英文题目:Soft deployable airless wheel for lunar lava tube intact exploration
中文题目: 用于月球熔岩管原位探测的软体可展开无气轮胎
作者:Seong-Bin Lee, Namsuk Cho, Geonho Lee, Seungju Lee, Junseo Kim, Gyujin Shim, Jong Tai Jang, Se Kwon Kim, TaeWon Seo, Chae Kyung Sim, Dae-Young Lee
作者单位: 韩国科学技术院(KAIST)、韩国航空航天研究院、庆北大学、汉阳大学等
期刊:Science Robotics(IF 27.5中科院一区,JCR Q1)
发表时间:2025年12月17日
链接:https://www.science.org/doi/10.1126/scirobotics.adx2549
引文格式:Lee S B, Cho N, Lee G, et al. Soft deployable airless wheel for lunar lava tube intact exploration[J]. Science Robotics, 2025, 10(109): eadx2549.
01 全文速览
月球熔岩管是未来人类栖息地的理想选址——天然屏蔽宇宙辐射、抵御微陨石、缓冲极端温差。但要进入这些熔岩管,探测器必须先翻过漏斗状陡坡、越过垂直悬崖、穿过崎岖落石区。传统刚性车轮要么太重,要么无法折叠收纳,要么在复杂地形中卡住。
韩国KAIST团队提出了一款软体可展开无气轮胎。图1 展示了车轮在熔岩管探测任务中的使用场景:从着陆器释放、在坑缘部署、展开后驶入熔岩管。
