英文题目:Origami and Zig-Zag Actuators for Adaptive Morphology in Soft Robotic Applications
中文题目: 面向软体机器人自适应形态的折纸与锯齿驱动器
作者:Yang Yang, Kejin Zhu, Shaoyang Yan, Yuan Xie, Boyu Zhang, Yunquan Li
作者单位: 南京信息工程大学自动化学院、中国海洋大学工程学院、上海交通大学生物医学工程学院、华南理工大学吴贤铭智能工程学院
期刊:IEEE/ASME Transactions on Mechatronics(IF 6.4中科院一区,JCR Q1)
发表时间:2025年9月19日
链接:https://ieeexplore.ieee.org/document/11173825
引文格式:Yang Y, Zhu K, Yan S, et al. Origami and zig-zag actuators for adaptive morphology in soft robotic applications[J]. IEEE/ASME Transactions on Mechatronics, 2025.
01 全文速览
软体机器人因其顺应性和安全性被广泛研究,但大多数软体驱动器功能单一——要么只能弯曲,要么只能伸缩,要么只能扭转。面对复杂多变的环境,单一运动模式很难胜任。
南京信息工程大学杨洋教授团队提出了一种正负压混合驱动的复合驱动器——POZA(Pneumatic Origami and Zig‑Zag Actuator)。它由一个折纸驱动器(正压驱动,实现展开和弯曲)和一个锯齿驱动器(负压驱动,实现折叠和收缩)组成。图1a 展示了POZA在软体机器人自适应形态中的应用概念;图1b 展示了多模块POZA在不同正负压组合下可以变换出的多种形状。
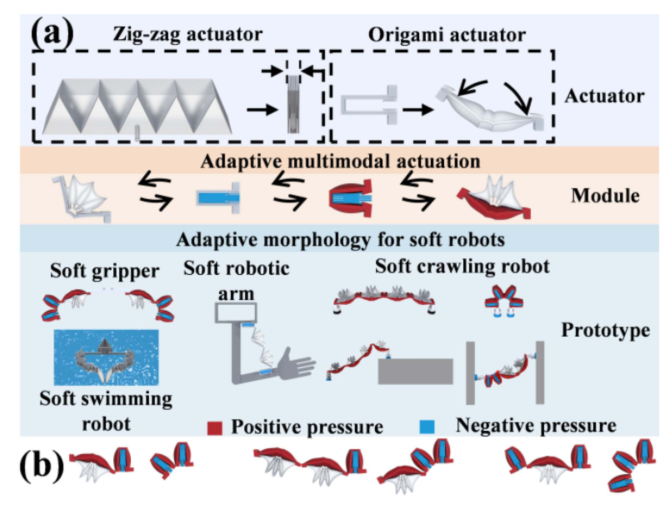
图 1 POZA驱动器及其多模块变形
一个POZA模块就能实现展开、弯曲、折叠三种基本动作。通过不同的驱动时序和压力组合,还可以产生更丰富的姿态变化。作者基于POZA搭建了四款机器人原型:软体机械臂(可旋转63°~80°,负载500g)、软体夹爪(抓取范围1cm~32cm,抓取力2.2N)、爬行机器人(可爬行、翻滚、钻缝、爬楼梯、攀爬垂直管道)、游泳机器人(可变宽度、前进/后退/转弯,最高速度7.32 cm/s)。图1b 中的多模块变形展示了POZA在单一模块和多模块下的形态调控能力。
