硬核老哥外网爆红!用钓鱼线自制50美元家务机器人“线缆侠”。。。
试想一下这个画面:你下班回家,推开门,房间里横七竖八地躺着昨晚脱下的脏衣服、臭袜子。你叹了口气,刚想挽起袖子收拾,突然头顶传来一阵细微的电机转动声。
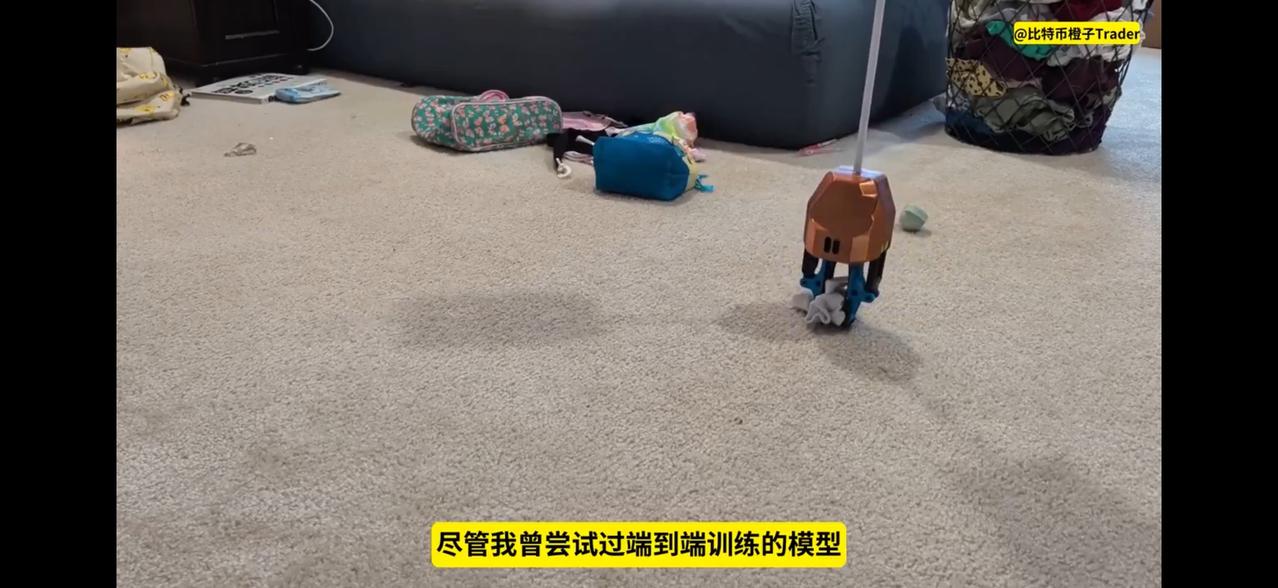
一个长得有点像“火星探测器”的 3D 打印小爪子,正悬空吊在几根钓鱼线上,在你的卧室里灵巧地漂移。
它精准地俯冲、合拢、抓起地上的袜子,然后“嗖”地一下滑翔到床尾,稳稳地把袜子扔进了洗衣篮里。
这不是科幻电影,而是一位国外硬核极客老哥在自家卧室里搞出的真实发明。他给这个机器人起名叫 Stringman(线缆侠)。
更离谱的是,这位老哥没有用任何动辄十几万的工业机械臂,也没有用昂贵的激光雷达。
他仅仅靠着几根两块钱一卷的钓鱼线、一个 3D 打印的爪子,就让这个简陋的硬件化身成了家务能力“稳得一批”的具身智能 Agent。
我们来拆解一下,这个低成本的“天花板奇迹”究竟是怎么对传统机器人进行降维打击的?
一、 硬件不够,钓鱼线来凑:什么是“电缆机器人”?
在我们的固有印象里,家务机器人应该是人形的。
人形机器人好是好,但普通人根本买不起。
这位老哥直接换了个思路:既然在地面上走路这么贵,我为什么不把它吊到天花板上?
