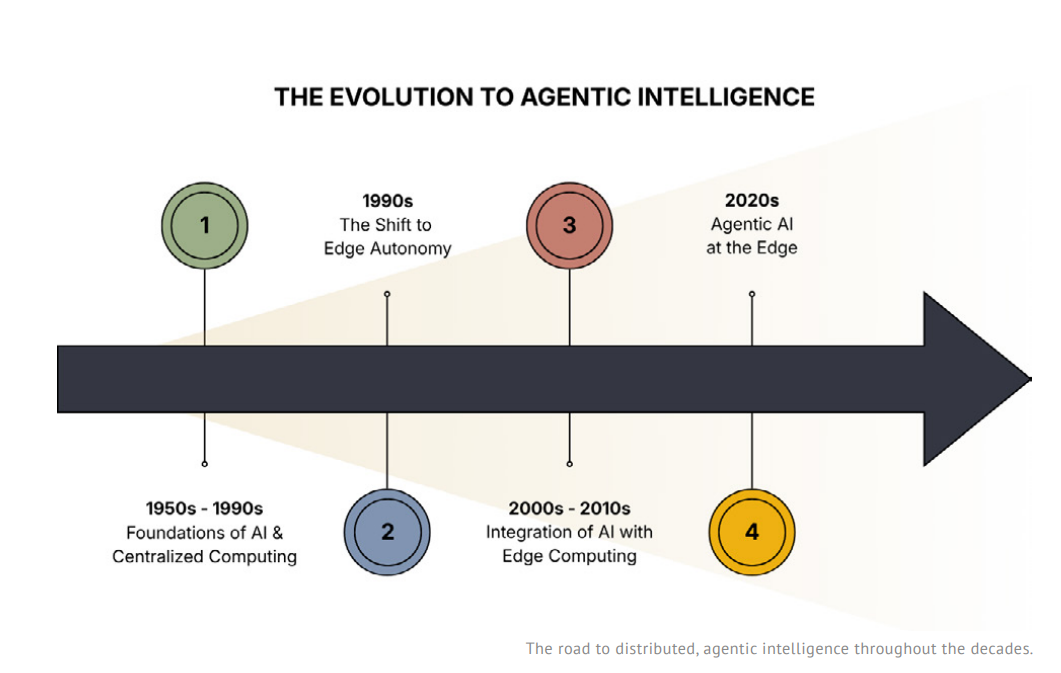
过去两年,随着大语言模型使得构建能够针对既定目标自主进行规划、推理和行动的软件智能体成为可能,人们对智能体AI系统的兴趣迅速增长。目前,这些系统大多部署在云端环境中,那里充足的算力和集中式的编排简化了开发和扩展。然而,同样的智能体范式也可应用于网络边缘,其特性和优势在重要方面有所不同。
在边缘端部署智能体AI从根本上改变了自主性的实现方式。边缘智能体不再依赖与远程基础设施的持续交互,而是在本地执行感知、推理和行动的循环。这使得无需网络往返延迟即可实现实时决策,对于安全敏感型和时间关键型应用至关重要,例如自动驾驶车辆、工业机器人在动态环境中运行的交互式机器。
边缘部署能够在有限或间歇性连接的情况下实现自主运行。在许多现实场景中——远程基础设施、移动系统或网络访问受限的工业设施——无法假设有持续的云连接。在边缘运行的智能体系统可以继续执行复杂任务、适应本地条件并独立完成任务,即使外部通信降级或不可用,也能保持功能。
隐私和数据保护是边缘智能体AI的另一项核心优势。音频、视频和生物特征信号等传感器数据可以在本地处理和存储,减少对外部网络和集中式服务器的暴露。这种本地优先的方法简化了数据保护要求的合规性,并降低了将敏感信息传输到生成该信息的设备或站点之外的风险。
从系统角度来看,边缘智能体AI也受到资源和能源限制的制约。边缘智能体通常部署在专用硬件上,如NPUs、嵌入式加速器或FPGAs,其中效率是首要设计目标。边缘智能体不依赖大型通用云模型,而是针对紧凑执行进行优化,平衡计算、内存和功耗,以便在受限环境中持续运行。
此外,基于边缘的智能体系统能够实现新型的情境感知适应和分布式协作。通过在传感器和用户附近运行,智能体可以直接响应本地条件和行为信号,实现比云中介系统更精确和相关的操作。同时,多个智能体可以在本地网络上协调,形成可扩展的分布式自主系统,这些系统本质上更具弹性。当单个智能体故障或失去连接时,其他智能体可以继续运行,使整体系统能够优雅降级并在本地恢复。
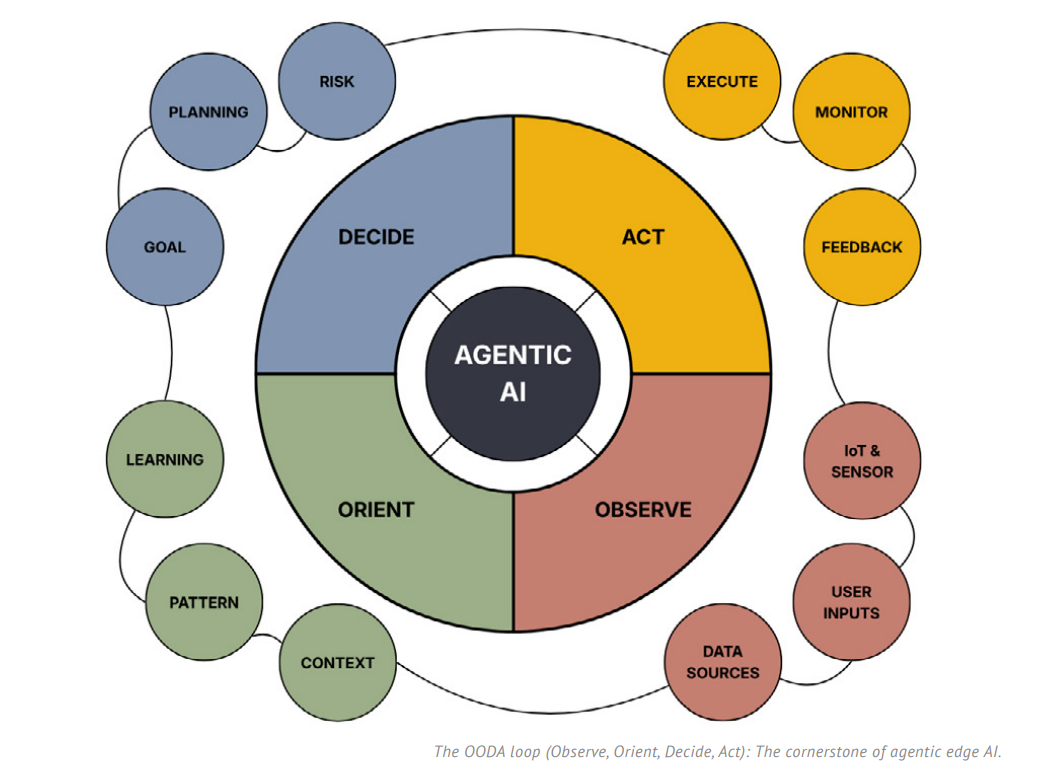
4.1. 边缘代理的架构与主要组件从功能角度来看,代理式边缘AI的基石是OODA循环(Observe观察、Orient定位、Decide决策、Act行动)。这一循环最初源于军事战略,但此后已成为现代自主系统的基础。在边缘端,该循环以微秒级时间尺度运行,使传感器输入能够通过本地感知流水线进行处理,环境状态由嵌入式模型进行解读,并通过执行器控制系统执行动作。
在实践中,边缘代理通常将传统的四阶段OODA循环压缩为简化的"感知→理解→行动"(Sense → Make Sense → Act)流程。在此结构中,"感知"阶段将多模态传感器数据(如视觉、LiDAR、雷达、音频和IoT遥测数据)聚合为统一的感知表示。"理解"阶段随后应用本地推理模型来解读上下文、预测结果并制定行动计划。最后,"行动"阶段通过直接硬件控制执行决策,范围涵盖从电机指令到通信协议。
基于OODA的架构的开发与部署依赖于一组通用的技术构建模块,包括行为树、强化学习策略和本地记忆图谱。
行为树(BTs)提供了一种模块化控制架构,用于在边缘端实现复杂的自主行为。与有限状态机不同,行为树使用选择器、序列和执行节点以分层方式组织决策逻辑。这种结构支持基于环境条件和目标优先级的动态行为切换。
现代边缘实现通常将手工编码的 BT 节点与嵌入强化学习策略的学习型动作节点相结合。这种混合方法通过结构化的控制流保持安全保障,同时允许自适应行为。控制屏障函数(Control Barrier Functions)可用于将强化学习动作约束在安全状态空间内,确保自主代理即使在探索过程中也能遵守操作边界。
4.1.2. 强化学习策略部署在边缘的强化学习(RL)策略通常用于在不依赖云连接的情况下,实现对本地条件的持续适应。这些策略在由安全约束、硬件限制和任务参数定义的有界动作空间内运行。
本地内存系统缓存策略权重、经验缓冲区和环境模型,支持推理和有限的在线学习。将 RL 与行为树集成可产生模块化学习架构,其中各个 BT 节点根据本地经验调整其策略,同时通过树的结构约束维持整体系统安全。这种设计实现了优雅降级:如果学习到的行为失败,系统可以在同一树内回退到手工编码的替代方案。
4.1.3. 本地记忆图本地记忆图为边缘代理提供持久化知识基底。这些结构在代理的操作域内维护实体、事件和动作之间的语义关系。与基于云的知识图谱不同,边缘内存系统针对低延迟访问模式和低功耗存储进行了优化,通常利用新兴内存技术,如 MRAM 和 FeRAM。
记忆图支持用于经验重放的情景记忆、用于概念关系的语义记忆,以及用于技能获取的程序性记忆。其基于图的结构能够在决策过程中实现高效的上下文检索,使代理在遇到新情况时能够借鉴历史经验和学习到的关联。
使用 RISC-V 解锁边缘 AI 的极致效率
边缘 AI 正在迫使人们重新思考计算平台的设计方式。虽然许多 AI 突破仍然源自数据中心,但这些系统背后的假设很少能在边缘环境中适用。电池供电设备、安全关键型机器和长生命周期工业系统所要求的效率、确定性和成本控制水平,是超大规模架构从未被设计用来提供的。随着智能越来越接近物理世界,边缘平台必须从头开始以不同的方式构建架构。
从 MIPS 的角度来看,挑战不仅仅是缩小 AI 模型以适应更小的设备。边缘平台必须优先考虑能效、可预测行为和可扩展性,同时支持快速演变的工作负载。客户不再满足于针对单一代模型优化的固定功能硬件。相反,他们要求开放、模块化的平台,能够随着软件和 AI 框架的演变而适应。功耗效率、确定性和安全性现在已是基本要求。真正的差异化在于平台能否随时间扩展以支持软件定义的工作负载。
这一转变正在重塑边缘芯片的构建方式。RISC-V 因其开放和可扩展的特性而发挥着核心作用。RISC-V 无需继承数十年的遗留指令和架构开销,允许平台设计者仅采用特定应用类别所需的内容。这种灵活性使得架构能够针对特定边缘工作负载进行优化,同时仍与通过 RISC-V International 协作开发的行业标准保持一致。对于边缘 AI 系统,这种开放性与专业化之间的平衡比封闭的通用设计实现了更高的效率。
