
英文题目: A novel time-optimal feedrate planning method for robots with contour error constraints
中文题目: 一种考虑轮廓误差约束的机器人时间最优进给速度规划方法
作者: Qi Qi, Jixiang Yang, Wenhao Li, Han Ding
作者单位: 华中科技大学机械科学与工程学院,智能制造装备与技术全国重点实验室
期刊:Mechanism and Machine Theory(IF 5.2,中科院一区,JCR Q1)
发表时间: 2025年10月21日
链接: https://doi.org/10.1016/j.mechmachtheory.2025.106227
引文格式: Qi Q., Yang J., Li W., Ding H. A novel time-optimal feedrate planning method for robots with contour error constraints[J]. Mechanism and Machine Theory, 2025, 217: 106227.
01 全文速览
很多机器人轨迹规划方法,核心目标都很直接:在速度、加速度、加加速度、关节力矩这些约束下,把机器人跑得尽可能快。
但工程上真正棘手的问题是:机器人“跑得快”并不等于“轮廓跟得准”。控制环节带来的关节跟踪误差,会通过运动学映射到末端,最后表现为加工、焊接、切割时最要命的那件事——轮廓误差。而已有很多方法,更多管的是“驱动能力边界”,没有把“轨迹精度边界”真正纳入进给规划。
这篇论文做的事情很值得机器人控制圈认真看一眼:
它不是在运动结束后再去补误差,也不是简单粗暴地把整条轨迹降速,而是直接把轮廓误差预测模型嵌进时间最优进给速度规划里,把“又快又准”放进同一个优化框架。
核心亮点:
