该人工肌肉利用液态金属通道进行运动、感知力量并监测拉伸,无需外接独立传感器。
研究人员开发出了一种能模拟生物肌肉-肌腱系统的智能人工肌肉。
首尔大学的研究团队利用嵌入液晶弹性体中的液态金属通道,制造出了这一装置。该人工肌肉在受到电刺激时会收缩,同时还能实时测量内部力量和长度。这一突破有助于开发更具适应性的下一代人形机器人,使其具备类人的感知和运动能力。
近期,麻省理工学院媒体实验室和意大利巴里理工大学的一个研究团队开发出了电流体纤维肌肉,能为机器人和可穿戴设备提供类似天然肌肉的力量、速度与控制能力。
类人肌肉系统
随着社会对更类人的机器人和辅助系统的需求日益增长,研究人员正在寻找能够实现精细运动、感知环境并安全交互的机器人致动器。其应用范围涵盖人形机器人、物流自动化、康复及医疗器械等领域。然而,传统人工肌肉面临局限性,因为它们的致动和感知功能是分离的,需要额外的传感器和复杂控制系统。
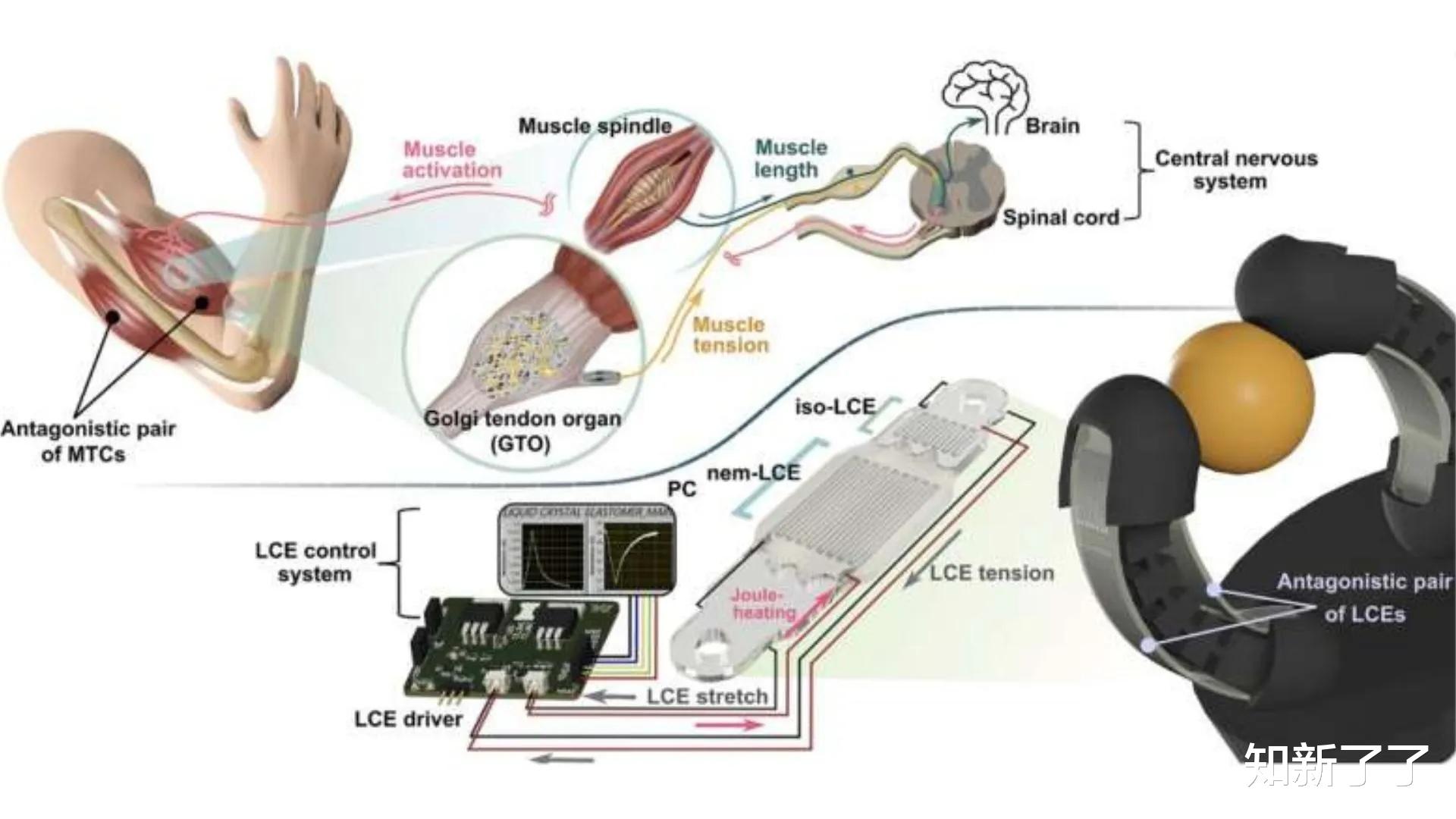
为克服这些挑战,首尔大学工学院受生物肌肉-肌腱复合体启发,开发出了一种智能人工肌肉。该系统基于液晶弹性体,将感知与致动集成在单一结构内,实现了研究人员所称的物理智能。
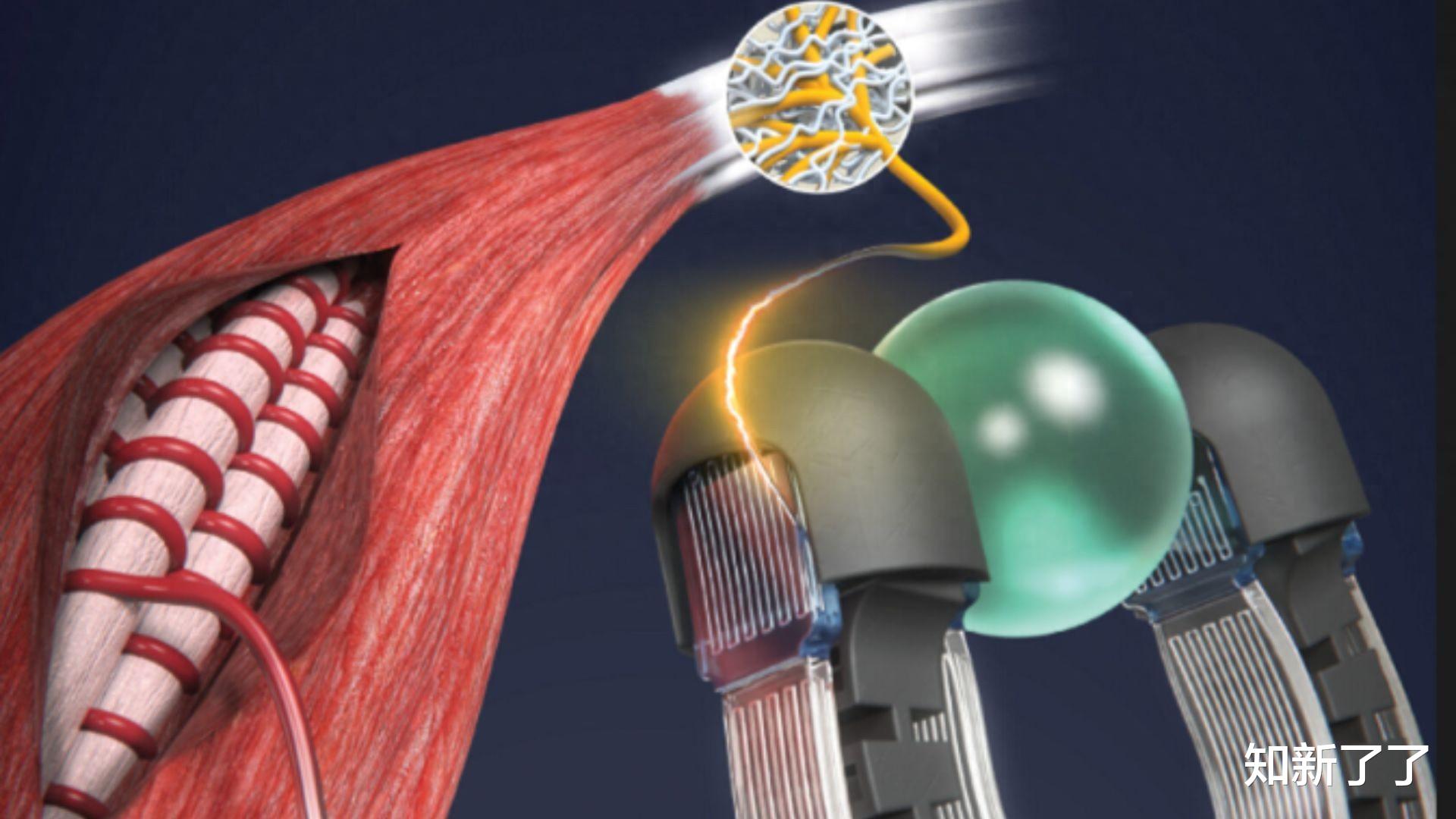