指令集灵活性直接转化为实际收益。感知流水线在推理开始之前通常会处理多个具有不同带宽、时序约束和数据类型的数据流。通过识别这些工作负载中受益于硬件加速的部分,并通过针对性指令支持它们,设计者可以在不增加面积或功耗预算的情况下提高性能。控制回路以类似方式受益,其中对三角函数和数学运算的专用支持可以提高精度和响应速度。以这种方式扩展处理器通常比组装复杂的卸载 IP 链更高效且更易于集成。
效率提升还来自于去除不必要的开销。AI 模型和框架演变迅速,僵化的硬件可能在产品达到其使用寿命之前很久就过时了。通过利用 RISC-V 的模块化方法并与现代 AI 软件生态系统保持一致,边缘平台可以在新模型出现时保持适应性,而无需进行昂贵的硬件重新设计。
这一架构转变的基础是一种软件优先的思维模式。软件优先设计不是将软件视为适应成品芯片的东西,而是从理解工作负载开始,并围绕它塑造平台。对于边缘 AI 开发者来说,这意味着在开发周期更早的阶段开始优化。虚拟平台允许软件团队在芯片存在之前进行实验、分析和压力测试工作负载,在架构反馈仍可纳入时发现约束和机会。借助 MIPS Atlas IP 核心模型等工具,软件团队可以在芯片前参与,加速上市时间,同时提高效率并降低开发风险。
这种方法在机器人、车辆和工业机器等物理 AI 系统中尤为重要。这些平台必须将 AI 推理与实时控制和安全关键行为相结合。在这些系统中,确定性不仅适用于传感器和控制路径,而且越来越适用于 AI 决策延迟本身,其中不可预测的推理时序可能破坏安全操作。增加自主性会增加工作负载复杂性,并提高架构失误的成本。硬件/软件协同设计在此类系统中一直很重要,但 AI 的整合使其比以往任何时候都更加关键。确定性行为、任务关键可靠性和不断演变的 AI 工作负载现在在同一平台上交汇,几乎没有低效率或后期重新设计的余地。
展望未来,架构效率将比原始计算能力更重要。随着边缘系统变得更加自主,基于开放标准、软件优先原则和严格协同设计构建的平台将最能适应。在这种情况下,RISC-V 作为构建高效、可适应且与物理、长期部署现实相一致的边缘 AI 系统的基础。这些原则构成了更高级别自主和自适应边缘系统构建的基础。
4.2. 边缘端 Agentic AI 的硬件架构与计算基础设施边缘代理的部署和运行对性能提出了严格要求,需要专门的硬件架构和能力,范围涵盖多核片上系统(SoC)到现场可编程门阵列(FPGA)和确定性微控制器单元(MCU)。
4.2.1. 多核 SoC 与异构处理边缘端的 Agentic AI 系统需要异构计算架构,在多核 SoC 内融合多种处理范式。这些平台通常集成 Arm Cortex 核心用于控制逻辑、神经处理单元(NPU)用于推理负载、数字信号处理器(DSP)用于信号处理,以及 GPU 用于并行计算,所有组件都在严格的功耗限制内运行。
此类异构设计实现了跨计算领域的任务专业化。感知和推理负载映射到 NPU,实时控制回路在确定性核心上执行,规划或协调任务则在通用处理器上运行。此外,电源门控和动态电压频率缩放(DVFS)机制通过仅激活给定操作模式所需的子系统来优化能耗。
4.2.2. FPGA/DSP 控制回路与确定性处理FPGA 和 DSP 核心提供确定性执行特性,这对安全关键的自主系统至关重要。这些处理器执行控制算法时具有保证的时序行为,确保执行器命令在定义的延迟范围内交付,无论整体系统负载如何。
基于 FPGA 的控制回路非常适合实现模型预测控制、自适应滤波和实时优化算法,精度达到微秒级。这种确定性处理补充了神经网络推理的概率特性,形成混合系统,将 AI 的适应性与控制理论方法的可预测性和保证相结合。
4.2.3. 确定性 MCU(微控制器单元)与实时约束确定性 MCU 用于处理需要保证响应时间的关键时间功能。这些处理器依赖于中断驱动架构和基于优先级的调度来支持安全关键操作,使其能够在必要时抢占低优先级的 AI 工作负载。
边缘代理通常采用双核或多域架构,其中确定性 MCU 管理实时控制和安全监控,而更高级别的处理器则处理 AI 推理和规划任务。这种分离确保了自主决策不会损害基本安全功能,即使在高计算负载下也是如此。
4.3. 边缘代理的软件框架和开发平台边缘代理式 AI 的开发和部署也依赖于适当的软件框架,特别是那些支持性能、自主性和安全要求的框架。此类框架提供了在受限和分布式条件下构建、部署和运行边缘代理所需的工具。以下是一些用于开发边缘代理系统的最著名软件框架。
4.3.1. ROS 2 规划器与机器人中间件ROS 2 为边缘机器人系统提供了分布式中间件基础。其基于 DDS(Data Distribution Service)的架构实现了感知、规划和控制节点之间的实时通信,同时也为延迟敏感操作支持服务质量保证。
ROS 2 规划器实现了运动规划、路径优化和行为规划算法,并越来越强调针对边缘部署的优化。这些规划器与本地传感器融合管道和执行器控制系统紧密集成,实现了无需依赖持续云连接的自主导航。此外,ROS 2 还包括生命周期管理功能,支持受控启动和关闭、错误恢复以及自主行为的动态重新配置。这些功能在边缘部署中尤为重要,因为在这些场景中人工干预可能有限或不可用。
4.3.2. AWS(Amazon Web Services)Greengrass Lambda 函数AWS IoT Greengrass 通过支持本地执行 Lambda 函数,将云原生计算模型扩展到边缘设备,符合无服务器计算原则。这些函数允许业务逻辑、数据处理和机器学习推理直接在边缘硬件上运行,同时保持可选的云连接以进行管理和更新。
Greengrass Lambda 函数支持本地消息传递、数据缓存和离线操作,使自主系统能够在网络中断期间继续运行。该平台还提供车队管理功能,用于部署更新、监控系统健康状态以及管理大量分布式边缘代理。
在实践中,Greengrass 函数在代理式 AI 应用中用于实现决策逻辑、策略执行以及多代理系统的协调机制。无服务器执行模型允许计算资源根据工作负载需求进行扩展,同时保留在云连接不可用时自主运行的能力。
