想象一下这个场景。
2027年的一个普通工作日早晨。你开着Tesla上了高速,打开FSD,手搭在方向盘上——不,根据Tesla的最新政策,你甚至不需要手搭在方向盘上了,因为v14.3.3的DMS系统已经足够可靠,Tesla在某些区域已经允许"脱手但不脱眼"的驾驶方式了。
你放松下来,从中央扶手箱里拿出手机,看了一眼微信。就在你低头的三秒钟里,前方500米处,一辆卡车突然刹车。
你的Tesla在2.5秒之后做出了判断:驾驶员视线偏离道路,未关注前方。系统首先发出了一个视觉提醒(中控屏幕上闪了一下黄灯),同时方向盘开始轻微震动。你抬起头,看到了前方的刹车灯,踩下了刹车。
避免了一场事故。
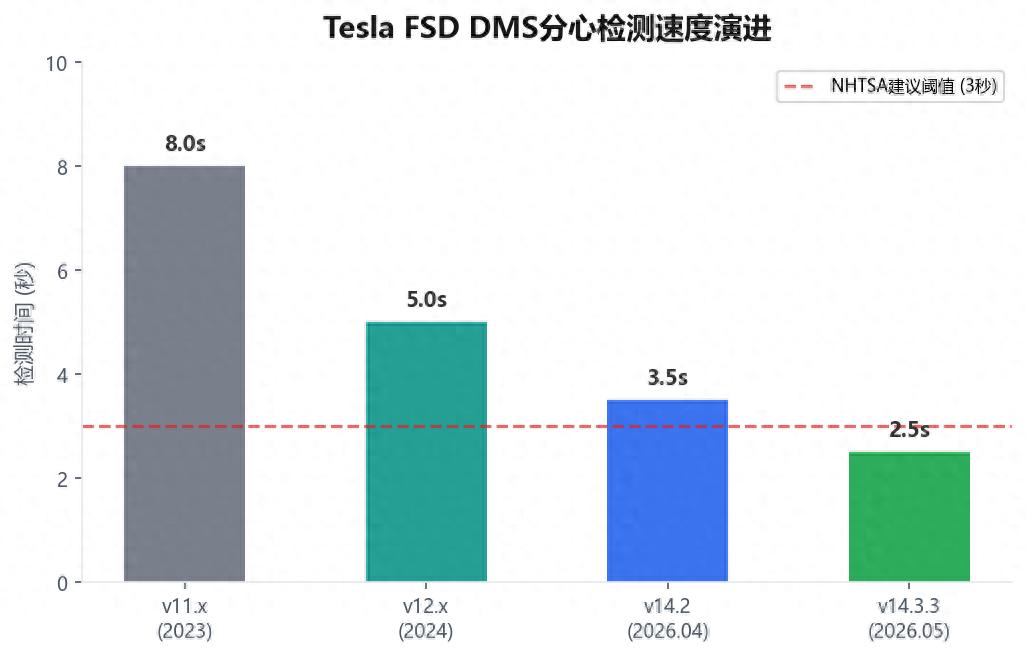
这个过程里的那个"2.5秒",就是Tesla FSD v14.3.3这次升级最核心的变化。把DMS(驾驶员监控系统)的反应时间,从之前的约5秒,压缩到了2.5秒。
这2.5秒意味着什么?我们待会算给你看。
先看v14.3.3到底改了什么
Tesla在2026年5月下旬推送了FSD v14.3.3版本,适配HW3及以上硬件的车型。这个版本最值得关注的升级,不是"又多了几条城市道路的支持",也不是"泊车更顺滑了",而是DMS系统的全面重构。
DMS,全称Driver Monitoring System,中文叫"驾驶员监控系统"。它的作用是:在FSD运行的过程中,持续监控驾驶员的状态,确保驾驶员的注意力在道路上。如果系统判断驾驶员走神了、睡着了、或者不在驾驶位上,它会发出警告;如果警告之后驾驶员仍然没有响应,系统会主动减速、靠边停车、并打开双闪。
在v14.3.3之前,Tesla的DMS主要依赖方向盘扭矩传感器——也就是说,系统通过"你有没有在转动方向盘"来判断你是不是在关注驾驶。这个方案的缺点是显而易见的:你可以在方向盘上挂一个重物(或者用小技巧欺骗扭矩传感器),让系统以为你的手在方向盘上,而实际上你可能在看手机、甚至在打瞌睡。
v14.3.3彻底改掉了这个方案。新DMS使用了舱内摄像头+红外(IR)传感器的组合,直接监控驾驶员的面部朝向、眼睛开合程度、头部姿态。系统可以在驾驶员视线偏离道路<3秒的情况下,完成"识别-判断-触发预警"的全流程。根据车主的实测数据,从视线偏离到系统发出可感知的警告,实际响应时间在2-3秒之间。
2.5秒,在高速上意味着什么?