✅将轮廓误差直接纳入机器人时间最优进给速度规划。不再只追求“跑得快”,而是把末端轮廓精度作为规划阶段的硬约束一并优化。
✅建立了“关节跟踪误差—末端轮廓误差”的线性预测模型。基于跟踪误差模型和 Frenet 标架,实现了轮廓误差的离线预测,为误差约束规划提供了基础。
✅提出缩放估计线性化方法,解决复杂非线性约束难处理的问题。将 jerk、关节力矩和轮廓误差等非线性约束统一转化为更易求解的线性形式,降低了规划难度。
✅提出两步线性规划策略,在保证精度的同时进一步提升运动效率。先求中间解,再二次优化,更充分利用约束容限;实验表明其效率优于已有方法,也优于单纯靠限速保精度的策略。
更关键的是,论文不是停留在仿真层面,而是在 UR10 机器人上做了实验验证。结果表明,这一方法不仅能让轮廓误差明显下降,而且相对“单纯限速保精度”的办法,还能把效率再往上拽一截。对做机器人加工、焊接、喷涂、打磨、跟踪控制和轨迹规划的人来说,这篇文章有很强的参考价值。
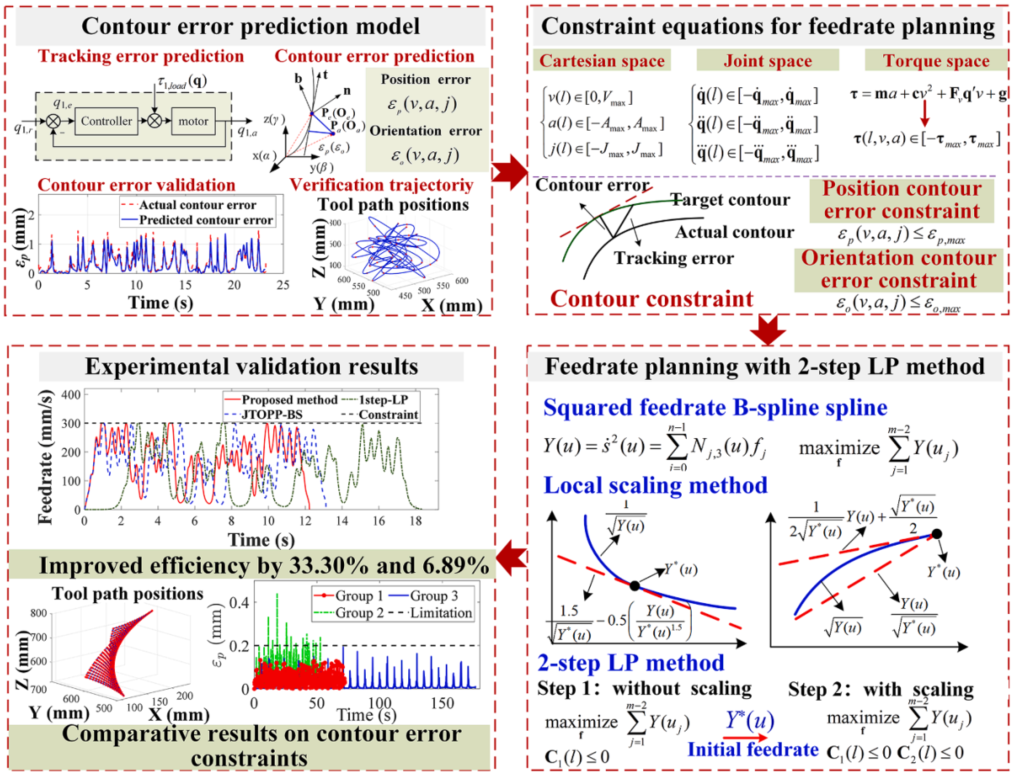
图1:轮廓误差约束下的进给速度规划方法综述。
02 研究内容
2.1 这篇文章到底在解决什么问题?
机器人轨迹规划里,时间最优的经典目标可以写成:
其中,v 是沿路径弧长l 的进给速度。这个目标本身不复杂,难的是约束很多:末端有速度、加速度、jerk 约束,关节侧有速度、加速度、jerk、力矩约束,现在作者又额外引入了位置轮廓误差和姿态轮廓误差约束。于是问题一下子变成了一个典型的高维、非凸、非线性优化问题。
作者指出,过去很多工作已经会管关节跟踪误差,但对于 6 自由度串联机器人来说,真正影响加工/作业质量的,往往不是单轴误差本身,而是末端相对于目标轮廓的综合偏差。这也是为什么“只看驱动边界”的进给规划,在高精度作业里经常不够用。
2.2 论文的核心思路:先把误差“看见”,再把它“管起来”
作者先从控制回路出发,建立了关节跟踪误差预测模型。其基本思想是:
关节误差由两部分组成,一部分来自参考输入,一部分来自外载荷扰动;两者都可以通过低频展开后写成与关节速度、加速度、jerk,以及载荷力矩导数相关的三阶近似模型。论文最终把关节跟踪误差写成了一个三阶预测形式,这一步的意义在于:误差不再只是实验后验量,而变成了规划阶段可计算、可约束的量。
接下来,作者再通过雅可比矩阵,把关节误差映射到末端位姿误差;然后借助轨迹的 Frenet 标架,把末端误差投影到轮廓法向方向上,于是得到位置和姿态轮廓误差的预测表达。论文中给出的关键形式可以概括为:
这一步很漂亮,因为它把原来比较“几何”的轮廓误差,转成了更适合进入优化约束的表达。
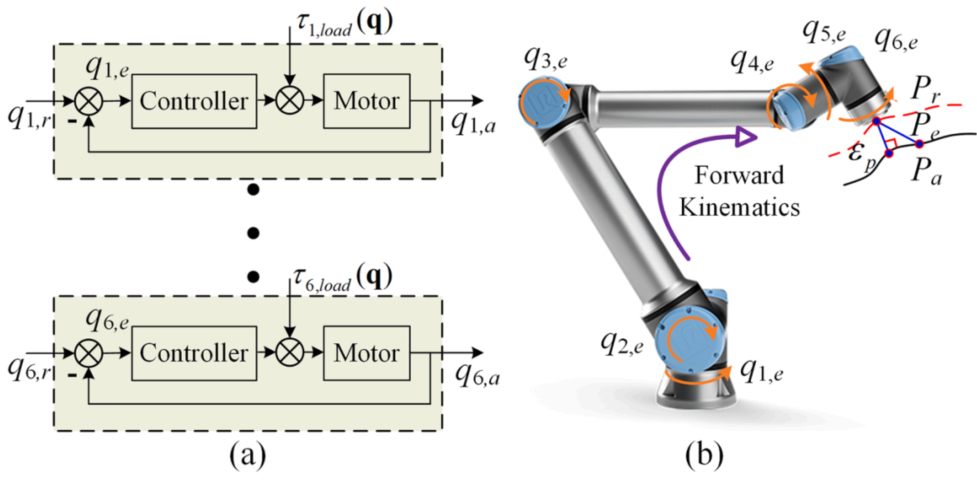
图2 机器人跟踪误差图:(a)各关节控制框图;(b)跟踪误差和轮廓误差之间的关系。
如图2所示,作者不是把轮廓误差当成黑箱,而是从关节控制误差如何一步步传到末端轮廓这个链条来建模。
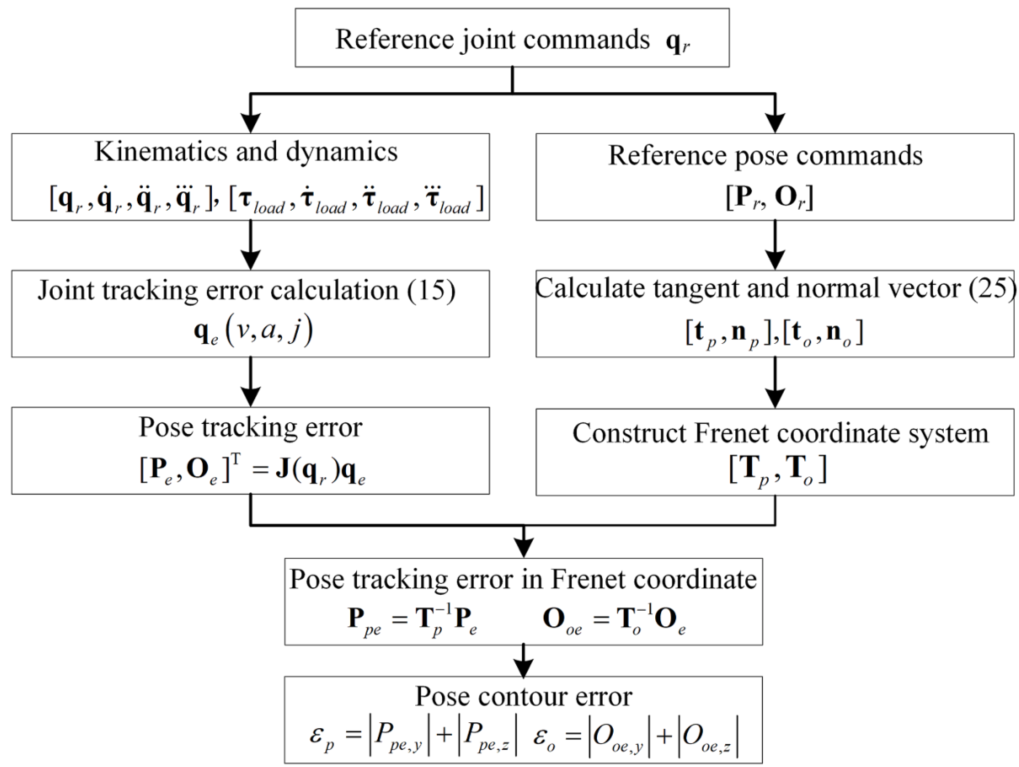
图3:进给速度规划中轮廓误差预测模型的流程图。
如图3所示,轮廓误差预测模型已经被嵌入到进给规划流程内部,而不是放在规划之外做事后分析。
2.3 真正聪明的地方:把“速度”换成“速度平方”
如果直接拿

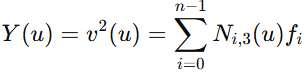
也就是说,作者不用速度本身建模,而是用速度平方的B-spline曲线来表示进给规律,优化变量变成一组控制点 f_i。这样做的好处有两个:
第一,目标函数更容易转成线性形式;
第二,B-spline 的导数仍然可以用控制点线性表示,后续构造约束会方便很多。
论文把原本“最小时间”的目标,转成了“让检查点上的 (Y(u)) 总和尽量大”,从而把问题推进到线性规划可处理的方向上。这个思路本质上是在说:速度平方比速度本身更适合作为进给规划的优化载体。
2.4 两步线性规划,到底妙在哪?