4.4. 边缘行为的数字孪生仿真与虚拟测试在边缘部署 agentic AI 基础设施需要彻底的验证和测试。在此背景下,数字孪生仿真为开发和评估自主边缘行为提供了虚拟环境。这些高保真仿真复现物理环境、传感器特性和系统动力学,使自主代理在真实世界部署前能够进行逼真的测试。
在实践中,边缘代理可以维护运行时数字孪生,镜像其物理状态和运行环境。这些孪生体支持预测建模、场景探索和性能优化,通过实现本地化的"what-if"分析而不影响实时运行。此外,可以应用 simulation-to-reality transfer 技术,确保在数字环境中验证的行为能够可靠地转化到物理系统。这种方法通过在仿真阶段暴露 edge cases 和 failure modes 来缩短开发周期,在需要昂贵的物理测试和部署之前就发现问题。
边缘代理的自主运行引发了重大的安全和责任考量,需要能够实现审计、问责和受控干预的机制。为满足这些要求,边缘代理通常设计有一组约束和支持性保障措施,以规范自主性在真实世界环境中的行使方式。
4.5.1. 有界动作空间与运行约束边缘自主系统在有界动作空间内运行,这些空间源自安全要求、任务参数和部署平台的物理限制。这些边界在多个层面强制执行,包括 control barrier functions、reachability analysis 和 runtime monitoring。动作空间约束通常是动态的,会根据环境条件、系统状态和任务阶段进行调整。
例如,自动驾驶车辆可能会在恶劣天气条件下降低允许速度,或根据本地感知输入限制在施工区域附近的车道变更。分层约束框架进一步支持具有不同自主程度的不同运行模式。紧急模式可能将动作限制为基本安全操作,而正常运行则在预定义的任务限制内允许更广泛的自主性。
4.5.2. 操控手柄与人工干预边缘代理必须提供明确的人工监督和干预机制。大多数系统实施分级自主,允许操作员在多个层面进行干预,从高级目标调整到直接执行器控制。超控检测系统监控多种模式的人工输入,包括物理开关、语音命令、手势识别和移动界面。
从自主控制到手动控制的转换必须以可预测和安全的方式发生,以避免可能引入危险的突然行为变化。此外,watchdog 机制持续监控代理行为是否存在异常、性能下降或约束违规。当检测到此类情况时,系统可能会请求操作员注意或启动预定义的安全回退行为。
4.5.3. 责任日志记录与审计跟踪(Liability Logging and Audit Trails)边缘端的Agentic AI系统受益于强大的日志记录基础设施,该基础设施能够维护详细的审计跟踪,用于责任管理和监管合规。这些日志记录传感器输入、内部推理状态、动作选择和观察到的结果,通常由密码学完整性机制进行保护。与以云为中心的系统相比,基于Edge的日志记录引入了额外的复杂性,因为它必须平衡存储限制、数据保留策略和隐私考量。事件触发式日志记录、分层压缩和选择性数据保留等技术常被用于在管理有限的设备端资源的同时,保存关键的决策记录。
4.5.4. 可解释性AI(XAI)技术可解释性是边缘端可信Agentic系统的一个组成部分。XAI技术提供人类可理解的自主决策解释,支持事后分析、系统调试和持续改进。通过将高层决策与底层传感器数据和推理过程相链接,可解释性机制增强了问责制,并促进了对自主行为的知情监督。
在实践中,Agentic Edge系统中的可解释性必然是选择性的和事件驱动的。与可以应用计算密集型的后验可解释性方法的云基AI不同,Edge Agent在延迟、功耗和内存方面受到严格限制。因此,解释通常在异常、故障、覆盖或安全相关事件期间触发,而不是持续生成。轻量级技术(如嵌入式特征归因、实时显著性信号或基于规则和概念的抽象)使Agent能够在不损害实时性能的前提下呈现有意义的解释。
对于在较长时间内自主运行的Agentic系统,可解释性还作为一种问责和可追溯性机制。解释使得重建Agent为何选择特定行动方案、哪些输入或情境因素影响了该决策,以及内部置信度或不确定性如何随时间演变成为可能。这种能力对于诊断故障模式、验证安全关键环境中的Agent行为,以及随着自主性提高而维持人类信任至关重要。
总体而言,Edge Agent的开发和部署引入了一组独特的技术和运营要求。满足这些要求需要专用硬件、强大的软件框架、通过数字孪生进行的仿真驱动测试以及面向安全的系统模块的融合。这些要素共同构成了自主边缘智能的基础,使其不仅具备能力,而且可审计、可控制、可信赖。
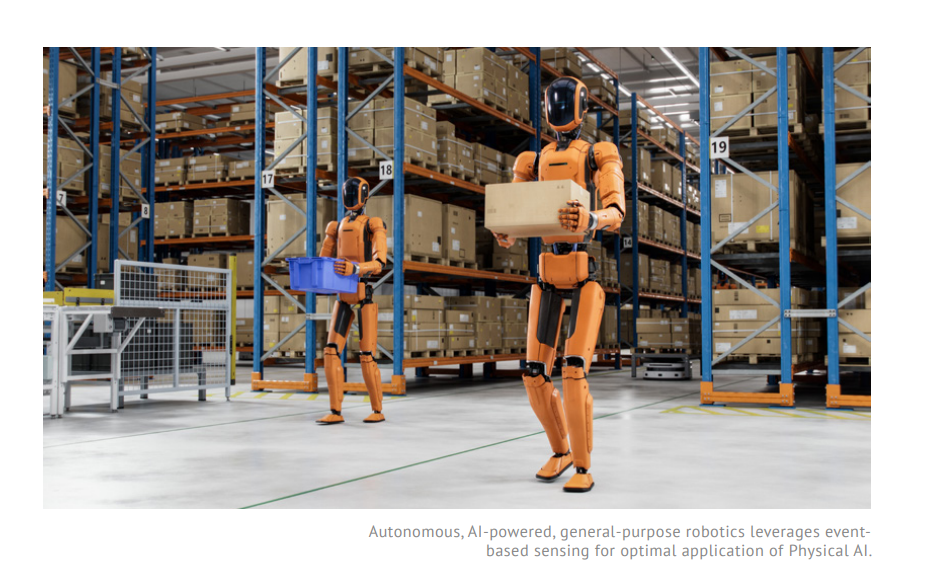
第五章:Physical AI 与 Embodied AI"Physical AI的'ChatGPT时刻'即将到来,"英伟达(NVidia)的黄仁勋在今年早些时候的CES 2026上表示。这一言论捕捉到了一个更广泛的转折点——AI正从屏幕走向物理世界。Physical AI——在某种程度上也包括embodied AI——指的是这样一种系统:其中的智能超越了代码,存在于能够在现实世界中移动、感知和决策的机器之中。机器人、无人机和自动驾驶车辆必须持续解读多模态感官输入,在严格的延迟约束下做出决策,并在严格的功耗和热限制内执行动作。与基于云的AI不同(在那里规模可以掩盖低效),具身系统受限于物理定律。
当前这一波浪潮的独特之处不在于原始模型能力,而在于可行性。过去需要成排GPU的任务,如今越来越多地在几瓦的嵌入式计算中完成,这得益于模型效率、硬件加速和系统级协同设计的进步。这一转变使得Physical AI系统能够长时间自主运行,无需持续连接或高昂的能源预算。
作为这一转型的一部分,最近的研究较少关注最大化吞吐量,而更多关注最小化不必要的计算。目标是仅在信息变化时感知和行动,而不是以固定速率处理每个信号,从而最小化冗余处理。事件驱动传感、稀疏表示和紧密耦合的感知-行动循环正成为核心设计原则。这些方法共同推动边缘AI走向一种物理智能形式,这种智能在构建上高效、在部署上可持续,不再受限于传统假设。
感知影响着具身系统对其环境的认知。传统的相机流水线依赖于密集的逐帧采样和卷积推理,但最新的方法强调基于事件的传感和多模态融合,以实现低功耗、低延迟的感知。