核心亮点:
✅一个驱动器,三种基础动作:展开、弯曲、折叠,通过正负压时序组合实现
✅模块化设计:每个单元可独立控制,支持多模块串联构建复杂机器人
✅建模完整:建立了运动学模型和输出力矩模型,并通过实验验证
✅四款应用原型:覆盖操作(臂/爪)和 locomotion(爬行/游泳),展示多功能性
✅重复性好:500次循环测试,角度标准差小于0.32°,相对标准差低于2.2%
02 研究内容
🧩2.1 POZA的设计与制造
图2 展示了POZA的结构和基本变形原理。一个POZA模块由两部分组成:
折纸驱动器(橙黄色部分):TPU 3D打印,内部有连续流体通道,正压驱动时沿折痕展开
锯齿驱动器(灰色部分):3D打印PLA骨架 + TPU涂层尼龙布密封,负压驱动时收缩折叠
图2b 展示了三种基础变形:展开、弯曲、折叠。图2c 和 2d 分别解释了锯齿驱动器和折纸驱动器的工作原理。

图2 POZA的设计与三种基本变形
📐2.2运动学与力矩建模
作者将POZA简化为一个连杆系统,建立了端点坐标的运动学模型。图3a 展示了坐标系和几何参数。

输出力矩模型基于能量守恒:
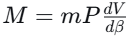

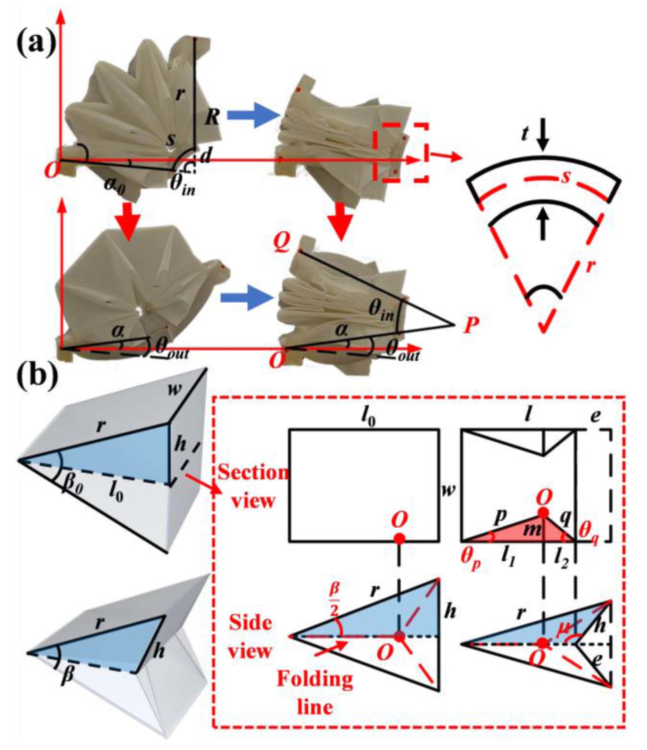
图3 POZA运动学建模
图4a 对比了理论轨迹与实验轨迹,两者基本吻合。图4b 显示负载越大,理论偏差越大(因为重心偏移)。图4d 展示了不同负压下力矩随角度的变化,最大误差6.7%。
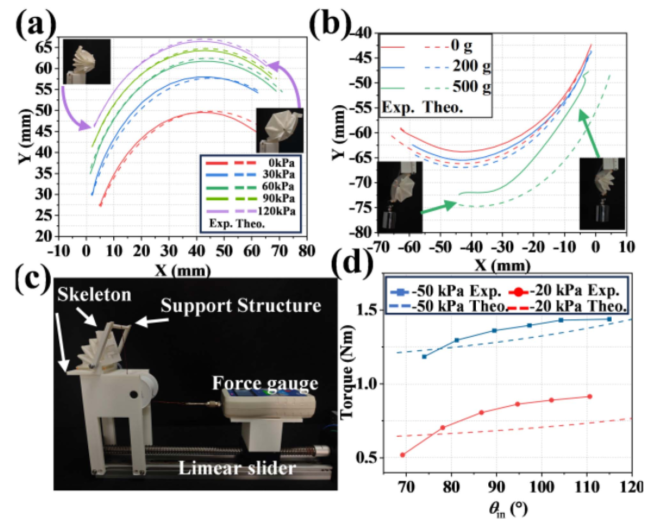
图4 理论与实验对比
🧪2.3实验表征
图5展示了POZA的性能测试。图5a 是实验装置。图5b 展示了单模块末端在不同驱动时序下的轨迹(蓝、红、紫、青四条曲线)。图5c 和 5d 展示了连续切换正负压时的角度变化,最大运动角63.8°,最小8.7°。图5e 比较了不同驱动序列的效果,先折后展比先展后折更有效。图5f-i 展示了不同压力组合下的姿态。图5j-l 是500次重复性测试,标准差极小。