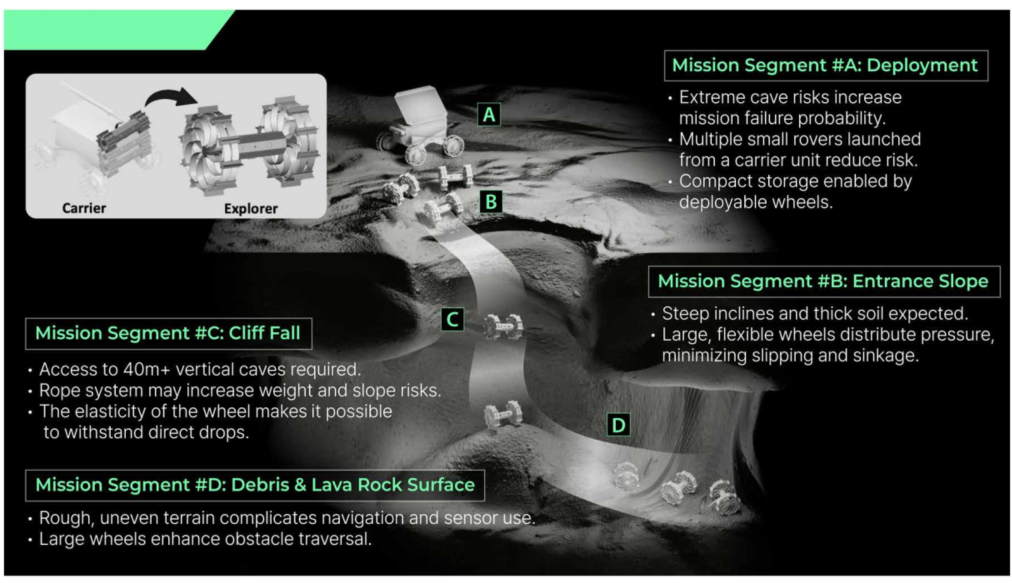
图 1 月球坑探测任务场景。提出了进入和探索月球坑的任务方案,并描述了实施该方案所需的四个关键操作环节。(A )"部署"侧重于通过从运载装置发射多辆配有可展开车轮的小型火星车来减轻极端的洞穴风险。(B)"入口斜坡"解决了陡坡和致密土壤的问题,利用大而灵活的轮子分散压力,减少滑动和下沉。(C )"悬崖坠落",目标垂直落差超过40米;相比之下,绳索系统可能会引入额外的质量并导致斜坡不稳定,车轮的弹性有助于其承受直接坠落的冲击。(D)“碎片和熔岩表面”确保了在崎岖不平的地形上的稳健导航,在这种情况下,超大车轮有助于越过障碍。
该车轮由弹性钢带编织成螺旋互锁结构,利用材料本身的连续变形实现形状变换,完全摒弃了传统折纸或铰链结构中的易损关节。图2A 展示了车轮结构:左右轮毂可反向旋转,钢带穿过履刺块(grouser)的狭缝相互交织,形成可收放的轮辐和轮辋。图2B 展示了单根钢带从展开到收纳的形状变化,图2C 展示了多根钢带的组装和收纳过程。
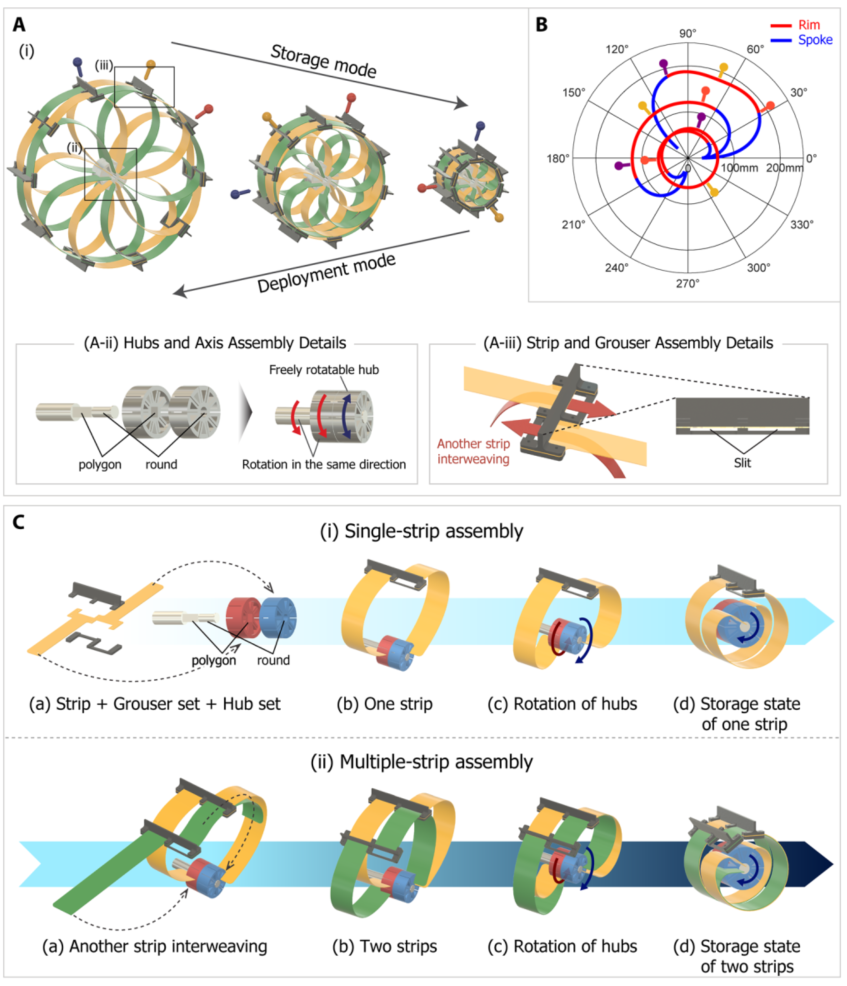
图 2 车轮结构和卷绕机构的几何描述。(A)具有不同形状模式的柔性可展开轮结构:(I)用于展开和存储的卷绕机构,通过(ii)专用轮毂组、轴和(iii)抓地齿设计(图示的轮模型:轮毂半径,30mm;10条;条带长度,200毫米;条带宽度,30毫米)。(B )( A)中所示的单个条带的形状分析。(C)车轮装配顺序和卷绕机构的详细说明:(I)单带装配和(ii)多带装配。