真正麻烦的地方在于,jerk 约束、关节力矩约束、轮廓误差约束里,都还残留着

第1步LP:先在“不含中间变量”的约束下,求出一个中间伪速度曲线

第2步LP:再以
这背后的控制/优化直觉非常明确:
先求一个“靠谱但不激进”的解,再围绕它做局部尺度估计,尽量把约束容限吃满。相比那种一次性线性化,这种两步法更容易减少保守性,也更能把 jerk 和误差容限真正用起来。
2.5 这篇论文的“算法伪代码”,可以怎么理解?
论文 Algorithm 1 的核心流程,其实可以压缩成下面这版:
输入:离散路径点、末端约束、关节约束、轮廓误差约束
输出:机器人插补关节命令q(l(t))
Step 1计算路径总弧长,构造速度平方B-spline曲线
Step 2在各检查点计算Frenet标架、逆运动学、动力学量
Step 3第一次LP:仅考虑基础线性约束,得到中间曲线Y(u)
Step 4用Y(u)对sqrt(Y)、1/sqrt(Y)等非线性项做局部缩放线性化
Step 5第二次LP:加入jerk、力矩、轮廓误差等约束,求最终Y(u)
Step 6将Y(u)离散成插补指令,输出关节轨迹
如果用一句话概括,这个算法不是“硬求最优”,而是先建一个足够好的近似支点,再在支点附近把复杂约束吃得更充分。这也是它能同时兼顾速度和精度的关键。
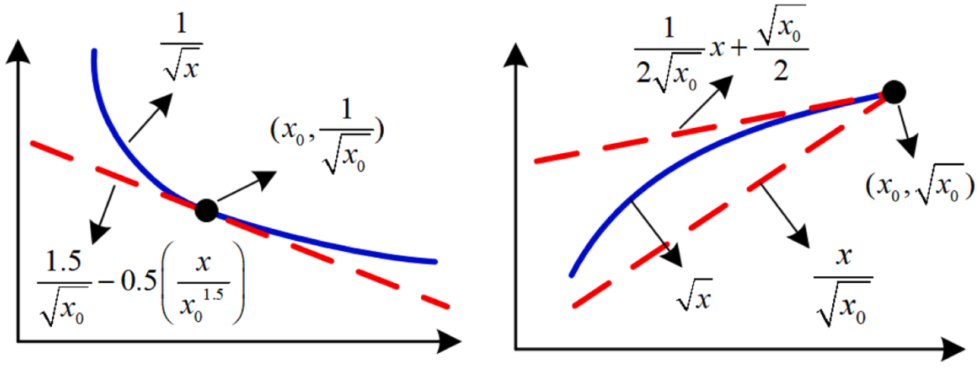
图4 扩展策略示意图。
如图4所示,作者用局部缩放策略处理


2.6 实验怎么做的?可信度怎么样?
