本文章由觐嘉科学仪器(上海)有限公司提供
机械臂,智能制造皇冠上的明珠,正以前所未有的速度走入工厂、医院、仓库乃至深海与太空。然而一个残酷的现实横亘在所有研发者面前——实验室里运指如飞的机械臂,一旦踏入真实产线,往往故障频出、精度漂移、安全隐患丛生。
问题出在哪里?出在检测环节的割裂与缺失。
传统检测各管一段:测功能的不管性能,测性能的不顾环境,测安全的忽略长期可靠性。这种碎片化验证,根本无法回答一个根本问题——这台机械臂,究竟能不能用、好不好用、耐不耐用、安不安全?
全参数软硬件一体化检测系统,正是为破解这一困局而生。它不是某个单一工具的升级,而是一套从底层逻辑到顶层架构的完整验证哲学。
系统架构:三层智能体撑起"可信赖"的天空
一体化检测系统的核心框架,可以凝练为三大层级——操作层、监控层、软件功能模块层。这三者并非平行关系,而是层层递进的金字塔结构。
操作层:人机交互的窗口
操作层主要提供上位机的人机图形界面显示与键鼠命令交互。在人机交互操作基础上,结合设备接口应用程序编程接口技术,实现执行设备的触发与控制。操作人员通过可视化控制台,实时监控检测过程、决策日志与缺陷标注,实现从需求输入到自动执行再到结果分析的全流程闭环。
监控层:永不眨眼的哨兵
监控层由软件内部轮询线程架设,建立设备监控与数据查询子系统,实现交互指令校验、实时数据查询、历史记录保存及异常事件告警。它像一位不知疲倦的哨兵,全天候守护系统运行状态,任何风吹草动都逃不过它的眼睛。
软件功能模块层:五把利刃直指痛点
复杂检测过程控制组态软件包含五大核心功能模块:
设备通讯及选取功能模块——面向系统执行设备的资源共享与协同工作,在上位机客户端与多个服务端间有效构建全双工通路基础上,通过整合多执行设备交流信道,发送触发及初始化指令,实现上位机与图像采集板卡、多自由度串联工业机械臂控制柜及激光发生器电控柜的通讯互联。
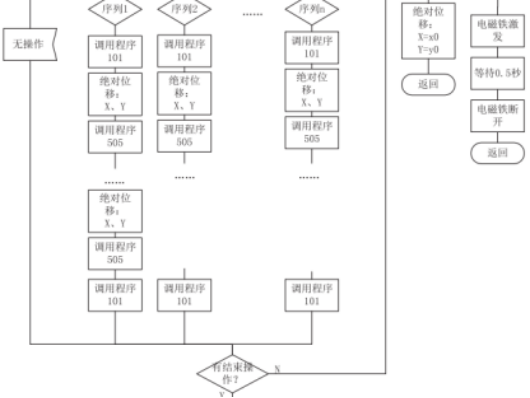
轨迹抓取及转译功能模块——将检测任务转化为机械臂可执行的运动指令,完成从任务描述到动作规划的翻译。
机械臂控制及监测功能模块——实时驱动机械臂运动,同步采集关节状态、电机参数、编码器反馈,构建完整的运动数据链。
机器视觉功能模块——通过工业相机与深度学习算法,实现目标识别、定位抓取、缺陷检测等视觉任务,让机械臂拥有"眼睛"。
交互信息反馈显示功能模块——将检测结果以直观方式呈现,支持实时曲线、历史趋势、异常告警等多维展示。
核心技术武器库
数字图像相关技术
非接触式测量技术,通过对比物体受力变形前后的数字图像,精确捕捉位移与应变。在机械臂表面制作散斑,部署多台摄像机全场覆盖,单次采集即可获取海量三维坐标点,生成位移与应变场云图。无论是静态加载下的全场变形分析,还是动态载荷下的刚度评估,都能给出直观而精确的答案。
动作捕捉系统
精度标定的标配。光学动作捕捉通过在机械臂关键节点布置标志点,实现亚毫米级的实时位置追踪,数据延迟极低,兼容主流开发环境。无论是国产方案还是国际品牌,都已成为机器人标定与运动学验证的核心工具。
三维视觉测量
让机械臂拥有"眼睛"。结构光相机获取深度信息,配合自研全局标定技术克服机器人绝对定位误差,测量精度可与三坐标对标。多机械臂协同加数字孪生虚实映射,更能应对超大工件的检测需求。
智能视觉分拣
结合深度学习目标检测技术与机械臂控制,实现从识别到抓取的全链路自动化。视觉识别、坐标转换、机械臂控制三个模块需像齿轮一样严丝合缝地配合。计算单元要够强、机械臂精度要匹配、相机帧率不能低——这是三条黄金法则。
智能体驱动的自主测试
将大模型智能体框架与高精度机械臂整合,打造软硬一体、自主决策的测试系统。自然语言驱动测试执行,多模态感知决策,持续自适应——当被测对象更新时,通过少量样本学习自动调整操作策略,告别脚本重构。