Movie S1—— 车轮收纳与展开的卷绕机制
本视频展示了车轮从展开状态到收纳状态的完整卷绕过程。左右轮毂反向旋转,弹性钢带被逐渐卷入轮毂中心,车轮直径从 500 mm 缩小至 230 mm。由于钢带弯曲应变能在收纳状态下增加,系统在释放后会因弹性能自动返回展开状态,无需额外驱动。这一被动展开特性在空间应用中尤其宝贵——节省了执行器、布线和控制复杂度。
车轮收纳直径仅230mm,展开后达500mm(展开比2.17)。在实验验证中,车轮成功爬上200mm高的阶梯障碍、在模拟月球土壤上稳定行驶、承受相当于月球重力下100米坠落的冲击(等效动量36.1 N·s),并通过了423K热真空测试。
核心亮点:
✅ 全软体无关节:弹性钢带编织结构,无铰链、无齿轮,避免月尘卡滞和低温冷焊
✅ 大变形比:230mm → 500mm,收纳紧凑,便于多车堆叠发射
✅ 抗冲击性强:通过4米地球重力跌落测试(模拟月面100米坠落)
✅ 热适应性好:在423K热真空下性能衰减<5%,可耐受~100K月夜低温
✅ 牵引力充足:模拟月壤上最大牵引力>10N,可爬10°斜坡
02 研究内容
🧬 2.1 设计原理:弹性钢带编织的“互反结构”
传统可变形车轮多依赖折纸折痕或旋转铰链,这些刚性关节在月尘、低温、冲击下极易失效。作者采用弹性钢带连续变形的思路,将多根钢带通过履刺块上的狭缝相互交织,形成螺旋状互锁结构。
图2Ai 展示了轮毂的反向旋转驱动:左侧轮毂自由旋转,右侧轮毂固定于驱动轴,两者相对转动时,钢带被卷入或放出,实现收纳和展开。图2Aiii 中的履刺块狭缝允许钢带滑动并相互交织,既保证了结构整体性,又允许大范围变形。
