文章由山东赛锐特检测仪器有限公司提供技术指导
一、仪器介绍
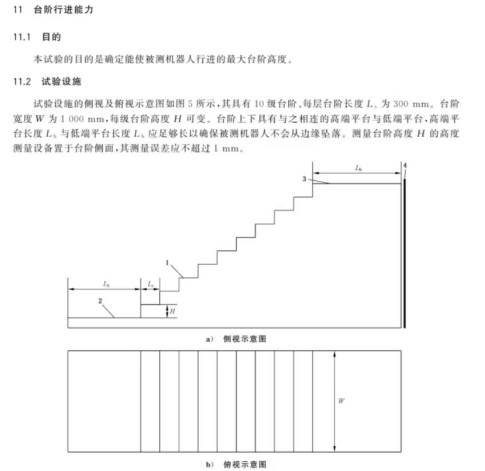
完全匹配标准11.2 试验场地结构尺寸、台面摩擦、高度测量精度、11.3 两套完整试验方案(上行极限高度试验、固定高度重复性通行试验),适用于双足人形、四足巡检、多足救援腿式机器人台阶通行性能型式检验。

二、满足标准
GB/T44251-2024《腿式机器人性能及试验方法》第 11 章台阶行进能力。
三、技术参数
参数项
规格
控制系统
PLC+Windows系统
操作界面
彩色10寸嵌入式工业电脑
台阶级数
标准10级
每层台阶长度Ls
300mm
台阶宽度W
1000mm
台阶高度调节范围H
0~300mm
低端起步平台长度Lb
≥1200mm,满足机器人稳定起步站立空间
高端终止平台长度Lt
≥1200mm,保障机器人登顶后完整站稳姿态判定
平台与台阶衔接
无缝拼接,台面平面度≤0.8mm/m,无高低台阶落差
升降同步控制
整机所有台阶同步等高升降,无高低差、无倾斜偏差
计时精度
误差≤20ms
计时逻辑
机器人完全驶离低端平台启动计时,整机全部稳定站立于高端平台停止计时
电源
AC220V±10%50Hz
四、核心用途
产品研发:用于新品研发、结构优化、算法迭代与样机性能对标,解决传统试验无标准场地、数据主观性强、无法量化对比的问题,助力产品快速迭代升级。出厂质检场景:实现机器人台阶通行性能全流程质量管控,保障量产产品性能一致性、稳定性,杜绝批量质量缺陷。合规性检测场景:满足第三方检测机构、行业认证的标准化测试需求,测试数据可直接作为机器人产品合规性判定的依据。
五、基本配置
主机1台
扳手1套
电源线1根
说明书1份
合格证1份
保修卡1份
铭牌1份
