让、障碍物急停等高动态场景;
2. 高带宽支撑激光雷达、超声多传感器同步信号处理,动作流畅度大幅提升;
3. 国内少数具备成熟EtherCAT芯片自研能力厂商,打破海外通信技术壁垒。
二、四大核心产品优势,适配人形机器人特殊工况
1. 全梯度MCU产品矩阵
国内通用MCU市占第一,600+型号,超百款适配机器人;M0/M23适配灵巧手、M4适配常规关节、M7高端内核用于高精度谐波关节,全覆盖高低端需求。
2. 工业级高可靠+功能安全认证
芯片耐温优化至125℃,适配电机持续运转100℃以上高温关节;通过IEC 61508 SIL2/SIL3功能安全认证,内置冗余自检,故障自动制动防倾倒。
3. 微型化封装兼顾终端成本
推出4×4mm极小BGA封装芯片,不盲目极致缩小尺寸,平衡PCB层数、贴片加工成本,解决关节内部无散热风扇、空间狭小痛点。
4. 本土快速配套保障供应链安全
国内机器人厂商专属定制研发服务,交付响应速度领先海外芯片厂商,规避海外供货波动风险。
三、产品落地成效显著,解决行业两大痛点
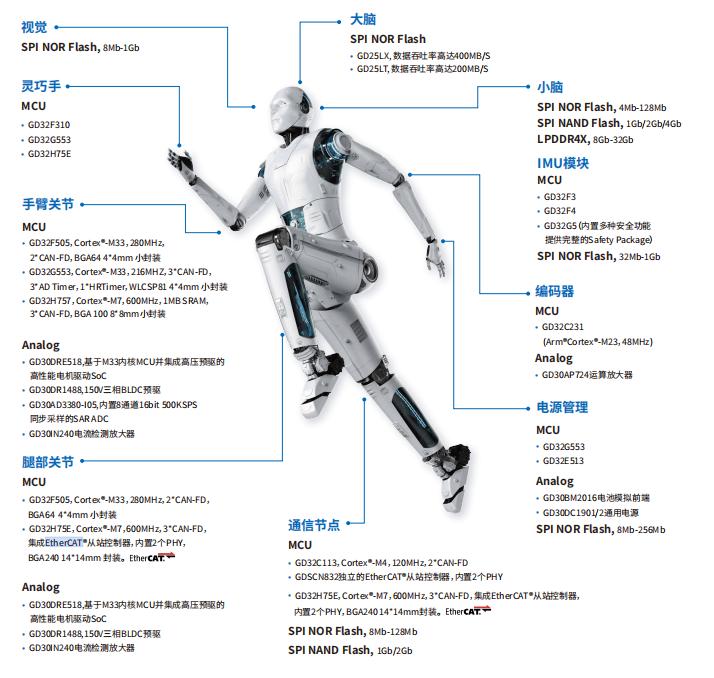
1. 腿部关节:EtherCAT替代传统CAN总线,解决线束臃肿、通信速率不足问题,整机动态平衡能力大幅升级;
2. 灵巧手:高集成一体化芯片替代分立主控+外挂MOS方案,大幅缩减内部元器件占用空间,适配微型机械手结构。
行业增长逻辑
人形机器人商业化加速,关节实时控制、小型化、低成本成为刚需,EtherCAT将逐步成为行业通用通信标准。兆易创新一体化MCU方案同时解决延时、体积、功耗、成本多重痛点,持续拓展机器人客户,充分受益人形机器人量产扩张红利。
以上信息仅供参考,不构成投资建议。