图3A 是车轮结构分析的自由体图,将单根钢带视为大挠度悬臂梁,约束点包括前后相邻钢带的接触点以及轮毂固定点。通过求解弯曲应变能,可以预测收纳扭矩和垂直刚度。图3B 和 3C 分别验证了收纳扭矩和垂直载荷的理论模型,实验与理论高度吻合。
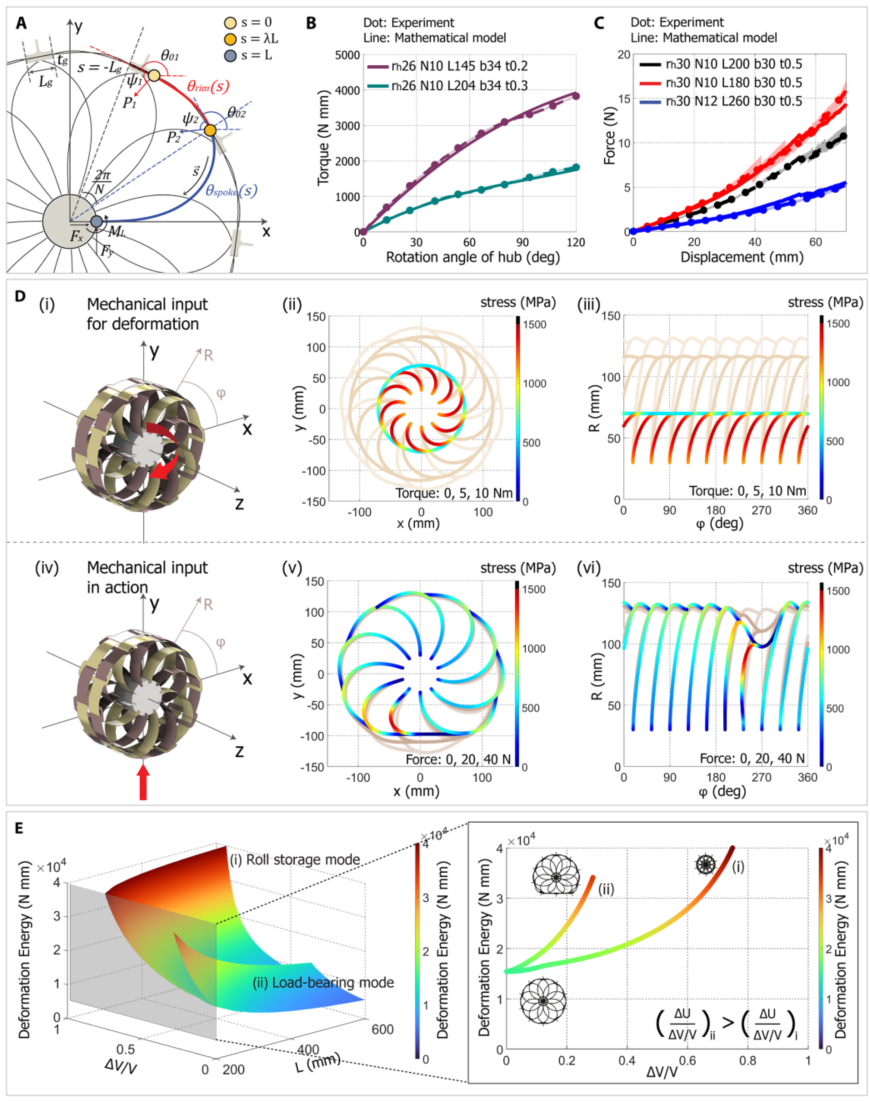
图 3 车轮的结构分析。(A)用于交互柔性可展开轮结构分析的悬臂梁的自由体图(FBD)。(B)通过车轮转换扭矩测试验证FBD分析。(C)通过测试车轮负载能力验证标准化结构弹性矩阵(Ew)。对于(B)和(C ),阴影带表示重复测量的全范围(最小到最大),虚线表示平均值(n = 5)。(D)车轮在展开、存放和垂直加载状态下的形状和应力。(I)展开至存放过渡状态;(ii)来自FBD分析的笛卡尔和(iii)极坐标表示。(iv)展开至垂直加载过渡;(v)来自多柔性体动态模拟的笛卡尔和(vi)极坐标表示。(E)在两种不同变形模式下的能量比较,(I)储存和(ii)承载能力:互逆结构实现了双重刚度水平和各向异性特性,而不需要额外的接头来调节刚度
图3D 展示了钢带在展开、收纳和垂直加载三种状态下的位置与应力分布(笛卡尔坐标和极坐标)。图3E 比较了两种变形模式(收纳 vs 承载)的能量需求:收纳所需能量远小于承载,实现了“易收纳、高承载”的各向异性力学特性。
📐 2.2 参数化设计:无量纲比指导选型
车轮性能由两个关键参数决定:展开比




图4A-4B 展示了在不同无量纲比下,展开比和结构刚度的变化趋势。图4C 显示增加宽度b可以扩展性能边界。图4D-4F 显示增加钢带数量N同样提升性能,但会带来额外重量。
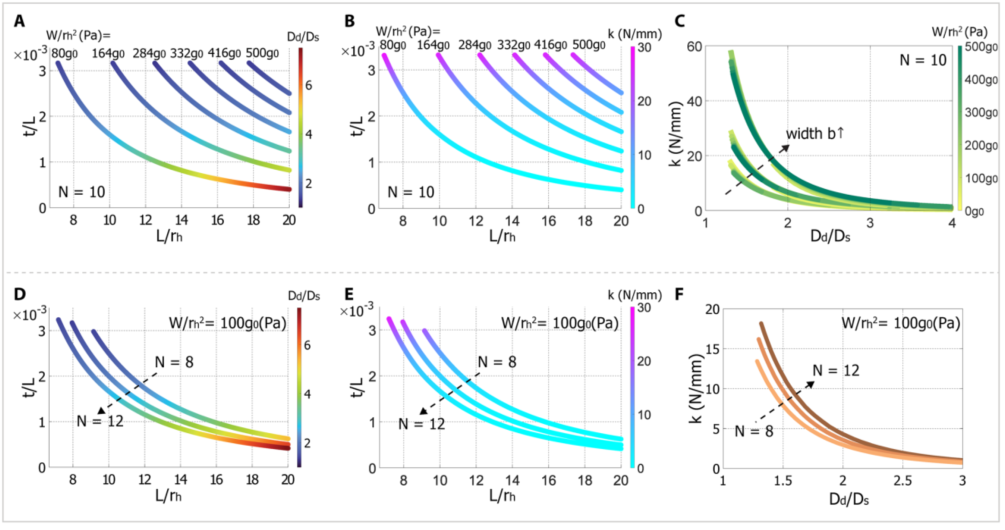