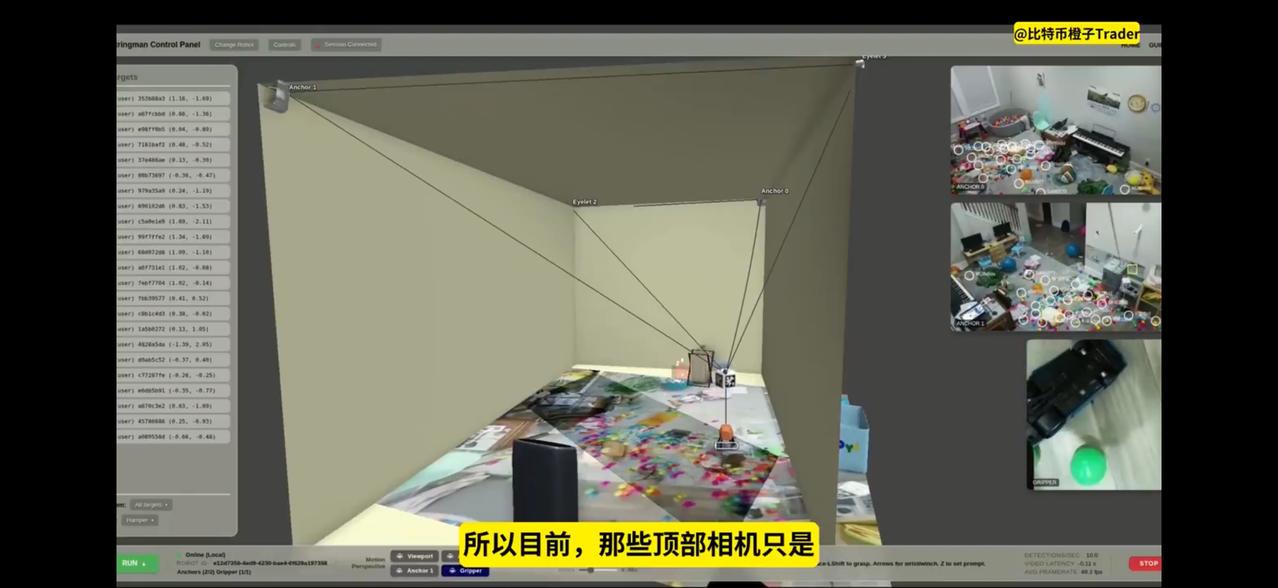
他在卧室天花板的四个角落里,分别固定了四个由步进电机控制的卷线器。四根高强度的 PE 钓鱼线从四周延伸出来,共同拴住中央的 3D 打印抓取头。
这种结构在机器人学里有一个高大上的名字:平行动力电缆机器人(CDPR)。
只要四个电机协同工作,有的放线、有的收线,就能拽着中央的爪子在房间的三维空间里高速、平稳地移动。
这样设计优点很多:
超大范围:传统机械臂的臂展只有 1 米左右,而 Stringman 吊在空中俯瞰全场,完美避开了地面的障碍,直接覆盖大半个卧室。
极致省钱:钓鱼线便宜、拉力强、几乎没有重量。老哥可以用最廉价的电机,轻松撬动整个房间的物理空间。
二、 二维码与小木棍:老哥是怎么“教”AI 做家务的?
硬件搭好了,它自己并不会动。怎么让它知道地上的脏衣服在哪,又怎么学会“抓取”和“松手”呢?
仔细观察图片,会发现坐在床上的老哥手里拿着一根小木棍,顶端贴着一张黑白相间的方块标签。
同时,第二张图片里,洗衣篮的边缘也贴着同样的标签。
这可不是什么神秘的魔法符号,而是一种叫AprilTag的视觉定位标签,可以理解为一种高精度的“工业二维码”。
老哥在天花板上装了摄像头,摄像头通过识别这些二维码,就能实时、精准地知道洗衣篮在哪里,以及老哥手里的木棍在哪里。
接下来就是最硬核的“行为克隆”环节了:
老哥坐在床上,手里挥舞着木棍,像玩提线木偶一样,遥控着天花板上的爪子去抓地上的衣服。爪子动一步,电脑就会记录下这一刻的摄像头画面和电机的收放数据。
这就叫人类示范(Teleoperation)。老哥在房间里当了几个小时的“人形外挂”,喂给了 AI 几十组真实人类操作数据。
三、 注入灵魂:Sora 同款模型,把廉价硬件变聪明。
有了数据,老哥在本地电脑里祭出了大招——训练了一个基于Diffusion的端到端 AI 模型。
对,你没听错,就是和前阵子火爆全球的视频生成大模型 Sora,以及各类主流 AI 绘图工具底座相同的技术架构。
扩散模型(Diffusion Policy)的逻辑是“生成”。对这个 AI 来说,做家务不是在做数学题,而是在“画画”。
它把老哥输入的摄像头画面当成提示词(Prompt),然后开始疯狂计算:“基于当前的画面,人类下一步最可能把电缆收紧几厘米?”
AI 就像生成视频一样,一帧一帧地“生成”机器人的动作指令。
这种算法对现实世界的容错率高得惊人。
地上的衣服不管是团成一团,还是平铺在地上;不管是红色的短袖,还是黑色的袜子,AI 都能在画面中精准捕捉到它的特征。
四、 这对未来的机器人意味着什么?
这个硬核项目之所以在科技圈刷屏,是因为它打破了大家对“具身智能”的焦虑。
过去一段时间,大家总觉得要实现 AI 帮人类洗碗、扫地、做家务,必须等到十几万一台的人形机器人普及。
但 Stringman 用极其接地气的方式证明了:在AI 算力大爆发的今天,优秀的算法和聪明的工程结构,完全可以用来弥补硬件上的低劣与粗糙。
它用几根钓鱼线和一台能跑模型的电脑,给高高在上的前沿科技来了一次充满极客浪漫的“降维打击”。
也许在不久的将来,你不需要买一个昂贵的机器人管家。你只需要在装修时,在天花板的四个角预留几个隐形的卷线器。剩下的,交给用钓鱼线默默帮你收拾房间的 AI Agent 就够了。