作者在 UR10 机器人 上完成验证,负载为 3 kg,重复定位精度为 ±0.1 mm,插补周期 8 ms,并通过 RTDE 接口执行关节插补命令。为保证跟踪性能,实验里控制参数设置为 look-ahead time 0.03 s、proportional gain 1000。这个实验条件对做工业机器人控制的人来说,是比较有现实感的。
在正式对比实验之前,作者先做了误差模型辨识和验证。结果显示,轮廓误差预测的 MAE 为 0.096 mm / 0.209 mrad,RMSE 为 0.126 mm / 0.293 mrad。这意味着:虽然模型不可能完美,但已经足以支持“把轮廓误差写进规划约束”这件事。
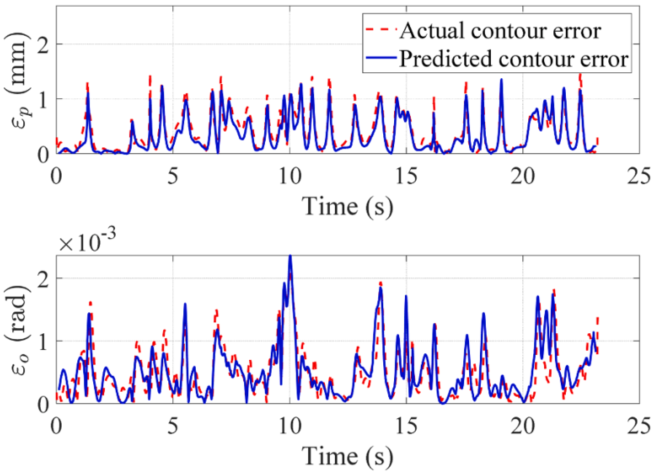
图5: 轮廓误差预测的结果。
如图5所示,预测值和实际轮廓误差总体吻合,这为后续“误差约束型进给规划”提供了基础。
2.7 最值得看的结果:效率和精度,真的没再被迫二选一
(1)Butterfly 轨迹:先证明它真的更会“跑”
在 butterfly 轨迹上,作者先把所提方法和两种已有规划方法对比。结果是:
所提方法平均进给速度173.064 mm/s,运动时间12.224 s;
而1step-LP为115.429 mm/s、18.328 s;
JTOPP-BS为161.147 mm/s、13.128 s。
论文据此给出的结论是:相较两类传统方法,所提方法在这一实验轨迹上的运动效率提升了 33.30% 和 6.89%。
这说明两步 LP 不是“形式上更复杂”,而是真把约束容限利用率做上去了。尤其对那些 jerk 受限、力矩受限的高速轨迹任务,这种差别是有工程意义的。
(2)Butterfly 轨迹:再证明它不是靠“盲目降速”换精度
论文设置了三组对比:
Group 1 是所提方法;
Group 2 不考虑轮廓误差约束;
Group 3 则采用“把最大进给速度直接降下来”的传统保守策略。