图 4 设计参数L/rh和t/L的分析结果。(A)如何选择设计参数以实现所需的W和车轮性能Dd/Ds和(B)结构弹性(b = 50 mm)。(C)Dd/Ds和结构弹性的权衡:宽度b扩展性能极限(b = 30、50和100 mm)。增加条带数N提高了性能(D) Dd/Ds和(E)结构弹性(b = 50 mm)。(f)随着𝑁的增加,性能极限扩大,但存在车轮总重增加的风险,这在图表中没有反映出来(b = 50毫米)。
🌡️ 2.3 热特性分析
月球表面温差极大,车轮的热行为直接影响任务可靠性。作者以Marius Hills Pit为任务场景,使用Thermal Desktop建立42天热模型,考虑了月壤热物性随深度和温度的变化、太阳辐射角度变化等。
图5A-5C 展示了热模型设置和太阳辐照度变化。图5D 展示了中午时刻车轮的温度分布,阳光直射区域与自遮阳区域温差高达150K。图5E 标出了温度传感器位置(G1/G2为履刺块,S1-S3为钢带,Hub为轮毂)。图5F 显示了各测点在一天中的温度变化:被遮挡的G2中午仅约348K,而暴露的G1高达493K。
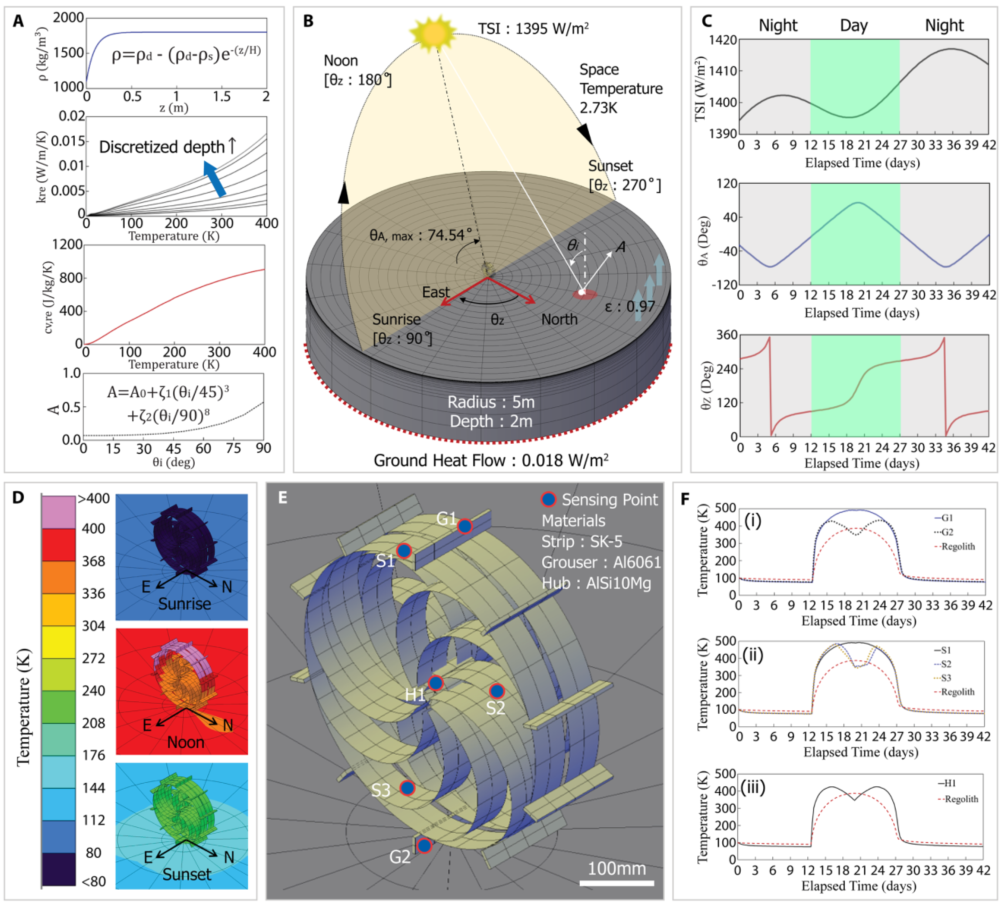
图 5 车轮热分析条件和结果。(A)任务区月壤的热物理和热光学特性。(B)月壤热模型、分析条件和太阳辐射。(C)42天任务期间的太阳总辐射、太阳仰角和太阳方位角。(D)热分析结果显示了车轮在太阴日不同时间的温度等高线:日出、正午和日落。(E)从(B)扩展的车轮热模型,显示材料成分和温度感应点;在松鸡上,暴露在阳光下和自我遮蔽的位置被标记为G1和G2,在条带上被标记为S1到S3。标尺,100 mm. (F)在(E)中每个感应点的温度变化;(I)抓地齿,(ii)板条,和(iii)轮毂。
