DC娱乐网
机器人与控制前沿的文章
Science China Information Sciences | 大语言模型也能指挥无人机编...
2026-05-11 12:20
机器人与控制前沿
Science China Information Sciences | 大语言模型也能指挥无人机编队?LLM辅助多机器人路径规划框架
IEEE Transactions on Automation Science and Engine...
2026-05-10 11:55
机器人与控制前沿
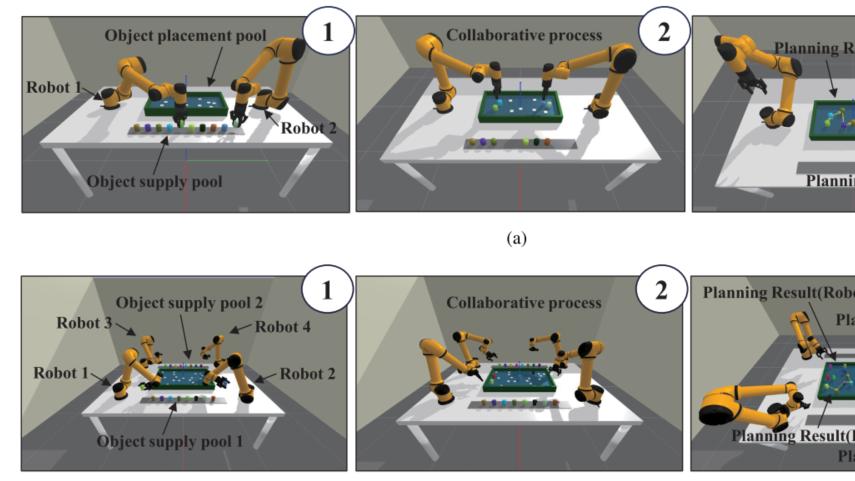
IEEE Transactions on Automation Science and Engineering|工业多机器人装配,任务规划与运动规划联合优化
Science China Technological Sciences | 从双臂协同到腰臂联动:...
2026-05-08 13:00
机器人与控制前沿
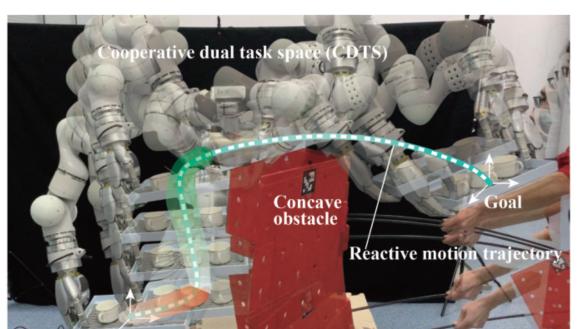
Science China Technological Sciences | 从双臂协同到腰臂联动:面向仿人上半身机器人的安全反应式运动规划
Robotics and Computer-Integrated Manufacturing | A...
2026-05-08 12:25
机器人与控制前沿
Robotics and Computer-Integrated Manufacturing | AR把人的空间判断交给LLM,工业机器人这样做运动规划
IEEE Transactions on Industrial Electronics|动态环境中机...
2026-05-07 12:30
机器人与控制前沿
IEEE Transactions on Industrial Electronics|动态环境中机器人如何少重规划,用碰撞预测决定局部重规划
IEEE Transactions on Robotics | 机器人不用“反复规划”了,物理信息神...
2026-05-06 12:35
机器人与控制前沿
IEEE Transactions on Robotics | 机器人不用“反复规划”了,物理信息神经时间场,让地图直接长出路径
IEEE/ASME Transactions on Mechatronics | 从人类躯干经验到机...
2026-05-05 12:05
机器人与控制前沿
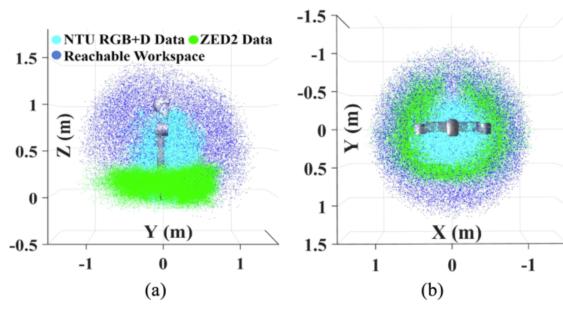
IEEE/ASME Transactions on Mechatronics | 从人类躯干经验到机器人运动规划:TMPNet如何提升双臂灵活性?
IEEE Transactions on Robotics | 从固定笛卡尔限幅到能力感知规划:让协...
2026-05-04 12:30
机器人与控制前沿
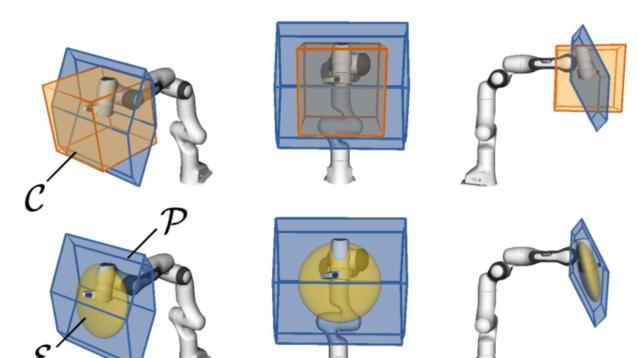
IEEE Transactions on Robotics | 从固定笛卡尔限幅到能力感知规划:让协作机器人充分释放运动性能
IEEE Transactions on Intelligent Transportation Sy...
2026-04-20 12:45
机器人与控制前沿
IEEE Transactions on Intelligent Transportation Systems | 软地形轮式机器人头疼的问题,力-速度混合控制
Mechanism and Machine Theory | 会直行、会转向、会旋转,还能爬坡拖载:...