5.2. 控制与学习:从 PID 到 Policy一旦机器人感知到其环境,就需要对其采取行动。在系统控制方面,工程师历来采用比例 - 积分 - 微分(PID)回路,它以有限的适应性为代价,以其可靠的反馈和低延迟而闻名。新的架构现在将 PID 的稳定性与强化学习(RL)的自适应决策能力相结合。
5.3. 具身智能的 Compute每个具身系统背后都面临着同时实现高推理性能、确定性延迟和低热足迹的挑战。
综合所有进展,计算硬件显然开始将效率与自主性等同起来。功耗更低的机器人可以运行更长时间,携带更小的电池,并实现更可持续的部署生命周期。

具身人工智能最深刻的进展涉及模拟和终身适应。具体而言,机器人研究人员正在弥合数字领域与物理领域之间的"现实差距",让机器人在面对真实世界之前,能够在模拟环境中进行训练、失败和重新学习。
在实践中,这些循环帮助机器人在无需完全人工监督的情况下调整其模型。家庭助理机器人可能能够自主学习新的楼层平面图,而工业机器人可以适应变化的传送带速度。随着人工再训练干预的减少,系统经历的硬件磨损更少,设计者可以更大规模地部署自适应 AI。
5.5. 安全、信任与绿色机器人仅靠效率和适应性是不够的。具身AI在人类环境中运行,信任、安全和隐私在决定其采用方面与性能同等重要。
安全、隐私和可持续性现在已成为负责任具身化的代名词。智能应在其环境中有效行动并以道德方式行事。
5.6. 迈向自适应物理智能物理AI正在告诉更广泛的Edge AI社区,智能源于约束。在更少瓦特和更少比特下运行的系统迫使设计师优先考虑相关性、效率和弹性。通过这种方式,具身AI既是可持续Edge AI的试验场,也是蓝图。它表明,机器智能的下一个时代将以负责任的方式适应其环境。
第六章:边缘 MLOps 与编排现代企业日益在数据、连接性和智能的交汇点上运营,许多用例要求模型在靠近数据生成的位置运行。因此,边缘机器学习操作(MLOps)范式已作为一种架构和运营框架应运而生,使这一转变成为可能。它将云级自动化、网络智能和边缘弹性结合在一起,确保 AI 工作负载长期保持高性能、安全性和可信度。
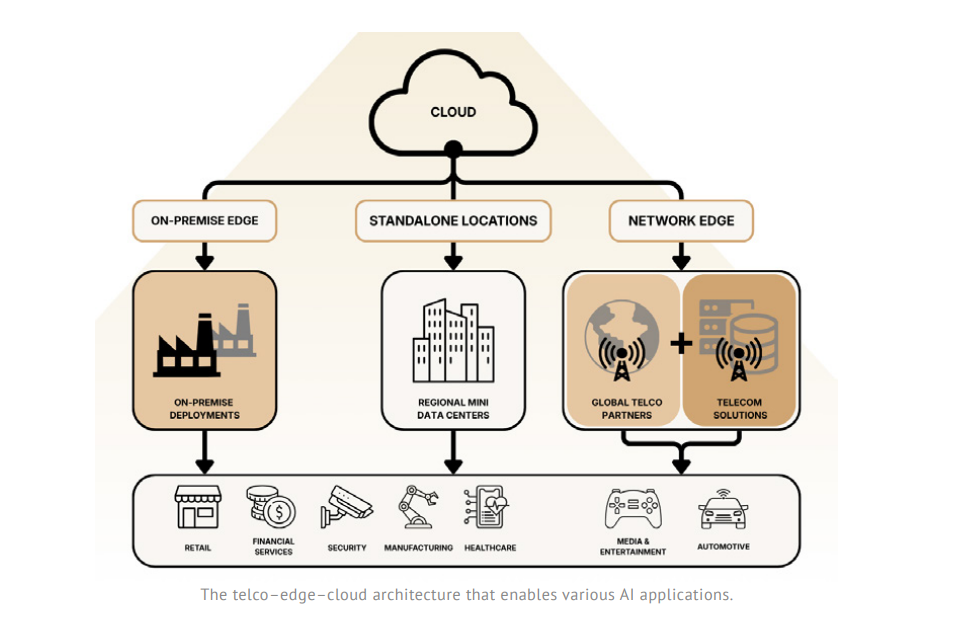
边缘模型和基础设施资源的编排也是不断发展的电信和云格局的核心。电信行业正在经历结构性转型,逐步将网络转变为智能化、云原生和 AI 驱动的生态系统。这种电信商—边缘—云的融合将多个计算层级——集中式云、区域边缘和本地迷你数据中心——整合为一个统一的连续体。可靠地运营这一连续体取决于对异构边缘资源的有效编排。最近的技术进步现在提供了多种方法,用于在这个分布式边缘架构上编排模型、数据和计算资源。
过去几年中,电信和云运营商越来越多地利用融合的电信-边缘-云架构来托管下一代应用,例如私有5G分析、AR/VR服务和低延迟工业AI。在这种部署模式下,面向电信的大型语言模型(LLM)正作为专用系统涌现,这些系统基于网络遥测、运营数据和客户交互信号进行训练。这些模型支持多种用例,包括自动故障排除、网络优化和客户关怀。
支持AI的编排平台解释这些意图,并自主将其转化为跨计算、内存和网络层的资源分配决策。持续的策略反馈循环将当前系统状态与声明的意图进行比较,并实时调整部署以消除任何差距。这种自适应方法提高了在负载、连接性和设备健康状态动态变化的环境中的弹性。随着时间的推移,预计电信公司和工业运营商将越来越依赖意图驱动编排来简化大规模边缘运营,并以最少的人工干预保持一致的服务质量。
6.2. 容器化端点和集群管理通过容器和编排器实现标准化已成为可扩展边缘运营的基础。诸如 NVIDIA Fleet Command 和 Zededa Edge orchestrator 等产品使企业能够在数以万计的设备上部署、保护和监控 AI 模型。
6.3. 遥测、漂移检测和基于策略的部署现代边缘 MLOps 管道还依赖于遥测来管理分布式推理。为此,它们利用遥测仪表板来聚合资源利用率、模型准确性、能耗和延迟等指标。这些洞察使漂移检测成为可能,这是一个至关重要的过程,用于识别数据输入或预测模式何时偏离其训练基线。同时,基于策略的部署确保只有经过验证的模型更新才会传播到生产节点。相关的验证标准包括最低测试分数、监管验证和资源阈值。此外,采用自动化门控来降低运营风险,并建立模型生命周期事件的不可变审计记录。
6.4. OTA 模型 CI/CD、A/B 测试和回滚除了基于 AI 的编排技术外,边缘 MLOps 方法还可以从完全自动化的 over-the-air (OTA) 模型管道中受益,这确保边缘模型能够持续重新训练和重新部署而无需停机。在这些方法的范围内,更新从集中式 MLOps 管道安全地流向分布式节点,在激活之前通过完整性检查验证真实性。这产生了边缘端有效且自动化的 CI/CD 管道。
6.5. 过时模型、信任和治理集成模型退化(即"过时")是边缘 AI 最重要的运营风险之一。在数据快速变化的动态边缘环境中,即使是高性能模型也可能在数周内失去准确性。嵌入企业 Trust Stack 的治理系统通过版本跟踪、血缘监控和合规性挂钩来降低此风险。具体而言,Trust Stack 集成提供了从原始数据源到设备端推理的可追溯性。它对每个模型版本强制执行问责制,将其与认证检查、道德准则和网络安全审计相关联。Trust Stack 通常辅以持续验证管道和自动退役策略,以确保边缘模型集群保持有效、安全、透明和可审计。
6.6. 边缘数据管道和选择性数据上传边缘 MLOps 不仅依赖于编排模型,还依赖于管理数据如何在边缘 - 云连续体中移动。与以云为中心的管道不同,边缘部署必须在带宽、存储和连接性的约束下运行。因此,现代边缘系统依赖于选择性数据管道,以确定哪些数据本地保留,哪些数据上传到上游。
展望
边缘 MLOps 的下一阶段将强调模型、数据和基础设施之间的自适应协调,编排系统将通过意图感知策略、选择性更新和持续反馈来响应不断变化的条件。新兴架构并非向外扩展云控制,而是将边缘视为具有自身治理边界和自主权的一级执行环境。组织如何有效地管理这一转变,将决定在网络边缘运行的 AI 系统的弹性、可扩展性和长期可靠性。