结果很有说服力。相对不考虑轮廓误差约束的 Group 2,所提方法把最大/平均位置轮廓误差从 1.659/0.370 mm 降到 0.719/0.219 mm,把最大/平均姿态轮廓误差从 6.052/0.877 mrad 降到 1.795/0.449 mrad,对应降幅分别达到 56.67% / 40.81% 和 70.34% / 48.80%。当然,代价是运动效率相对 Group 2 有 40.77% 的下降。
但更关键的是,相比 Group 3 那种“靠硬限速保精度”的办法,所提方法在满足误差要求的前提下,效率还能提升 32.10%。这就说明它不是单纯慢下来,而是更聪明地慢、在该慢的地方慢。
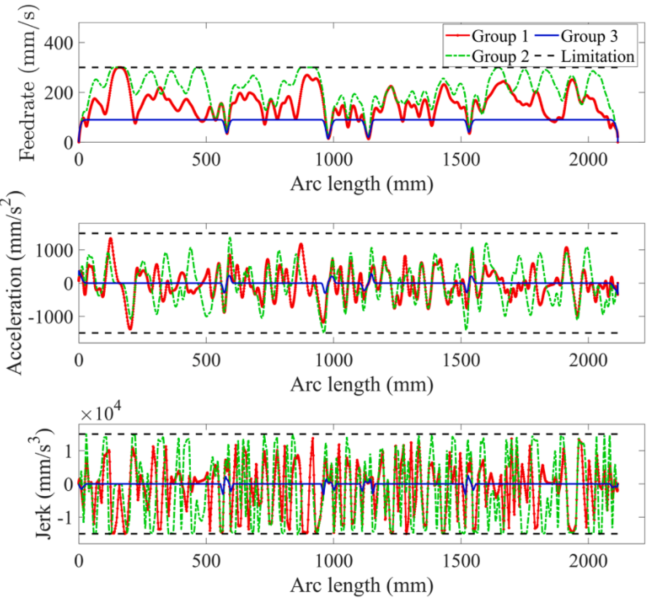
图6:沿弧长的进给速度、加速度和加加速度的规划结果。(第1组:提出的方法,第2组:没有轮廓误差约束的进给率优化,第3组:限制最大进给率以满足轮廓误差约束)。
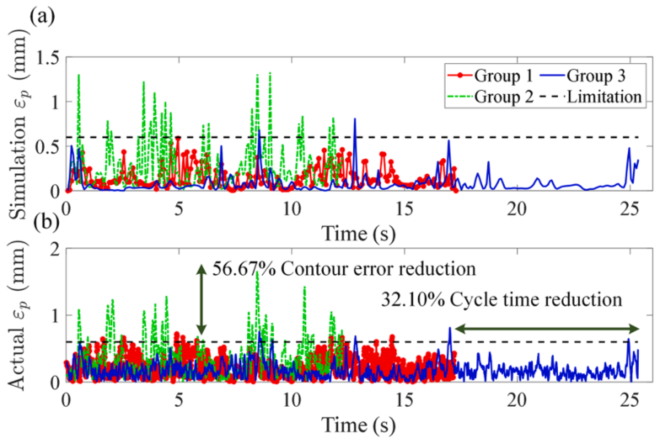
图7:位置轮廓误差的结果:(a)仿真结果;(b)实际结果。
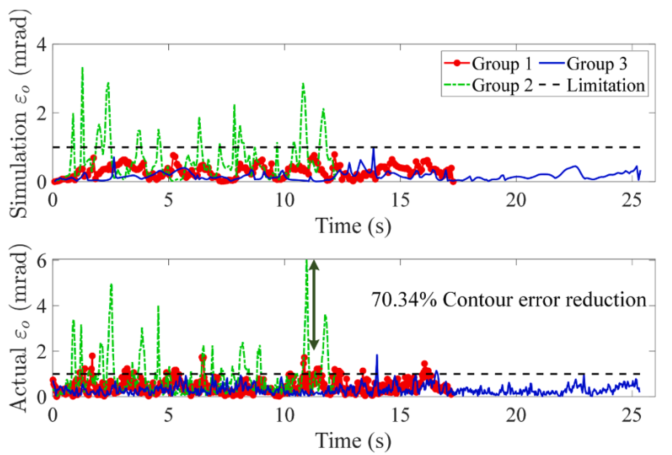
图8 :定向轮廓误差的结果:(a)模拟结果;(b)实际结果。
如图6—图8所示,所提方法并不是全局压低速度,而是在误差敏感区主动收敛,在其他区段尽量保留效率。
(3)Blade 轨迹:进一步证明“位置+姿态”误差都能管
在 blade 轨迹实验中,论文进一步验证了位置轮廓误差和姿态轮廓误差同时受限时,方法仍然成立。相对不考虑轮廓误差约束的 Group 2,所提方法把最大/平均位置轮廓误差从0.426/0.144 mm降到0.255/0.084 mm,降幅40.14% / 41.67%;把最大/平均姿态轮廓误差从3.769/0.973 mrad降到1.786/0.564 mrad,降幅52.61% / 42.03%。与此同时,运动效率仅下降 33.64%。
