
在游戏开发领域,3D建模是构建虚拟世界不可或缺的一部分。直接来说随着技术的进步实景扫描技术被越来越多地应用于游戏场景的创建中,以提高场景的真实性和沉浸感。这种技术通过激光扫描仪捕捉现实世界中的物体和环境,然后将这些数据转换为3D模型。其实该技术不仅应用在游戏世界更是汽车设计不可缺少的帮手。今天让我们详细聊聊激光雷达LIDAR是怎么回事。

实景扫描在游戏制作中的应用
在游戏制作中应用实景扫描技术与传统的手工建模相比可以大幅减少模型创建的时间和成本。通过扫描真实世界的场景和物体,可以在游戏中创造出更加逼真的环境。实景扫描为游戏设计师提供了更多的灵感来源,有助于创造出独特的游戏世界。:扫描得到的数据需要经过复杂的处理才能用于游戏,这包括去除不需要的元素(如《黑神话:悟空》中的钢筋)和优化模型以适应游戏引擎。其具体步骤包括现场扫描、数据处理、3D建模、纹理映射、游戏引擎集成。

可能大家觉得新奇的游戏世界3D扫描技术在汽车设计行业早有应用,当然不是很多朋友在车展上看到的皮尺测量法。基于激光的3D建模技术是汽车设计不可缺少的帮手。
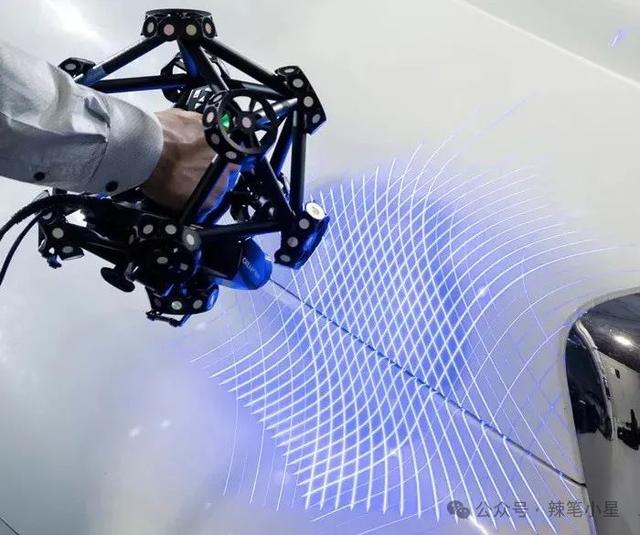
这里我们来看一个汽车行业的实例,激光3D扫描设备Metrascan 3D扫描仪广泛应用于汽车设计和制造领域。具有15个高精度激光模组的Metrascan 3D扫描仪能够覆盖从小型部件到整个车辆的扫描需求。提供高达0.05毫米的测量精度,确保扫描结果的准确性。能够在几分钟内完成复杂部件的扫描。高分辨率能够捕捉到更多的细节,精细程度高达0.025毫米的点距。便于携带和在现场使用,对于汽车制造过程中的现场测量和质量控制尤为重要。
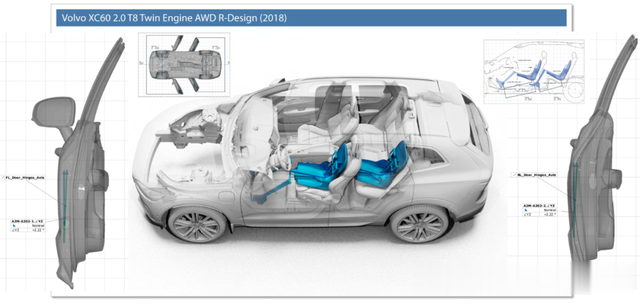
我们以竞品分析中用到的3D扫描报告为例,沃尔沃XC60插电混动版的3D扫描数据不仅可以对车门等部件进行精细扫描获得细节尺寸。而且可以对全车乃至车底底盘进行3D建模并导入CAD软件进行进一步的测量和设计。比如可以对座椅移动对乘坐空间的变化进行分析。
是不是觉得很高深难懂?我们直接看动画吧。