第七章:连接与协作学习现代连接性正日益超越简单的数据传输,成为边缘协作学习的基石。主流网络技术,如5G、Wi-Fi和Bluetooth,如今与边缘原生范式相结合,包括多接入边缘计算(MEC)、联邦学习、群体智能和零信任安全。这些层级共同使分布式设备组能够在网络边缘进行学习、协调和集体行动。
在这一格局中,5G为增强移动宽带、大规模机器类型通信和超可靠低延迟通信(URLLC)提供了骨干支撑,而Wi-Fi和Bluetooth则支持高吞吐量本地连接和节能的设备间交互。这种组合将车辆、传感器和机器人转变为协作且保护隐私的分布式智能网络。在此类环境中,边缘设备不仅交换数据,还共享模型更新、策略和语义上下文,从而实现集体感知、规划和控制,而无需依赖集中式云协调。
MEC 将计算资源部署在靠近基站、接入点或工业网关的位置,使得计算任务可以在终端设备和附近的边缘服务器之间动态分割。在分割计算架构中,AI 模型的早期层可以在设备上执行,而更深层则在边缘运行,或在适当时在云端运行。这种划分使系统能够平衡延迟、带宽使用和能耗,使其特别适合协作式边缘 AI 场景。
车联网(V2X)环境为这一范式提供了具体实例。车辆、路侧单元和基础设施节点交换本地检测到的物体、占用网格或压缩传感器特征,以构建共享的情境感知。MEC 节点将这些局部视角融合成更完整的场景表示,超越任何单一车辆独自感知的能力。由此产生的联合感知随后可重新分发给附近的参与者。实现这一点需要在分割计算与网络感知决策之间进行紧密协调,确保在严格的延迟和带宽限制下仅交换最相关的信息。
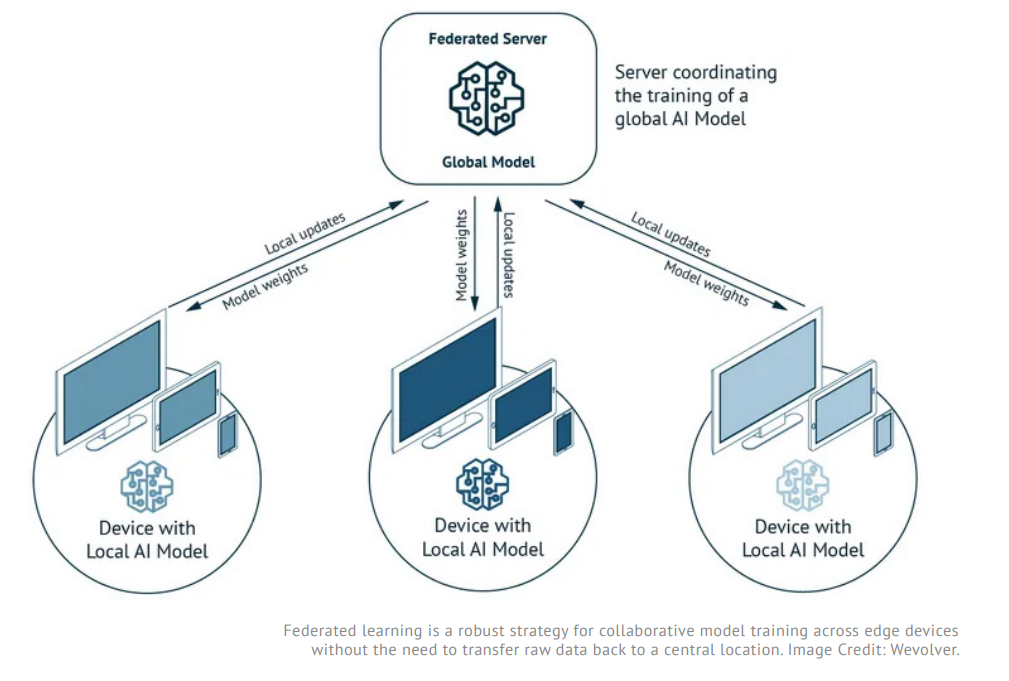
7.2. 面向异构边缘设备的联邦学习
联邦学习(FL)提供了另一种在边缘侧广泛采用的协作框架。其核心原则是将模型训练与原始数据共享解耦。在广泛使用的联邦平均(FedAvg)方法中,每个设备(例如车辆、传感器或智能手机)在其私有数据上训练本地模型少量 epoch,然后将权重更新发送给聚合器,如 MEC 部署中的边缘服务器。聚合器对这些更新进行平均并重新分发全局模型,该模型逐渐捕捉所有参与设备的模式。
为了保护隐私,联邦学习融入了诸如差分隐私(DP)等机制,其中在聚合之前向模型更新添加校准噪声。这使得从全局模型或中间梯度推断单个设备的贡献在统计上变得困难。在协作边缘部署中,DP 补充了安全聚合和加密,允许设备车队联合训练感知或通信模型,同时符合监管、隐私和道德要求。
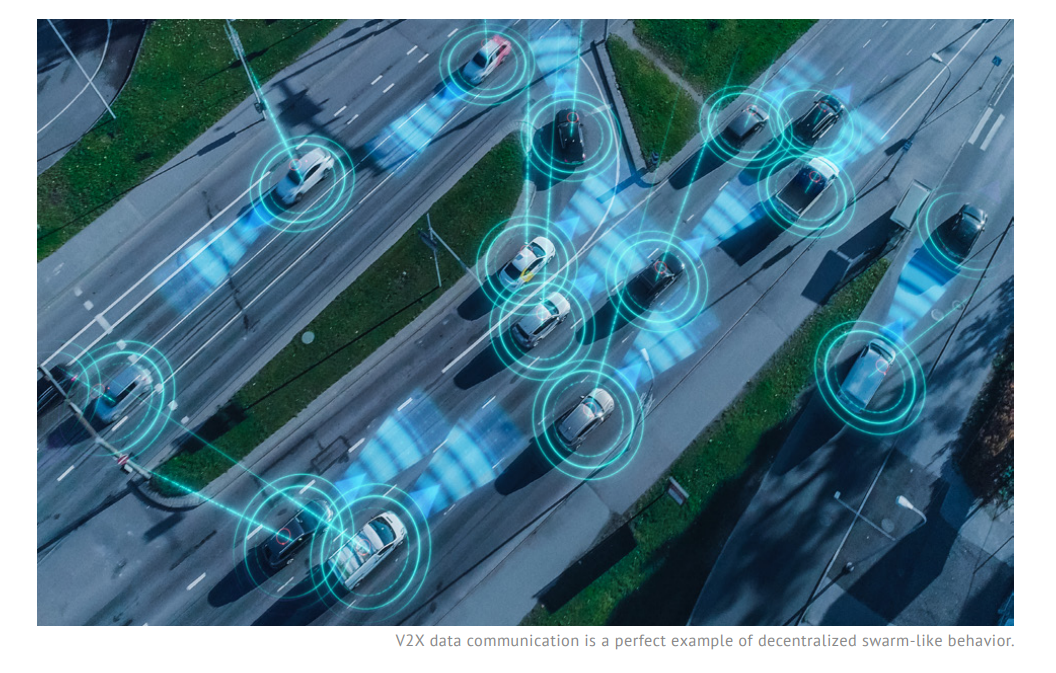
7.3. 群体学习与强化学习地图
联邦学习围绕中央(或半中央)聚合器实现参数共享,这使其基于集中化概念。为了缓解集中化的局限性(例如单点故障),群体学习和群体强化学习(RL)强调许多代理之间的去中心化协调。在群体 RL 场景中,每个不同的代理/对象(例如无人机、机器人或车辆)学习导航、搜索或协调的策略,同时与附近的同伴共享部分经验、价值地图或占用地图。
这一范式的突出应用出现在 V2X 和智慧城市环境中,其中群体行为使车辆、交通信号灯和基础设施之间的协调成为可能,以优化交通流和系统弹性。虽然边缘服务器仍可提供全局一致性或高级指导,但大部分适应是通过本地通信直接在代理之间发生的。结果是一个从完全去中心化的群体到半中心化联邦群体的频谱,其中 MEC 节点充当支持策略聚合和重新分发的"蜂巢"。
硬件正日益针对连接性与学习之间的相互作用进行优化。AI-modem combo 芯片(由 EdgeQ 等公司率先推出)将 5G 基带处理、RISC-V 计算和 AI 加速集成到单个 system-on-chip (SoC) 中。这种融合模糊了无线电协议栈与 machine learning (ML) 流水线之间的传统界限,实现了诸如 PHY 感知调度、用于链路自适应的端侧推理,以及路由与模型压缩的联合优化等功能。
Wi-Fi 6/6E 和 Wi-Fi 7 在室内环境中补充了这一模式,提供诸如 OFDMA (Orthogonal Frequency Division Multiple Access)、MU-MIMO (Multi-User, Multiple-Input, Multiple-Output) 和确定性调度等特性。这些能力共同在工厂、医院和园区网络中实现了准 URLLC 行为。Bluetooth(包括 Bluetooth Low Energy (BLE) 和定位功能)支持可穿戴设备、传感器和微控制器之间的低功耗协作,而聚合及计算密集型的学习任务则卸载到附近的 edge hub 或 gateway。
除了原始连接能力之外,面向消息的中间件(如 Message Queuing Telemetry Transport,MQTT)和 Data Distribution Service(DDS)为协作学习工作负载提供了所需的抽象层。MQTT 提供轻量级的发布/订阅消息传递机制,支持主题(topics)、QoS 级别和保留消息,使其非常适合资源受限的 IoT 设备,这些设备会定期发布传感器数据、模型更新或异常警报。其低开销和基于 broker 的设计与 MEC 架构高度契合,其中 broker 位于边缘,靠近发布者和订阅者。
7.6. 用于协作学习的零信任网络协作学习技术需要安全架构,将网络的任何组件都不视为固有可信。零信任网络在设备、服务和数据流之间强制执行强身份验证、持续认证和最小权限访问。在实际的边缘学习场景中,这意味着车辆、机器人、传感器和其他智能对象必须与 MEC 平台进行身份验证,证明其完整性,并在发送或接收模型更新之前获得明确授权。
7.7. 梯度泄露缓解与隐私保护协作即使零信任架构已到位,梯度和模型更新仍可能泄露有关底层训练数据的信息。例如,梯度反转攻击已证明,敏感样本有时可以从共享的更新中重建,尤其是在早期训练轮次或模型高度过参数化时。为了缓解这些风险,边缘协作学习依赖于多种互补的防御措施。
总体而言,先进连接、协作学习和安全感知编排的融合,正在将边缘从孤立端点的集合转变为协调的学习结构。随着网络演进以支持意图感知路由、拆分计算和隐私保护协作,智能越来越多地从交互中涌现,而非来自任何单一设备。展望未来,边缘系统的下一阶段将由连接本身如何有效变得自适应所定义——塑造分布式智能体之间学习发生的时间、地点和方式。在这种模型中,网络从被动的数据传输机制转变为分布式智能的主动参与者,使互联边缘系统之间能够实现集体感知、协调和决策。