更有意思的是,相比简单降低最大进给速度的 Group 3,所提方法在满足轮廓误差约束的条件下,运动效率提升了59.08%。这一点其实非常关键:
它说明这套方法不是“高精度下还能勉强跑”,而是已经展现出一种很明确的趋势——把精度约束转化为规划内部可计算约束之后,机器人就有机会从“保守控速”走向“精准调速”。
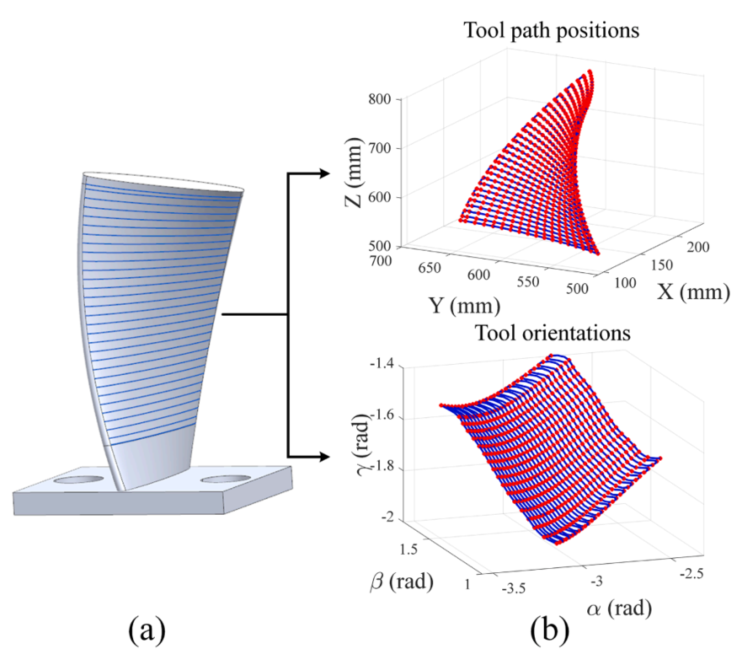
图9:叶片类型轨迹:(a)叶片模型;(B)由B样条拟合的轨迹。
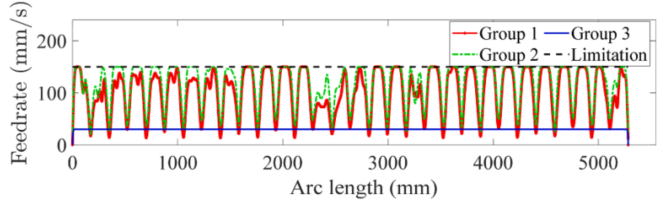
图10:叶片轨迹的规划结果。(第1组:提出的方法,第2组:没有轮廓误差约束的进给率优化,第3组:限制最大进给率以满足轮廓误差约束)。
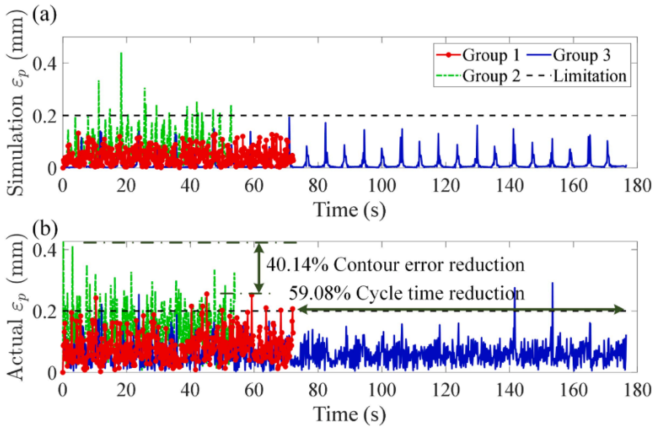
图11:位置轮廓误差的结果:(a)仿真结果;(b)实际结果。
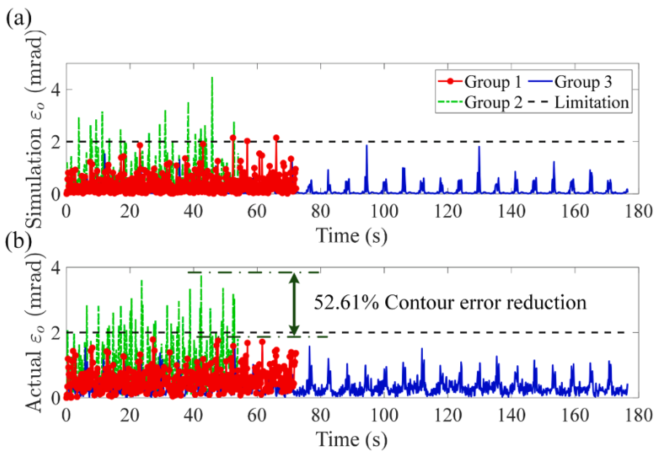
图12 :定向轮廓误差的结果:(a)模拟结果;(b)实际结果。
如图9—图12所示,blade 轨迹进一步验证了该方法对复杂位姿轮廓的适用性,尤其是姿态误差约束不再只是“附带考虑”。
03 创新点
这篇论文真正有价值的创新,我觉得可以概括成 4 点。
第一,它把“轮廓误差”从结果评价指标,变成了规划约束本身。
这是一个很重要的视角变化。过去很多方法是先规划、再看误差、再补偿;这篇文章则是在规划阶段就让误差进场。对机器人控制来说,这一步意味着规划层和控制层开始真正耦合。
第二,它把关节误差—末端误差—轮廓误差这条链条打通了。
作者不是凭经验调一个“安全进给速度”,而是从控制回路、载荷扰动、雅可比映射、Frenet 标架一路推下来,最后得到可用于优化的误差表达。这个框架非常像“面向精度的进给规划”。
第三,它提出了一个很实用的两步 LP 机制。