🧪 2.4 实验验证
图6A 展示了热真空测试(423K, 10⁻¹ torr, 24小时)。图6B 展示了垂直跌落冲击测试(9.30kg重物从770mm高处跌落,等效月面100米坠落)。图6C-6D 显示单一样本在测试后收纳扭矩和承载能力变化在±5%以内。图6E-6F 展示了五个样本的统计结果(箱线图),验证了车轮在极端环境下的鲁棒性。
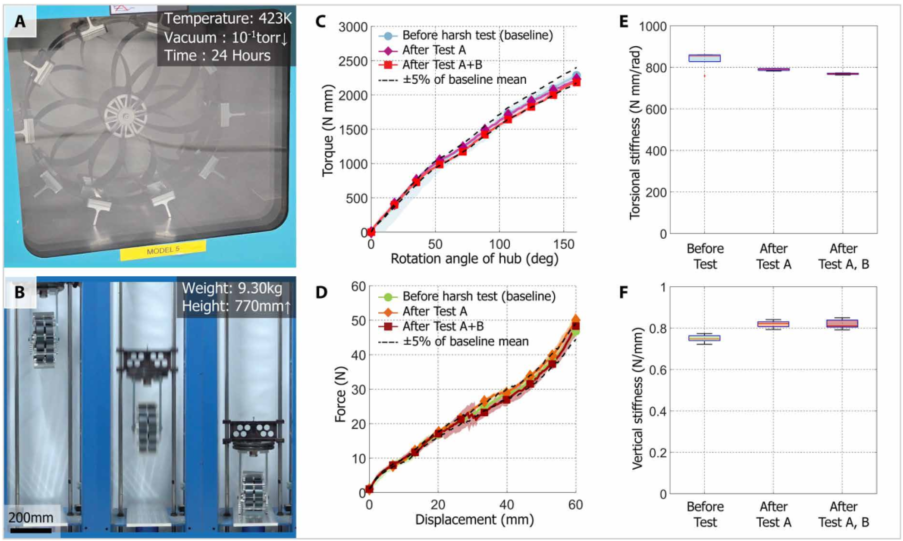
图 6 任务方案可行性的实验验证。进行了两项关键试验:(A)423K、10-1托下的热真空室试验和(9.30千克、770毫米以上高度的垂直下落冲击试验。比较了单个样品的200 mm比例尺(C)存储扭矩和(D)垂直负载能力。对于(C)和(D ),阴影带表示重复测量的全范围(最小到最大),标记线表示平均值[n = 1(样本)× 5(重复)= 5 ),表明在两次严格测试前的5%(虚线)范围内性能一致。使用箱线图比较了五个样品在储存期间的(E)扭转刚度和(F)有效载荷下的垂直刚度。对于(E)和(F),方框表示四分位数范围(Q1到Q3),每个方框内的线表示中间值,触须表示实验数据的全范围(最小到最大)[n = 5(样本)× 5(重复)= 25],证明了车轮在恶劣条件下的鲁棒性,并支持其在月球熔岩管探测任务中的潜力。
Movie S2 —— 跌落冲击测试(4 米地球重力)
本视频记录了车轮从 4 米高度垂直跌落的测试过程(等效月球重力下约 100 米坠落)。车轮在收纳状态下被释放,撞击地面后轮毂和钢带均未出现断裂或永久变形。测试后车轮仍能正常展开并承受负载。这一结果证明了编织钢带结构的抗冲击能力,远超传统含铰链的刚性可变形轮。