第八章:超个性化与情境感知边缘AI过去几年间,边缘AI的用户体验已超越了被动的命令控制式界面,转变为具有预测性、自适应性和代理性的形态。这一转变由超个性化和情境AI驱动,这些系统不仅处理用户输入,还能推断用户意图及其所处情境。
2020年代初期那种静态的、基于规则的"智能设备"已被具有情境感知能力的"代理型"边缘设备所取代。这些设备维护着一个动态的、私密的用户偏好、习惯及即时环境模型,在无需将私密数据上传至云端的前提下,提供主动式协助,从而保障用户隐私。
上下文感知 AI 与传统个性化技术的区别在于实时、多维度的信号融合。简单的个性化算法可能仅根据历史记录推荐播放列表,而上下文感知 AI 引擎则主动摄取多种实时信号的融合数据,包括时间、精确地理位置、生物特征反馈、环境噪音水平以及最近的数字日历交互。
8.2. 设备上 RAG 与本地向量数据库实现这种记忆和检索能力的技术基础是将检索增强生成(RAG)迁移到边缘端。最近,LocalRAG 已成为移动和嵌入式应用中常见的架构模式。边缘设备不再查询云端托管的数据库,而是维护一个本地向量存储,使用轻量级解决方案,如 Chroma、基于 SQLite 的向量扩展或其他嵌入式相似度搜索库。这存储了用户个人数据的语义嵌入(笔记、消息、应用使用历史)。
8.3. 信任栈(Trust Stack):伦理与反操纵随着超个性化能力的实现,操纵风险也随之而来。一个能够推断用户情绪状态和行为模式的AI系统,如果被滥用,可能会被优化为以道德上存疑的方式最大化用户参与度或影响购买行为。作为回应,如今的边缘AI生态系统越来越多地采用"信任栈(Trust Stack)",将反操纵和公平性保障措施直接嵌入到设备级智能中。
8.4. 通过设备端学习(On-Device Learning)实现个性化超个性化的最后一个支柱是设备端学习。近年来,诸如低秩适应(LoRA)等技术已被适配用于边缘环境。设备无需重新训练完整的基础模型(foundation models),而是更新叠加在冻结基础模型之上的小型适配器矩阵。这些适配器捕捉用户特定的词汇、偏好和习惯,同时保持足够紧凑(通常仅几兆字节),以便机会性地更新并高效存储。
这种方法允许个性化随着用户行为的变化而逐步演进,无需将私人数据导出到云端。元学习(Meta-learning)技术进一步支持这一过程,通过训练基础模型从有限示例中有效适应,从而在严格的功耗和计算约束下实现少样本(few-shot)个性化。
8.5. 代理式未来情境感知、本地检索和以信任为中心的设计的融合,标志着边缘设备参与数字生活方式的转变。设备不再仅仅是被动工具,而是越来越多地作为代理,代表用户预测需求、筛选信息和协调交互。这一演进基于本地处理和隐私保护架构,阐明了边缘 AI 的长期发展方向:系统能够适应个人需求,同时将身份、记忆和代理权锚定在边缘端。
第九章:信任栈——安全、隐私、可解释性在边缘端处理数据可以改善延迟、成本和能源使用,但也可能增加暴露风险。一旦传感器或微控制器开始推断结果,每个决策都会带来运营和法律层面的影响。正因如此,边缘计算领域的研究人员和设计人员正致力于开发一套"信任栈"(Trust Stack)。信任栈是一种分层框架,将安全、隐私和可解释性置于优先地位,确保智能终端在其整个生命周期中始终保持可验证的安全性与可问责性。
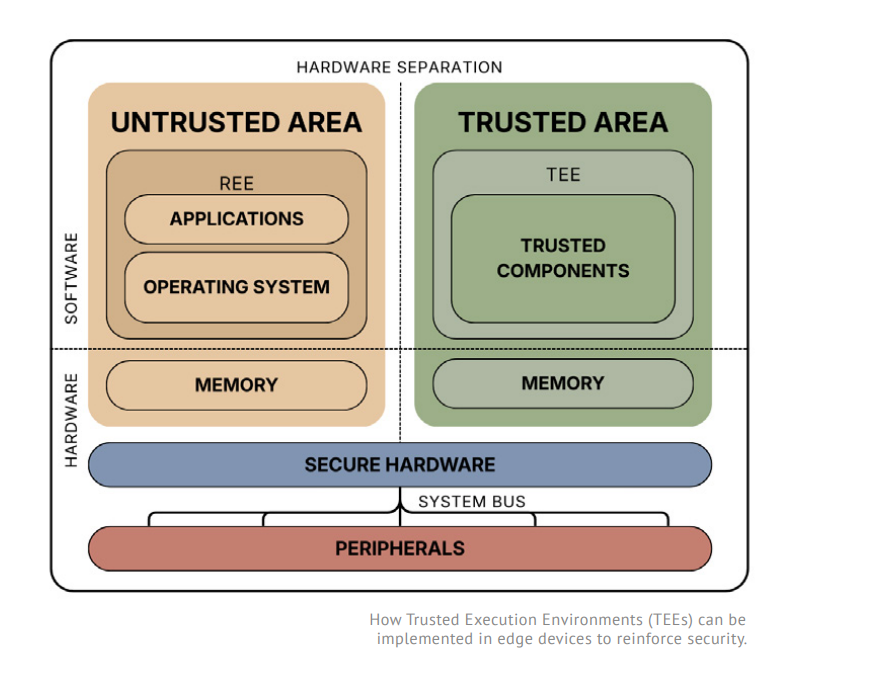
信任栈始于物理层,即可信执行环境(TEEs),例如 Arm TrustZone、Intel SGX、AMD PSP 和 RISC-V MultiZone。TEEs 将处理器划分为安全世界和非安全世界,即使恶意行为者攻陷了操作系统,也能保持加密密钥或推理代码的隔离 。最近的实现已将这些飞地扩展到了异构 CPU-GPU 系统。例如,SecureInfer 架构论文表明,张量和模型权重可以在飞地内存内执行期间始终保持加密状态,几乎消除了 AI 推理过程中的明文暴露 。
9.2. 机密计算与数据隐私一旦设计人员建立了硬件信任,下一层保护便是处理器所计算的内容。边缘 AI 部署正日益成为知识产权盗窃和数据泄露的目标,使得机密计算变得比以往任何时候都更加重要。
9.3. 透明度和问责制安全性和隐私性意味着系统行为正确。透明度意味着人类理解其原因。透明度对边缘AI系统来说是一项挑战,因为设备在严格的延迟限制和有限的计算能力下运行。
在边缘设备真正普及之前,行业需要建立透明度的基础。通过法律框架激励的设备的可解释性和模型文档化,可以帮助将AI从黑盒系统转变为更易于访问和理解的东西。
信任的最后一层涉及环境和社会影响。尽管边缘AI减少了对数据中心的依赖,但其总体能源足迹仍然不可忽视。2025年的一项研究测得,GPT-4o级模型的LLM推理每次查询的能源成本为0.43 Wh ,这促使开发者将能源和碳指标作为模型遥测的一部分进行追踪。
9.5. 迈向统一的信任架构日益成熟的信任栈表明,设计师必须从底层开始构建对AI的信心。从安全芯片到ESG报告,每一层都保护着可信度的不同维度。
第十章:Edge AI 的未来Edge AI 已成为现代系统中的一个结构层。在工业、汽车和嵌入式平台上,越来越多的决策在本地进行,同时受到功耗、延迟和可靠性的严格限制。其结果是明显转向边缘原生架构,这种架构更看重效率、自主性和控制能力,而非单纯的规模。
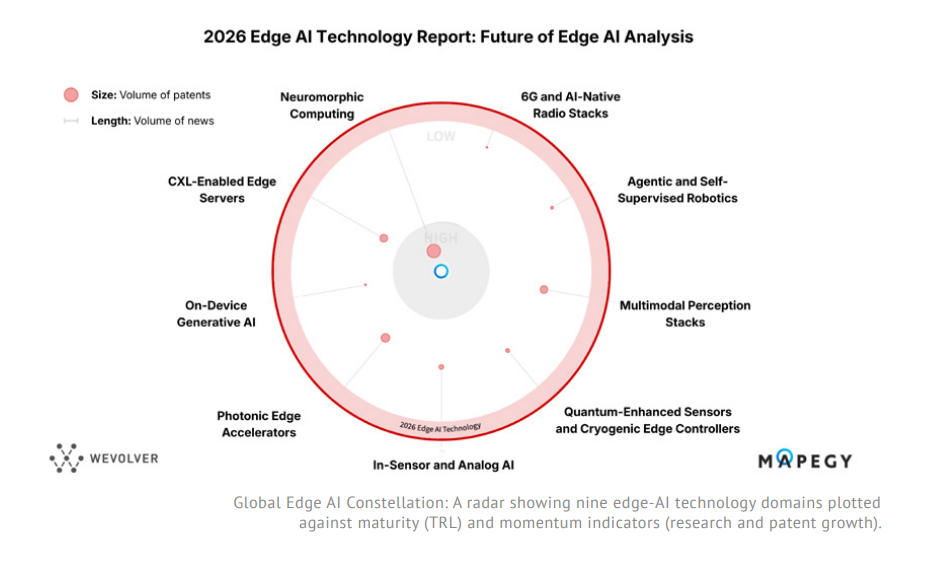
Wevolver 已与数据智能领域的领军企业 Mapegy 合作,对边缘相关领域的研究出版物、专利活动和新闻报道进行了纵向分析。这项分析为过去十年的发展提供了有价值的视角,并对未来几年进行了展望,以了解边缘 AI 范畴下多项技术的潜力。
综合来看,这些信号表明,边缘 AI 的下一阶段将较少由单一突破性组件定义,而更多由系统级整合来定义。正在获得发展势头的技术,是那些能够使智能在分布式物理环境中移动、适应和协调的技术。