我们来算一笔账。假设你在一辆Tesla Model Y里,以120公里/小时的速度在高速上行驶。这个速度换算成米/秒,大约是33.3米/秒。
2.5秒,就是约83米。也就是说,从系统判断你走神、到它发出警告,这中间车子又往前开了83米。
83米看起来不长,但在高速上,83米可能就是"撞上"和"没撞上"的区别。假设前车突然刹车,你的车需要大约40-60米的制动距离(取决于轮胎、路面、刹车性能)。系统如果你在走神,它帮你多争取了2.5秒=83米的反应距离——这83米,可能正好就是你避免追尾所需要的那一点额外空间。
但反过来说,如果前车是在你前方不到50米的地方突然刹停,那2.5秒可能还是不够。这就是为什么Tesla在v14.3.3里,对不同道路场景采用了不同的DMS灵敏度设置:在高速公路上,系统相对"宽容"一些(因为高速上大部分时间是稳定行驶的,偶尔看一眼手机不一定会出事);在乡村道路或者城市复杂道路上,系统的灵敏度会明显提高,因为你前方随时可能有行人、自行车、或者违规变道的车辆出现。
主观判断:2.5秒的反应时间,在工程上已经是一个非常激进的参数了。人类驾驶员在理想状态下的"感知-反应时间"大约是1.5-2.5秒(取决于注意力水平),Tesla的DMS把系统干预的阈值设在这个区间的下限,说明他们对这个视觉算法的可靠性还是相当有信心的。但如果这个算法出现误判(比如你只是在看后视镜,系统却认为你在看手机),那频繁的误报会比反应慢更让人崩溃。这方面的实际表现,还需要更大规模的车主数据来验证。
端到端架构在这里扮演了什么角色?
FSD v14.3.3的另一项重要改进,是进一步扩展了"端到端神经网络架构"的覆盖范围。简单解释一下:以前的FSD,是用模块化的方式设计的——有一个模块负责"感知"(看路),一个模块负责"规划"(决定怎么走),一个模块负责"控制"(转动方向盘)。这种设计的优点是每个模块可以单独优化,缺点是模块之间的接口会丢失信息,而且整个系统很难从全局层面做优化。
端到端架构的做法是:把"摄像头图像"直接输入一个巨大的神经网络,这个神经网络直接输出"方向盘转角"和"加速/制动指令"。中间不做人工设计的模块划分。这种方式的好处是,神经网络可以从海量驾驶数据中,自己学到人类驾驶员在各种各样的情况下是怎么反应的,然后模仿那个反应。
在v14.3.3中,这个端到端神经网络的训练数据,来自超过100万辆Tesla组成的车队。这100万辆车每天在路上跑,遇到的场景覆盖了全球几乎所有种类的道路、天气、交通状况。这些数据被送回Tesla的超级计算集群(用一万张以上的H100搭建的),用来训练端到端模型。
DMS系统和端到端架构之间的关系是:DMS负责确保"人在回路中"(human-in-the-loop),而端到端架构负责让车辆在FSD模式下的行为尽可能接近人类老司机的水平。两者加在一起,目标都是同一个:让FSD在没有人类监督的情况下,也能安全地把你从A点送到B点。
这个版本离"完全无人监督的FSD"还有多远?
Tesla自己说,v14.3.3是"向着完全无人监督FSD迈出的重要一步"。但"重要一步"和"最后一步"之间,距离可能还很远。
目前FSD仍然是一个"监督式"系统——也就是说,法律规定驾驶员必须在任何时候都保持注意力,随时准备接管。v14.3.3的DMS改进,只是在"确保驾驶员保持注意力"这件事上做得更好了,而不是"不需要驾驶员保持注意力了"。
要达到真正"无人监督"的水平,需要的不只是DMS的改进,还需要FSD在整个ODD(Operational Design Domain,运行设计域)内都能处理所有可能的场景。目前的端到端模型,在绝大多数"常见场景"下表现已经很好了,但"长尾场景"(比如前方有一个倒塌的树木挡住了整条路、比如暴雨中车道线完全看不见、比如前方有交警在用手势指挥交通)仍然是端到端模型的短板。
Tesla的应对策略是:用更多的数据来覆盖这些长尾场景。这也是为什么Tesla的车队规模如此重要——车队越大,遇到长尾场景的概率就越高,收集到的数据就越多,模型在这些场景下的表现就越好。
我的判断是:v14.3.3让FSD在"监督式自动驾驶"这个类别里又往前走了一大步,但如果要达到"无需人类监督"的水平,可能还需要2-3个类似量级的版本迭代。也就是说,2027-2028年,才有可能在某个限定区域(比如特定的城市、特定的道路类型)看到真正的"无人监督FSD"。而在全国范围内开放,可能还要更久。
最后说一句
2.5秒,是Tesla认为"系统可以在多短的时间内判断你走神"的答案。这个答案背后,是100万辆车的行驶数据、是一个基于端到端神经网络的视觉算法、是一个在HW3/HW4芯片上跑的实时推理引擎。
但这个数字的意义,不应该被误解为"有了v14.3.3,我就可以在开车时放心看手机了"。它真正的意义是:当你真的不小心走神的那2.5秒里,车会比你更快地发现这件事,并且比你更快地开始帮你避免事故。
这2.5秒不是让你走神的理由,而是你在走神时的一张安全网。
至于这张网够不够结实,6月推送后几百万公里的车主实际数据,会告诉我们答案。