工程师必备:从状态切换、参数配置到实时数据传输,一篇搞定CANopen通信难题!!!
CANopen协议在工业自动化中无处不在,但复杂的对象字典、多样的报文类型常让开发者头疼。本文将NMT网络管理、SDO服务数据、PDO过程数据、心跳机制及COB-ID速查表一网打尽,助你快速掌握CANopen精髓。
一、NMT(网络管理)NMT负责设备的状态切换、上线管理与心跳监控。
1.1 从机状态切换指令NMT主站通过特定指令控制从机的运行状态,指令格式:功能码 + 节点ID
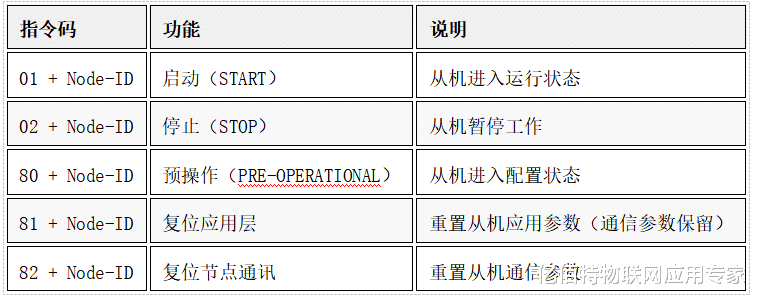
节点上线:从机启动后,主动发送 700h + Node-ID 报文(数据段为1字节00),告知主站“已就绪”。
心跳报文:从机周期性发送 700h + Node-ID 报文,数据段1字节标识当前状态:
04:停止状态
05:运行状态
7F:预操作状态
主站通过 73F 报文(无节点ID)广播自身在线状态。
二、SDO(服务数据对象)SDO用于非实时的参数读写(如对象字典配置),采用 “请求-响应” 模式,报文格式固定。
2.1 SDO报文ID规则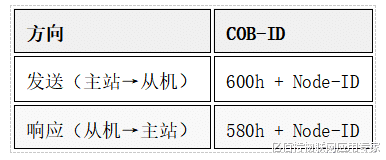
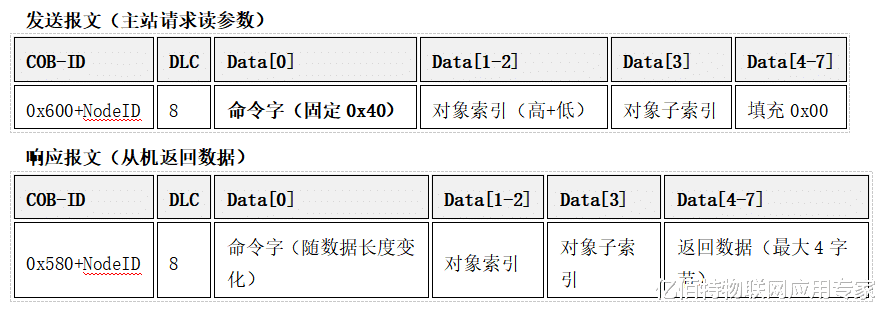
响应命令字规则:
1字节数据:0x4F
2字节数据:0x4B
3字节数据:0x47
4字节数据:0x43
读取失败:0x80
2.3 SDO写报文格式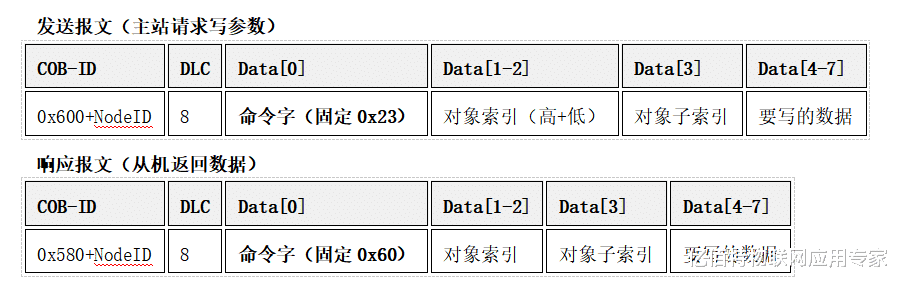