Mapegy 的数据突出了九个正在塑造未来边缘格局的技术领域。这些领域在成熟度曲线上处于不同位置,从近期规模化应用到长期研究投入。了解每个领域的加速态势及其原因,有助于厘清边缘 AI 技术栈在未来五年内的演进方向。
5.6G 与 AI-Native Radio Stacks连接正日益成为智能栈的一部分,而非中立的传输层。AI-native 无线架构的研究反映了这一转变,将无线系统重新定义为自适应、可学习的组件,主动塑造边缘分布式智能的协调方式。
Mapegy 的指标将该领域明确置于早期定义阶段,技术成熟度涵盖从实验性测试平台到预标准原型。绝对活动水平仍然较低,但研究和讨论的增长率表明,基础架构决策正在部署时间表之前很早就开始形成。这种模式与那些在规模化之前必须在标准组织、硬件路线图和生态系统参与者之间达成一致的技术一致。
从技术角度来看,当前工作专注于将学习直接嵌入 PHY 层和 MAC 层功能中,包括波束成形、信道预测、干扰管理和联合通信感知。这些能力是分布式系统亚毫秒级协调的先决条件,使车辆、机器人和基础设施之间能够实现协作感知和共享态势感知。由爱立信、华为和诺基亚等公司主导的现场试验和研究项目展示了 AI-native 无线概念如何与早期 6G 标准化工作并行探索。
从战略角度来看,AI-native radio stacks 最好被理解为长期赋能者。其价值仅在与广泛的 6G 部署、新型调制解调器架构以及旨在利用超低延迟协调的边缘系统相结合时才会显现。V2X 感知、分布式推理和大规模协作感知等用例既取决于网络演进,也取决于本地计算的进步。这种耦合既解释了强大的长期市场潜力,也解释了缓慢的货币化路径。
有意义的拐点在 2020 年代末之前不太可能出现,更广泛的影响预计将在 2029-2032 年左右出现,届时标准将趋于稳定,早期部署将成熟。对于边缘系统设计者而言,当前的相关性在于架构前瞻性:构建能够适应新兴 AI-native 连接范式的系统,而非将无线视为固定约束。目前,这仍然是一个需要密切关注的领域,在选择性投资赋能技术的同时,随着 6G 试点向运营网络过渡而重新审视。
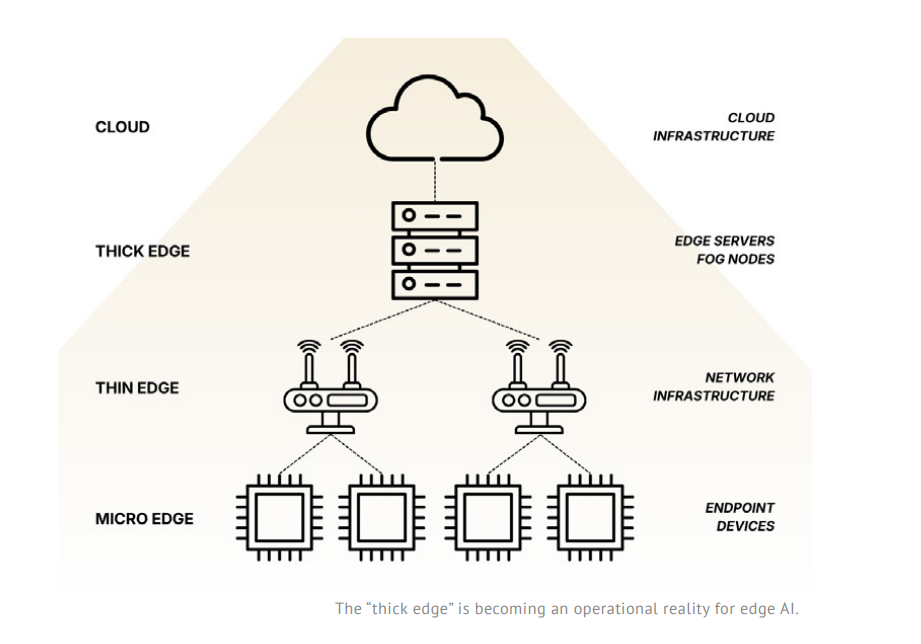
CXL-enabled edge servers 代表了边缘栈中从架构意图到运营现实最明显的转变之一。专利活动和部署级产品的急剧增长反映了一个生态系统,该生态系统已超越实验阶段进入规模化模式,这由解决异构边缘系统内存瓶颈的需求所驱动。
这些平台支撑着日益被称为"厚边缘"的架构:本地化基础设施,聚合附近设备的计算能力,同时保持独立于集中式云资源。通过实现跨 CPU、GPU 和加速器的相干内存池化,CXL 使边缘运营商能够动态扩展容量、支持多模型工作负载,并在无需重新架构系统的情况下适应硬件组成。在工业园区、电信节点和智能基础设施枢纽中,这实际上将边缘转变为延迟优化、自主的微云。
与许多面向未来的边缘技术不同,CXL 受益于高技术成熟度和短影响时间。基于 CXL 2.0 的产品已经在出货,CXL 3.0 将该模型扩展至机架级架构。来自英特尔、三星和研华等主要平台供应商的支持表明了广泛的行业协同,而用于内存池化和编排的软件层正开始稳定。
从战略角度来看,CXL-enabled edge servers 处于近期边缘 AI 规模化的核心。它们解决的是结构性约束而非增量优化,使其成为多加速器推理、共享 KV-cache 工作负载和自适应边缘数据中心的基础。互操作性和运营复杂性方面的风险仍然存在,但这些是执行挑战而非技术未知数。
展望未来,CXL 有望成为高端边缘基础设施的默认架构假设。在本地平线追踪的技术中,它脱颖而出,成为时机、成熟度和市场拉动已经一致的领域之一,这使得这是一个需要立即采取行动而非推迟的领域。
在边缘AI前沿领域,代理式和自监督机器人技术脱颖而出,成为最大的近期市场机遇,这得益于强劲的商业兴趣和与现实世界部署距离的不断缩短。这一转变的核心是从脚本化工具转向自主代理,这些代理能够在日常环境中通过自身的闭环策略进行感知、行动和适应。
2026年的标志性趋势是物理AI的兴起,机器人系统开始走出实验室进行展示,具有明确的产品意图、行业合作伙伴关系和部署路线图。例如,在CES 2026上,以NVIDIA为中心的展示突显了广泛的代理式机器人,这些机器人通过设备端感知、控制和决策循环运行,标志着研究、工具链和部署之间的日益协同。其中包括——仅举几例——Boston Dynamics的Atlas向工业推广转型,NEURA Robotics的人形机器人平台面向通用任务,以及LG面向消费者的系统展示具身操作和交互能力。这些系统强调自主性、感知和设备端决策循环,而非远程控制或依赖云端的智能。
在技术层面,进展由自监督学习、基于模拟的训练和受限的设备端策略适应所推动。这些方法减少了对标注数据集的依赖,同时使机器人能够适应新环境和任务。与此同时,有限自主性、安全层和可审计性仍然是核心设计要求,尤其是对于工业和消费者部署而言。
Mapegy数据反映了这一融合趋势。新闻活动同比增长超过900%,而研究产出增长了约200%,将代理式机器人技术置于0–5年的影响时间窗口内。这一势头反映了感知、控制、生成建模和边缘计算之间的实际整合,而非孤立的算法进步。
从战略角度来看,代理式机器人技术正成为系统级集成挑战和边缘AI价值创造的主要驱动力。近期用例包括自适应仓库自动化、检查和维护机器人以及消费者服务机器人,随着平台成熟和安全框架稳定,预计到2030年将实现更广泛的扩展。
光子边缘加速器解决了先进边缘工作负载中的一个基本扩展限制:计算吞吐量与数据移动之间日益加剧的不匹配。通过使用光而非电子执行矩阵运算,光子架构为那些使数字加速器承压的工作负载类别提供了极高的带宽和能源效率。
Mapegy的指标显示,该领域拥有大量累积研究、专利活动以及近9亿美元的初创资金,表明长期信心强劲。新闻和专利增长保持稳健,反映了在光学MAC阵列、光子张量核心和电光计算管道方面的活跃实验。同时,技术成熟度仍处于中等水平,将光子加速器明确置于中长期采用窗口内。
