当我们开车进入隧道、地下车库或高楼林立的区域时,车载导航常常会中断。对于追求完全自主驾驶的汽车来说,这是一个巨大的挑战。它们需要像人类驾驶员一样,即使在没有卫星信号指引的情况下,也能精确感知自身的位置、速度和方向,确保安全行驶。
10月13日,国防科技大学周健团队在Scientific Reports(科学报告)上发表题为A fault-tolerant sins/dual 2D-LDV tightly coupled integration scheme for autonomous vehicle navigation(一种用于自动驾驶车辆导航的故障容忍SINS/双2D-LDV紧耦合集成方案)的论文,提出了一种新型车载自主导航技术,能够在卫星信号失效的复杂环境中实现高精度、高可靠性的定位。这项研究为解决自动驾驶在隧道、城市峡谷等场景中的"失位"难题提供了创新方案。
为什么车辆在隧道里容易"迷路"?
现有车载导航系统多依赖全球卫星导航系统与惯性导航的组合。惯性导航虽然能暂时独立工作,但其定位误差会随时间迅速累积——就像蒙眼走路的人,每一步的微小偏差都会导致最终位置"失之千里"。传统解决方案中,车辆通过车轮测速仪辅助校正误差,但车轮打滑、胎压变化等因素会严重影响精度。此外,普通激光测速仪只能测量车辆前进方向的速度,无法感知垂直方向(如颠簸)和横向(如侧滑)的运动,导致高程定位不准或侧滑时产生偏差。
"双激光雷达+智能纠偏"
如何实现高精度导航?
研究团队的核心创新在于引入了两台二维激光多普勒测速仪(2D-LDV),并与惯性导航系统深度融合,并配备了一套智能的"故障检测与容错"机制。
更强大的"二维激光尺":他们改进的2D-LDV能同时测量车辆的前进速度和垂直速度。这大大减少了对"车辆不跳跃"假设的依赖,从而显著提升了高度定位的准确性。
冗余设计的"双保险":同时使用两台2D-LDV,如同为车辆装上了两把更全面的"尺子"。当一台因路面污渍、强光干扰等出现数据异常时,另一台的正常数据能帮助系统维持精度。
敏锐的"故障侦探"(LOF算法):在一个社区里,如果某个人的行为与周围大多数人格格不入,他就可能是个"异常者"。LOF算法就是基于类似原理。它通过分析当前测量数据与历史正常数据"邻居"的相似程度,来判断数据是否"异常"。这种方法对缓慢变化、微小的异常特别敏感,能有效识别激光信号失真或车辆轻微侧滑。
聪明的"智能调节器"(自适应滤波器):一旦"侦探"发现异常,系统不会简单地丢弃数据。而是根据异常的"严重程度",动态调整对问题数据的信任度:轻微异常就降低其权重,严重异常则暂时隔离它。这样就能在利用有效信息的同时,最大限度地抑制干扰。
真实路测表现卓越:170公里误差仅14米
为验证系统的可靠性,团队在两次超过170公里的实际道路测试中对比了多种导航方案。结果令人振奋:
在未预先校准系统的情况下,传统单一激光导航方案最大水平误差达57米,而双激光+LOF自适应滤波方案将误差降低至14米以内,相对误差优于总里程的万分之一(0.1‰)。这意味着行驶100公里,定位误差可以控制在10米级别。
在高度定位方面,新方案也将误差从传统方法的20米降至7.4米,有效解决了高程估计不准的难题。
与传统的故障检测方法相比,LOF算法显著降低了误报和漏报率。
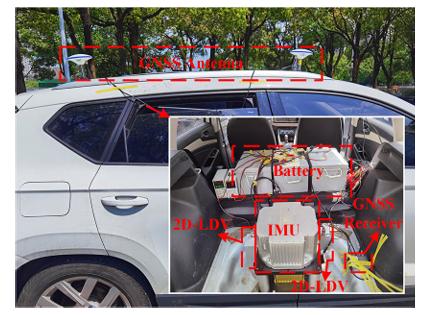
测试车辆和实验系统
应用价值:
从军用到全域自动驾驶的"定心丸"
这项技术最初面向军用车辆在无卫星信号环境下的导航需求,但其价值远不止于此。随着自动驾驶技术向全域、全场景推进,在隧道、山区、地下物流网络等信号受限区域中,这种不依赖外部基础设施的高精度自主导航能力将成为关键支撑。
它为无人货运、地下智慧物流、乃至高级别乘用车自动驾驶提供了一份可靠的"兜底"保障。随着能直接测量三维速度的激光测速仪出现,自动驾驶在完全"失联"环境下的导航能力将更加可靠。这项由中国团队主导的研究,为自动驾驶走向更广阔的应用场景增添了一份重要的技术砝码,让汽车即使在导航卫星"看不见"的时候,也能靠自己看清前路。
编辑:吴欧
论文信息
发布期刊Scientific Reports
发布时间2025年10月13日
论文标题 A fault-tolerant sins/dual 2D-LDV tightly coupled integration scheme for autonomous vehicle navigation
(DOI:https://doi.org/10.1038/s41598-025-19574-7)