PDO是CANopen的实时数据传输载体,分为发送PDO(TPDO,从机→主站)和接收PDO(RPDO,主站→从机),最多支持4组PDO通道。
3.1 PDO报文ID规则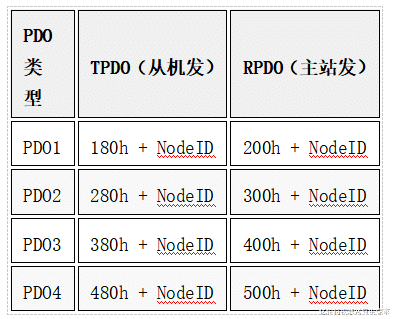
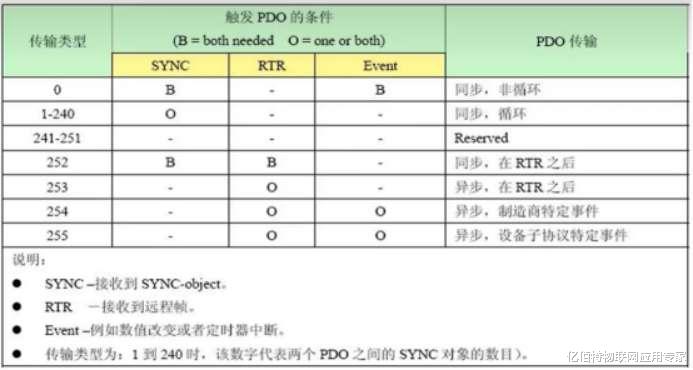
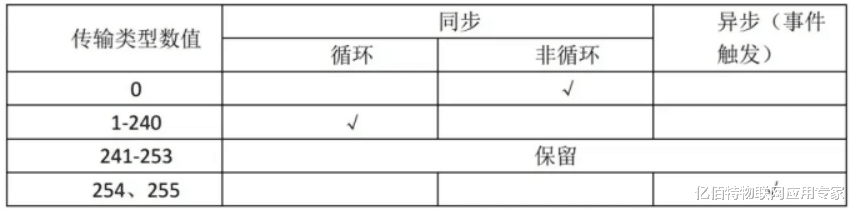
PDO的传输时机由传输类型决定,核心触发条件包括同步(SYNC)、远程帧(RTR)、事件(如数据变化):
PDO的传输类型位于通信参数(RPDO:1400h~1403h,TPDO:1800h~1803h)的子索引02上。
传输触发类型如下:
(1) TPDO传输类型为0:映射数据改变且接收到一个同步帧时,发送该TPDO。
(2) TPDO传输类型为1~240:接收到相应个数的同步帧时,发送该TPDO。
(3) TPDO传输类型为254或255:映射数据改变或事件计时器到达时发送该TPDO。
(4) RPDO传输类型为0~240:接收到一个同步帧时,将该RPDO最新数据更新到应用。
(5) RPDO传输类型为254或255:将接收到的数据直接更新到应用。
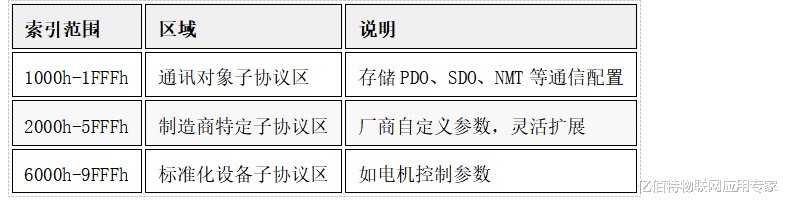
四、对象字典(OD)对象字典是所有可配置参数的仓库,通过 16位索引 + 8位子索引 标识,分为4大区域:
设备上线:从机发700+NodeID(00),主站确认;
状态配置:主站发NMT指令(如80+NodeID),从机进入预操作状态;