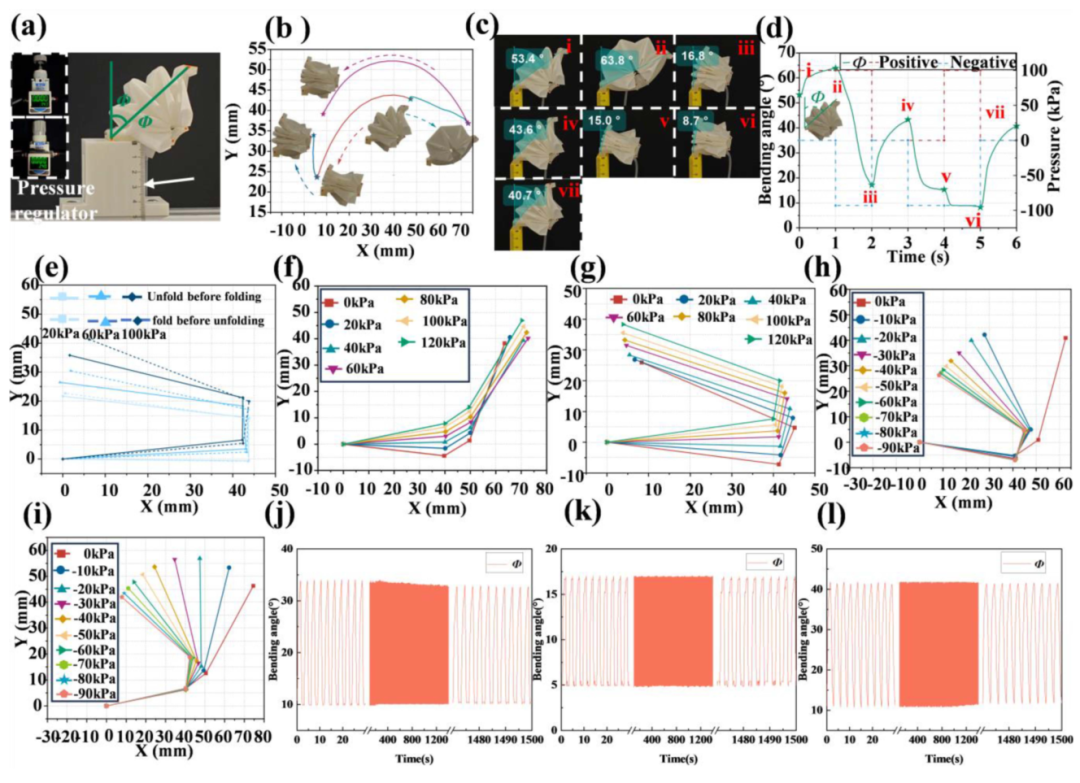
图 5 POZA性能表征
🤖2.4软体机械臂
基于四模块POZA设计了软体机械臂(图6a)。大臂和小臂通过滚轮连接,四个POZA模块驱动前臂运动。图6b 展示了无负载时的运动范围:顺时针63°,逆时针80°。当锯齿驱动器完全折叠时,大小臂夹角52°;完全展开时可达195°(轻微反向弯曲)。图6c 展示了负载500g时提升22cm。
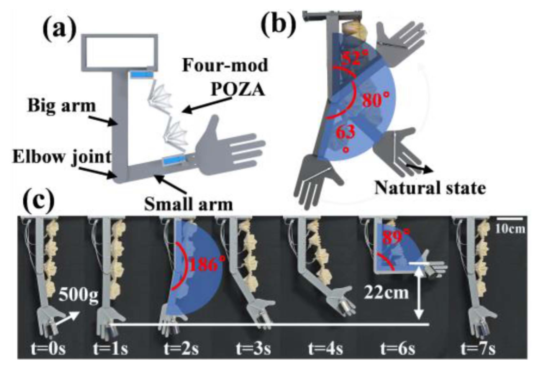
图6 四模块软体机械臂
✋2.5软体夹爪
图7a 展示了双三模块POZA组成的夹爪。初始开口41cm,正压驱动后最大54cm。图7c 展示了抓取各种物体:最小直径1cm的笔,最大32cm长510g的盒子。图7d 展示了通过单独驱动顶部锯齿单元,使夹爪伸入窄口抓取。图7f 展示了500次循环抓取力测试,平均2.2N。

图 7 软体夹爪及其抓取能力
🐛2.6软体爬行机器人
图8a 展示了四模块POZA + 两个吸盘组成的爬行机器人。图8b 展示了两种运动模式:蠕动(吸盘交替吸附,POZA伸缩前进)和翻滚(利用弹性势能翻转)。图8c 展示了通过时序控制实现“抬升”以跨越障碍。图8d 和 8e 展示了越障和爬楼梯(台阶高11cm)。图8f 展示了低高度钻缝。图8g-8h 展示了攀爬垂直管道(直径20~27cm,高度1.5m),通过动态调压(85→95→105 kPa)维持步长7.5cm。

图8 爬行机器人及其运动能力
🏊2.7软体游泳机器人
图9a 展示了两个三模块POZA反向安装作为“腿”,末端安装单向蹼足。图9c 展示了前进步态。图9d-f 展示了后退、左转、右转。图9g 比较了四种步态:Gait4速度最快(7.32 cm/s),Gait3单周期距离最长(21.9cm)。图9l 展示了通过不同步态组合改变宽度以通过狭窄障碍。
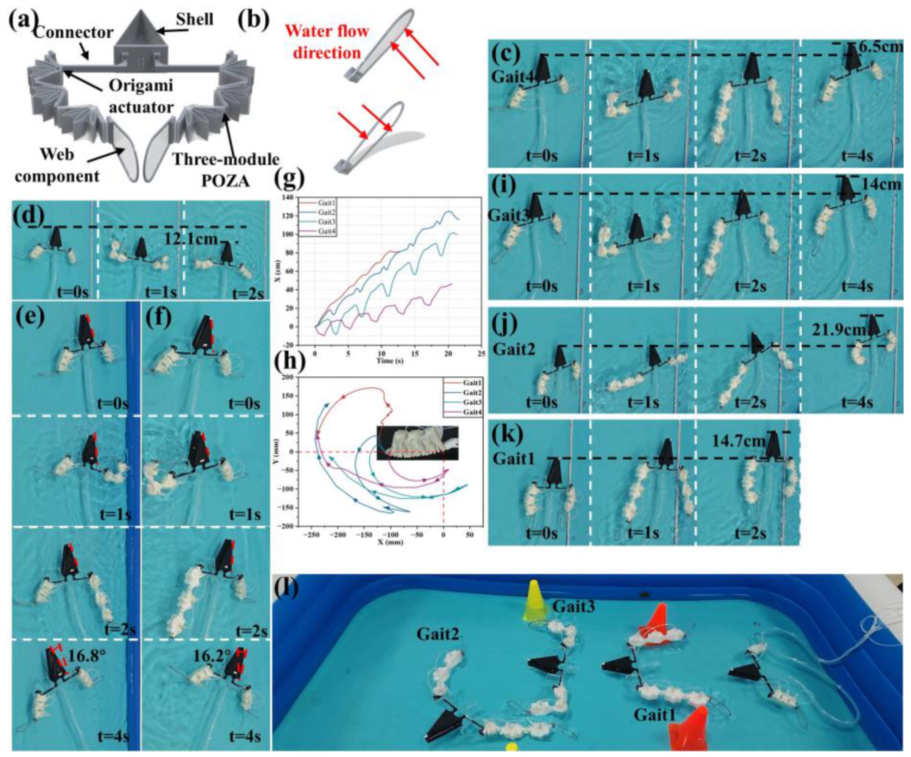
图9 游泳机器人及其步态
03 创新点
①正负压复合驱动,一个模块三种动作
现有折纸驱动器大多只利用正压展开,本文同时引入正压(驱动折纸)和负压(驱动锯齿),通过时序控制实现展开、弯曲、折叠三种独立运动。同一模块在不同时序下可以呈现完全不同的姿态,这在软体驱动器中很少见。