该人工肌肉将各向同性液晶弹性体和向列型液晶弹性体材料串联连接,分别发挥类似肌腱和肌肉的作用。嵌入的液态金属通道则实现双重功能:一条通道充当主动致动器,通过加热产生收缩;另一条则作为传感器,实时检测力量和形变。这使得系统无需外部传感器便能监测自身的收缩状态。
智能机器人手爪
研究人员展示了由这种人工肌肉驱动的机器人手指和手爪,它们可以轻柔地拿起物体,同时自行识别其硬度和大小。通过将两根人工肌肉以类似生物肌肉的拮抗方式排布,团队实现了更快、更精确的运动控制,包括收缩和舒张。
该系统在单一结构内融合了感知和运动功能,使人工肌肉无需依赖外部传感器便能实时监测自身状态。这为机器人赋予了一种嵌入式物理智能,使其在操作过程中能更自然地响应接触和变化的力量。研究人员证明,这些人工肌肉能够在反馈控制的机器人手指和手爪系统中协同工作,提高运动精度,减少控制误差。
该研究也指出了仍需改进的方面。在重复运动过程中,热量会在人工肌肉内部积聚,导致力输出漂移并降低精度。运动目标的突然变化也会造成跟踪误差。为解决这些问题,研究人员建议采用更快的冷却方式,包括更薄的材料、内置冷却通道或基于帕尔贴模块的冷却系统。更快的冷却能够提升响应速度和感知性能。
研究团队还指出,目前的拉伸估算模型是基于实验数据构建的,可能需要进一步改进。未来对热量分布和液晶弹性体力学行为的研究,将有助于为机器人应用开发出更精确、更可靠的人工肌肉系统。
如果朋友们喜欢,敬请关注“知新了了”!