第一步先找中间解,第二步围绕中间解做局部缩放估计,减少了直接线性化的保守性。这一点在工程优化里很有味道:不是只追求“能解”,而是追求“解得不太亏”。
第四,它把“速度规划”和“控制精度”真正放在了同一张桌子上。
从机器人与控制的视角看,这篇文章最值得讨论的,不只是一个新算法,而是一种方法论:
高性能运动,不应该只由运动学和动力学边界定义,也应该由闭环跟踪精度来共同定义。
04 总结与展望
这篇论文最打动人的地方,不在于它把线性规划又做复杂了一点,而在于它抓住了机器人高精度运动里一个长期存在、但常常被割裂处理的问题:
速度规划归规划,轮廓精度归精度。
作者做的是把这两件事重新接上。
如果你做的是机器人加工、打磨、焊接、喷涂、跟踪控制,或者更一般的高精度轨迹执行,这篇文章会给你一个很清楚的启发:
未来真正有竞争力的轨迹规划,恐怕不只是“满足约束的最快”,而是考虑控制误差传播后的最快。这两者,看起来只差几个字,实际上是两种完全不同的系统观。
未来研究将聚焦于以下几个方向:
🔸 提高轮廓误差模型中非线性项的预测精度。
这是论文作者明确提出的下一步工作,因为实验中轮廓误差仍会受到摩擦、温度等时变因素影响,导致约束存在轻微超差。
🔸 增强对时变扰动和模型不确定性的鲁棒性。
这一点是从论文结果自然延伸出来的判断。既然误差预测受摩擦、温度、载荷变化影响,那么后续很值得和自适应/鲁棒控制、扰动观测器或学习型误差补偿进一步结合。这个方向是基于论文实验现象做出的技术延伸判断。
🔸推进到更强实时性和更广场景的在线应用。
论文当前已经说明该方法可适配不同机器人,只要引入相应的运动学与动力学模型即可。下一步很自然会走向更复杂工艺轨迹、更高维约束和更强实时性的在线规划部署。这里同样属于基于论文框架的合理延展。
在机器人高精度作业里,“轮廓误差约束前置到轨迹规划层”,会不会成为下一阶段机器人运动控制的一个主流方向?欢迎在留言区聊聊你的看法。
声明:本文仅供学术交流,版权归原作者所有。如有错误或侵权,请联系更正或删除,欢迎留言探讨。