行业参与涵盖现有企业和深度科技初创公司。Sony Group Corporation、Intel、IBM和Taiwan Semiconductor Manufacturing Company等成熟企业在硅光子学研究和集成方面活跃,而Celestial AI(现为Marvell一部分)、Black Semiconductor和OptiCore等初创公司则专注于光学互连、光子计算架构和混合架构。这种组合反映了一个仍在探索形态因素和系统边界而非趋向主导设计的领域。
正在积极探索的用例包括高吞吐量推理、电信和信号处理以及带宽密集型工业分析,在这些领域光数据路径提供了明确的理论优势。然而,实际限制仍然具有决定性。制造可扩展性、光子 - 电子集成、封装、热稳定性以及成熟软件工具链的缺乏继续限制部署超出试点和专用环境。
从战略角度来看,光子边缘加速器代表了边缘计算格局中一个高潜力但长周期的方向。近期影响可能仍然局限于小众市场,混合电光系统和光子互连将先于完全光子计算核心出现。有意义的转折点更可能在2030年之后出现,这取决于硅、光子学和软件跨领域集成、工具链和协同设计的进展。
9. Quantum-Enhanced Sensors 和 Cryogenic Edge ControllersQuantum-enhanced sensing 处于成熟度曲线的最边缘。这些系统利用量子效应,如 NV centers、cold atoms 和 superconducting circuits,实现超越经典极限的灵敏度水平,通常需要具备 cryogenic control electronics 来维持稳定性和超低噪声。
Mapegy 的指标显示出选择性但有意义的势头。新闻活动激增,主要由 defense、aerospace 和 scientific instrumentation 项目推动,而研究产出则趋于整合而非扩张。这反映了该领域正从广泛的学术探索转向专注的、任务关键型应用。
短期内,这些技术不会影响主流 edge AI 部署。它们的相关性在于那些精度、完整性和弹性超过成本和可扩展性的领域,包括无 GPS 导航、advanced medical imaging、geophysics 和 secure sensing。
对于 2026–2035 年这一时期,quantum-enhanced sensors 应被视为具有长商业化周期和狭窄但高价值市场的战略基础设施技术,而非通用 edge platforms。
随着边缘AI系统变得更加自主和广泛部署,治理工作正向上游转移,深入到设计、部署和生命周期管理环节。在欧盟,AI Act引入了分阶段的监管框架,针对通用和高风险系统的义务将在2025–2027年期间逐步生效。对于受监管行业的边缘部署,这意味着需要满足围绕文档、日志记录、鲁棒性验证和上市后监控的具体要求。
与此同时,全球框架正在风险管理及系统鲁棒性方面趋于一致。NIST AI风险管理框架及其新兴的网络安全配置文件,为保护AI系统在其完整生命周期内的安全提供指导,涵盖模型供应链、更新机制和运营控制等方面。ISO/IEC 24029-2等标准形式化了在环境变化和边界案例条件下评估神经网络鲁棒性的方法,这对边缘感知和自主系统尤为相关。
连接标准机构也在开展基础性工作。在3GPP内部,近期发布的版本强调了对AI辅助和AI原生无线架构的技术研究,预示着通信、感知和推理将如何共同演进,面向未来的6G系统。
最后,环境和治理压力正在引入对能源透明度的新期望。在推理层面测量和报告能耗正成为一个关注点,这不仅关乎优化,也涉及合规、可持续性报告和长期系统设计。

Edge AI 正成为 2020 年代后期定义性的平台转变。智能正日益靠近数据生成和决策制定的地方,消融了感知、计算和控制之间的传统界限。
Mapegy 的数据揭示了一致的趋势。研究势头正集中在能够实现本地生成、感知和适应的技术上。在支持边缘分布式、紧密集成计算的基础设施投资正在加速。与此同时,长期研究继续探索新的效率前沿,这些前沿可能在十年后重塑边缘系统。
最能适应这一未来的组织不会孤立地进行优化。它们会将模型、silicon、connectivity 和 governance 视为一个整体系统,并据此进行设计。Edge AI 的下一轮突破不会以单一平台的形式出现。它们将通过在边缘构建的分布式、超高效和自主系统而涌现。
结论Edge AI 已进入决定性阶段。
最初只是将推理能力推向更靠近数据源的尝试,如今已演变为对智能如何在去中心化基础设施之外进行设计、部署、治理和可持续运营的更广泛重构。在硬件、软件、连接性和系统架构等各个层面,一个一致的信号表明:边缘的进步不再由孤立的突破驱动,而是由全栈的协同推进所推动。
本报告所考察的技术指向一条清晰的轨迹。小型化和专业化模型正成为智能的主导单元。内存、计算和传感正融合为紧密集成的系统。仿真、合成数据和协同设计工作流正在重塑边缘系统在部署之前的构建方式。从光子学到量子传感的长期研究持续拓展效率边界,而近期部署则聚焦于可靠性、自主性和能源管控。
对于计划在 2026 年启动项目的组织而言,挑战已从可行性转向执行:如何负责任、高效且规模化地实现 Edge AI 的运营化。在此背景下,五项行动要务应运而生:
1.为系统级效率而非峰值性能而设计:将模型、硅片、内存和功耗作为统一系统进行优化。收益越来越多地来自集成和编排,而非原始算力。
2.优先部署可落地的智能而非通用性:青睐可本地适配的任务特定型和情境感知型模型。在真实世界边缘条件下,小型、范围明确的模型表现优于通用方法。
3.将仿真和验证纳入开发流程:尽早使用数字孪生、合成数据和鲁棒性测试。边缘故障在部署后调试成本高昂,且在受监管环境中日益不可接受。
4.从第一天起规划生命周期治理:日志记录、更新机制、鲁棒性指标和能源报告正成为基线期望。治理现已成为产品架构的一部分,而非事后补充。
5。使路线图与生态系统成熟度而非炒作周期保持一致:区分可近期部署的技术与需要长期投资的技术。战略耐心与技术雄心同等重要。
我们的创新呼吁如下:
Edge AI 的下一章将由那些愿意在约束真实、权衡不可避免之处进行构建的人所塑造。企业、平台提供者和开发者有机会通过推进高效、可信且为其所处环境而设计的系统来定义这个时代。Edge AI 的领导力将不仅由规模衡量,更由将智能转化为边缘可靠行动的能力来衡量。基础现已清晰可见。责任与机遇在于如何将它们组装起来。