↑激光雷达LiDAR工作原理
通过旋转的机械镜面测量激光发出和收到回波的时间差,从而确定目标的方位和距离。由于激光雷达主动发射激光,因此受环境光变化的影响小,测距精确。
什么是激光雷达LIDAR
激光雷达LiDAR的全称为Light Detection and Ranging激光探测和测距,又称光学雷达。
激光雷达的工作原理:对人畜无害的红外光束Light Pluses发射、反射和接收来探测物体。能探测的对象:白天或黑夜下的特定物体与车之间的距离。甚至由于反射度的不同,车道线和路面也是可以区分开来的。哪些物体无法探测:光束无法探测到被遮挡的物体。
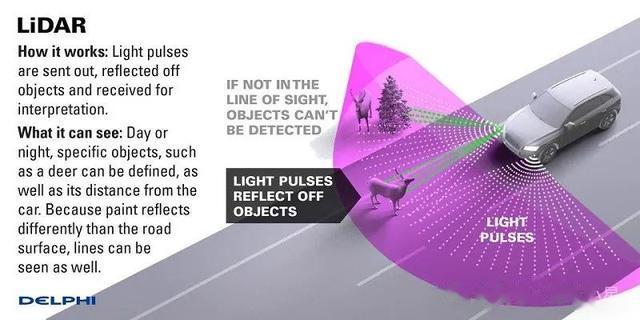
↑激光雷达LiDAR示意图
车用激光雷达工作原理就是蝙蝠测距用的回波时间(Time of Flight,缩写为TOF)测量方法。但要知道光速是每秒30万公里。要区分目标厘米级别的精确距离,那对传输时间测量分辨率必须做到1纳秒。要如此精确的测量时间,因此对应的测量系统的成本就很难降到很低,需要使用巧妙的方法降低测量难度。
什么是激光雷达LIDAR的技术关键
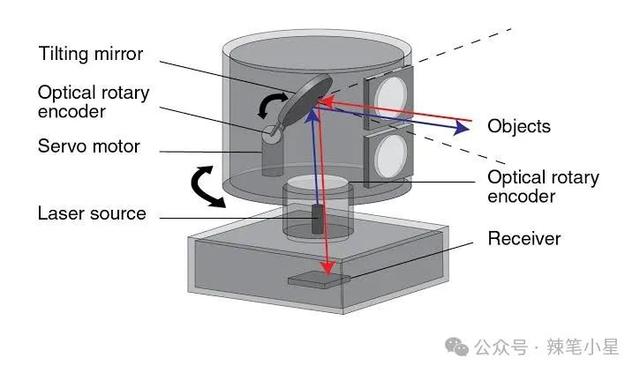
↑典型激光雷达LiDAR系统组成
典型激光雷达LiDAR系统组成括激光发射光源、接收器、伺服电机、斜面镜和光学旋转编码器(又称圆光栅)。

↑激光雷达LiDAR关键部件
激光雷达LiDAR关键部件按照信号处理的信号链包括控制硬件DSP(数字信号处理器)、激光驱动、激光发射发光二极管、发射光学镜头、接收光学镜头、APD(雪崩光学二极管)、TIA(可变跨导放大器)和探测器。其中除了发射和接收光学镜头外,都是电子部件。随着半导体技术的快速演进,性能逐步提升的同时成本迅速降低。但是光学组件和旋转机械则占具了激光雷达的大部分成本。
↑Velodyne激光雷达LiDAR基础专利
实景扫描技术为游戏开发带来了革命性的变化,它使得游戏场景的创建更加高效和逼真。尽管技术先进,但开发者仍需对扫描数据进行严格的质量控制,以确保游戏场景的准确性和专业性。随着技术的进步和经验的积累,实景扫描技术在游戏制作和汽车设计中发挥着巨大的作用。