2026-04-19 12:55
机器人与控制前沿
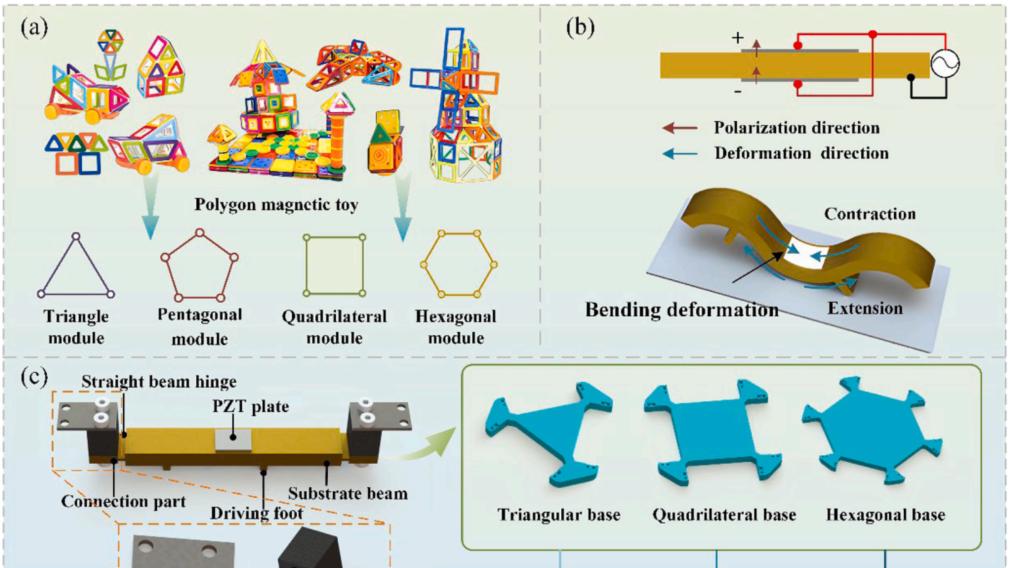
Mechanism and Machine Theory | 会直行、会转向、会旋转,还能爬坡拖载:一种可重构压电机器人新方案
IEEE Transactions on Robotics | 避障、平滑、多模态还能一起做?机器人...
2026-04-18 12:50
机器人与控制前沿
IEEE Transactions on Robotics | 避障、平滑、多模态还能一起做?机器人运动规划扩散模型给出了新答案
Science Robotics | 为月球熔岩管探索打造的“变形金刚”车轮,从230mm变500m...
2026-04-17 12:20
机器人与控制前沿
Science Robotics | 为月球熔岩管探索打造的“变形金刚”车轮,从230mm变500mm,不用充气、不怕跌落、能大能小
Applied Mathematical Modelling | 轮式机器人一遇扰动就跑偏?这篇论文...
2026-04-16 12:30
机器人与控制前沿
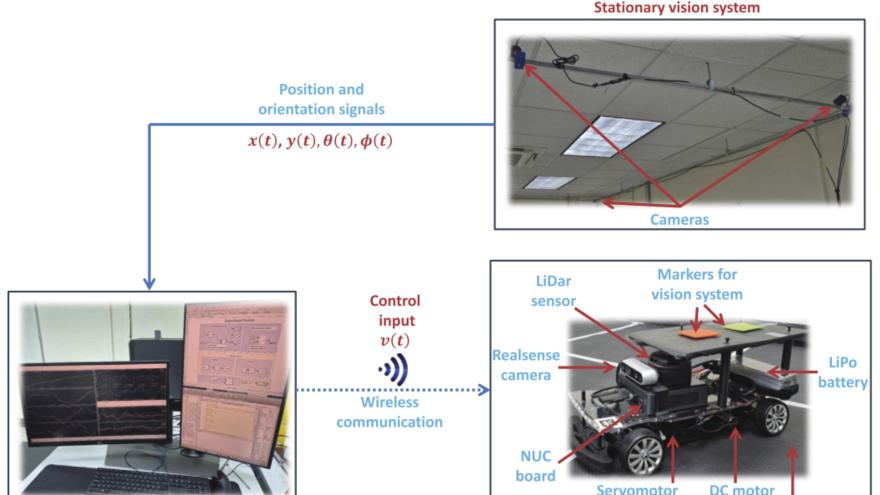
Applied Mathematical Modelling | 轮式机器人一遇扰动就跑偏?这篇论文用观测器+延迟控制把问题拆开了
Mechanism and Machine Theory | 从“只求快”到“又快又准”:6轴机器人...
2026-04-15 12:25
机器人与控制前沿
Mechanism and Machine Theory | 从“只求快”到“又快又准”:6轴机器人进给速度规划只用两步线性规划
IEEE/ASME Transactions on Mechatronics | 折纸-锯齿气动软体...
2026-04-14 12:55
机器人与控制前沿
IEEE/ASME Transactions on Mechatronics | 折纸-锯齿气动软体执行器:让软体机器人实现变形、抓取、爬行、游泳
第一页
作者信息
机器人与控制前沿
随心而写,随性而记!
分类: 科技
热门分类
推荐
热榜
军事
NBA
体育
社会
明星八卦
娱乐
财经
科技
汽车
历史
国际
游戏
动漫
公益
搞笑
商业
互联网
数码
国际足球
房产
家居
时尚
科学探索
职场
育儿
股票
教育
影视
情感
热点
中国军情
武器
中国南海
中国足球
亚洲杯
科比
综合体育
CBA
投资
楼市
大咖秀
外汇
创业
风口
SUV
豪车
概念车
优惠
新能源
美国
欧洲
朝日韩
俄罗斯
孕期
街拍
恋爱攻略
婚姻
正能量