②完整的运动学与力矩模型
作者不仅做了实验,还建立了几何运动学模型(4)和基于能量法的力矩模型(17)。理论预测与实验结果基本一致,为后续优化设计提供了工具。
③从“单功能”到“多功能”的跨越
大多数软体驱动器论文只展示一种应用(比如要么夹爪,要么爬行)。本文一口气做了臂、爪、爬行、游泳四款机器人,且每个应用都利用了POZA不同的特性(臂用串联多模块、爪用对置模块、爬行用吸盘+时序、游泳用蹼足+步态)。工作量扎实。
④优异的重复性和鲁棒性
500次循环测试,角度标准差<0.32°,相对标准差<2.2%。在爬行机器人中,即使管道直径变化、高度增加,通过动态调压仍能维持稳定步长,说明驱动器的输出可重复且可控。
⑤环境适应性设计
爬行机器人可以爬楼梯(11cm高)、钻缝(低高度)、攀爬不同材料的垂直管道;游泳机器人可以通过改变步态调整宽度以通过障碍。这些演示直接回应了“自适应形态”的主题。
04 总结与展望
这篇论文给人的直观感受是:一个驱动器,多种玩法。作者没有追求极致的单点性能,而是把重点放在了“如何让同一个软体驱动器适应不同任务”上。通过折纸(提供展开和弯曲)和锯齿(提供折叠和收缩)的组合,加上正负压时序的灵活调节,POZA成了一个相当通用的“变形单元”。四款应用原型虽然各自不是世界纪录,但覆盖了操作和移动两大方向,展示了很强的工程通用性。
当然,目前的工作还有提升空间:建模时忽略了负载对重心偏移的影响,导致大负载下理论偏差增大;所有驱动依赖外部气源和手动控制,尚未集成自主感知和反馈。
未来研究将聚焦于以下几个方向:
🔸自感知集成:将柔性传感器嵌入POZA内部,实时监测变形状态,实现闭环反馈控制
🔸视觉引导自主调节:在机器人上加装摄像头,使机器人能够根据环境自动调整形态(如识别障碍物宽度后自动改变爬行步态)
🔸更高负载能力:优化折纸和锯齿的几何参数,在保持柔性的同时提升输出力
🔸无线化/无缆化:集成微型气泵和电池,实现完全自主的软体机器人系统
🔸多模块协同控制:探索更多模块串联/并联时的协调控制策略,用于更复杂的仿生机器人(如蛇形、章鱼臂)
在软体机器人设计中,您遇到过“一个驱动器只能做一种运动”的困扰吗?欢迎在评论区分享您的看法。
声明:本文仅供学术交流,版权归原作者所有。如有错误或侵权,请联系更正或删除,欢迎留言探讨。