参数配置:主站通过SDO(600+NodeID)读写从机对象字典,配置PDO映射、传输周期等;
启动运行:主站发01+NodeID,从机进入运行状态;
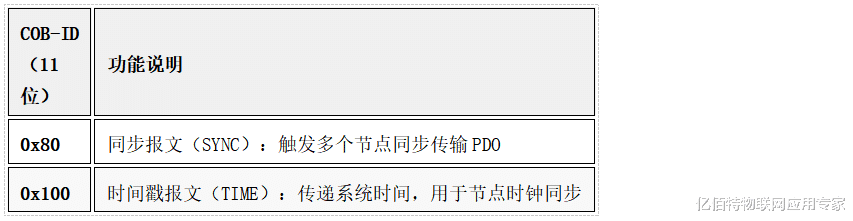
实时通信:主站发SYNC(080)触发PDO,从机通过TPDO传数据,主站通过RPDO发控制指令;
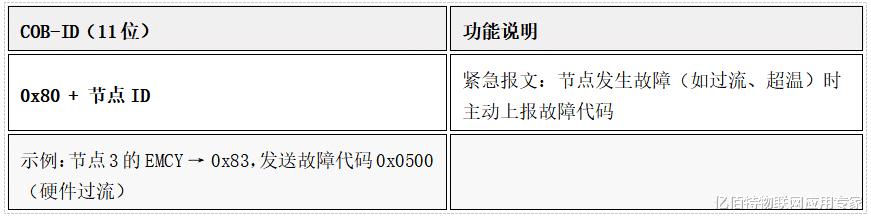
故障监控:从机故障时发紧急报文(080+NodeID),主站通过心跳报文监控设备状态。
六、不同COB-ID的功能速查6.1 网络管理类(NMT)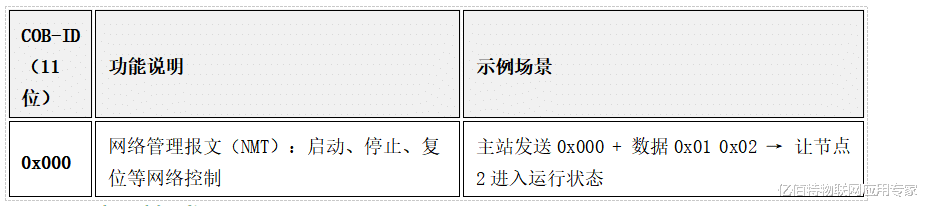

示例:主站读节点2 → 主站发0x602,从站回0x582
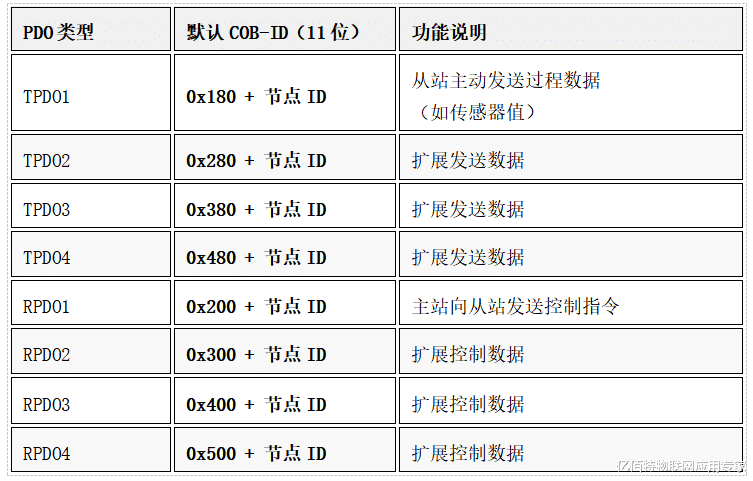
6.5 过程数据对象(PDO)每个节点最多支持4个TPDO和4个RPDO,默认COB-ID如下:
CANopen标准中,从站的心跳报文 COB-ID固定为 0x700 + 节点ID(11位标准帧)。
例:节点ID=2的从站,心跳报文COB-ID为 0x700 + 0x02 = 0x702。
✅ 总结CANopen协议通过清晰的报文分类(NMT、SDO、PDO、EMCY等)和灵活的对象字典机制,成为工业通信的事实标准。掌握NMT状态机、SDO配置流程、PDO触发模式以及各类COB-ID的用途,就能轻松应对大多数CANopen设备开发与调试任务。
🔍 小贴士: 调试时可借助CAN分析仪抓包,对照本文速查表快速定位问题。
注: 文中图片为示意图,实际使用时请参考具体设备手册。