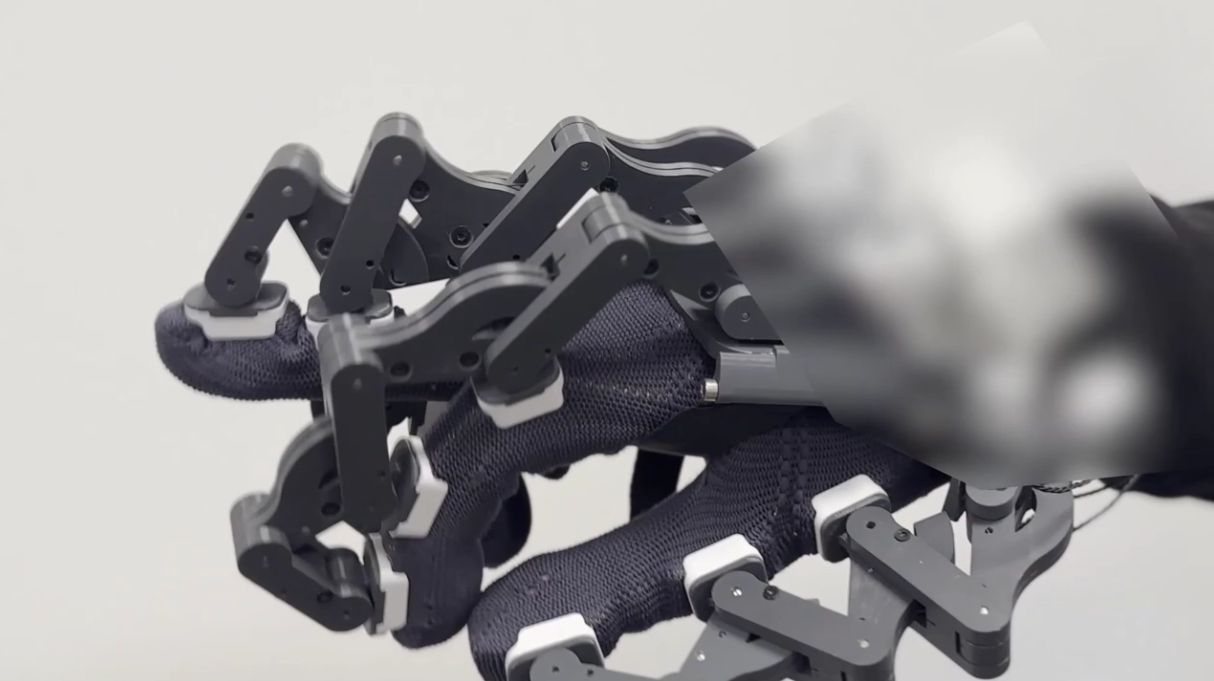
SenseGloveR1(前Rembrandt项目)
远程机器人的终极触觉手套
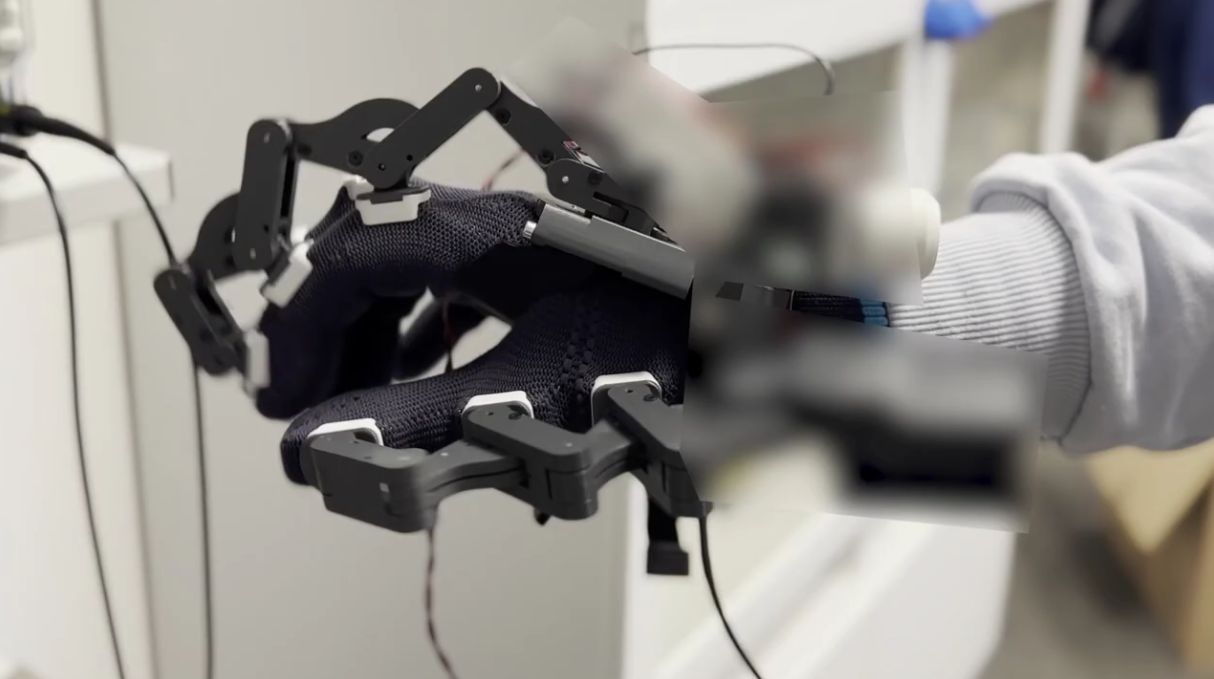
SenseGlove R1专为人形机器人手的无缝控制而设计,融合了主动力反馈、精确的力控制、毫米级精度和手指跟踪精度以及振动触觉反馈。该手套设计旨在为遥操作提供无与伦比的触觉感知和增强的模仿学习能力。
关键规格
5自由度主动力反馈
1 kHz采样速率
手指跟踪的毫米级准确度和精度
产品特点
1.具有实时压力传感的主动力反馈

1kHz的高速控制回路可将用户施加的压力直接映射到机器人手上。例如,当用户轻轻地拿起一个易碎的物体时,手套会立即调整以复制这种微妙的力,确保精确度和安全性。实时压力传感确保对物体的大小、硬度和阻力做出动态响应,增强操作的逼真度。
2.手指跟踪的毫米级准确度和精度
精确到毫米级的精确跟踪。这使得用户可以自信轻松地执行复杂的任务,如组装微型组件或执行精确的维护操作。
3.振动触觉反馈
动态振动模式提供关于接触位置、纹理和强度的即时线索。通过佩戴SenseGlove R1用户能够明显感受光滑表面和粗糙表面之间的差异,或者在虚拟手指与物体互动时收到即时警报——所有这些都是实时的。