图7A-7B 展示了在模拟月壤KOHLS-1上的牵引力测试平台和不同滑移率下的车轮沉陷情况。图7C 给出了不同滑移率下的牵引力,图7D 给出了驱动扭矩。结果表明,车轮在滑移率≤0.5时可提供足够牵引力,支持4kg两轮车爬上约10°斜坡。
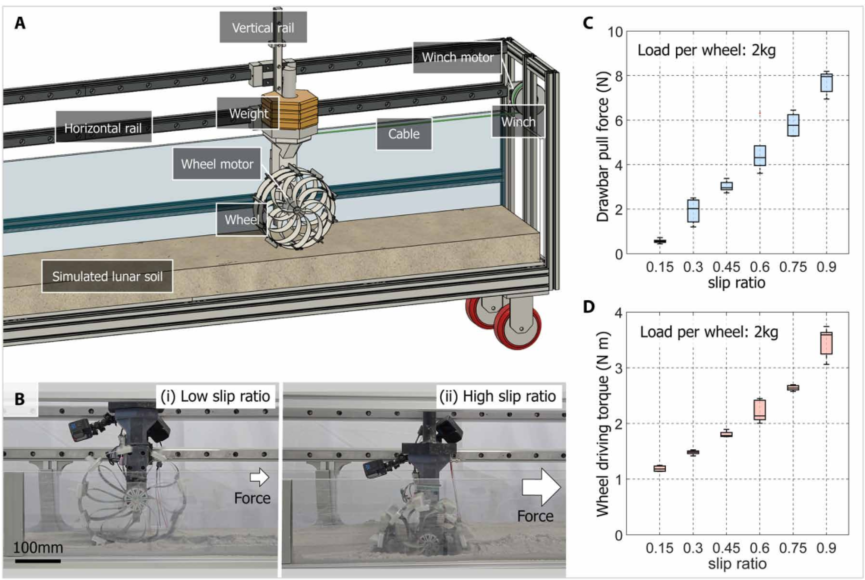
图 7 模拟月壤中牵引杆拉力试验和通过性评估。(A)开发了牵引杆拉力测试平台,以评估在模拟月壤地形中的性能。牵引杆拉力由绞车扭矩及其半径计算得出。垂直和水平轨道适应下沉和受限的向前驱动运动。模拟月壤KOHLS-1(韩国汉阳月壤模拟物-1)的分层深度大于车轮半径,以避免接触地面。(B)不同滑移率下牵引杆拉力试验的照片。标尺,100mm。(I)低滑动率显示最小下沉;(ii)高滑移率显示出大量下沉。(C)测量了牵引杆拉力与滑移率的关系和(D)驱动扭矩与滑移率的关系[n = 1(样本)× 5(重复)= 5,每个滑移率],表明牵引力也足以爬过10个斜坡。对于(C)和(D ),方框表示四分位数范围(Q1到Q3 ),每个方框内的线表示中位数,触须表示实验数据的全范围(最小到最大)。
🚀 2.5 现场测试
图8A 展示了搭载可展开车轮的两轮验证车系统组成(电源、通信、控制、驱动模块)。图8B 展示了在模拟月壤上的稳定行驶。图8C 展示了4米地球重力跌落测试后车轮仍正常工作。图8D 展示了爬越200mm高、34°倾角的阶梯障碍。图8E 在真实陆地洞穴的崎岖岩石地形上验证了通过性。图8F 展示了碳钢车轮在火焰环境中的耐高温性。
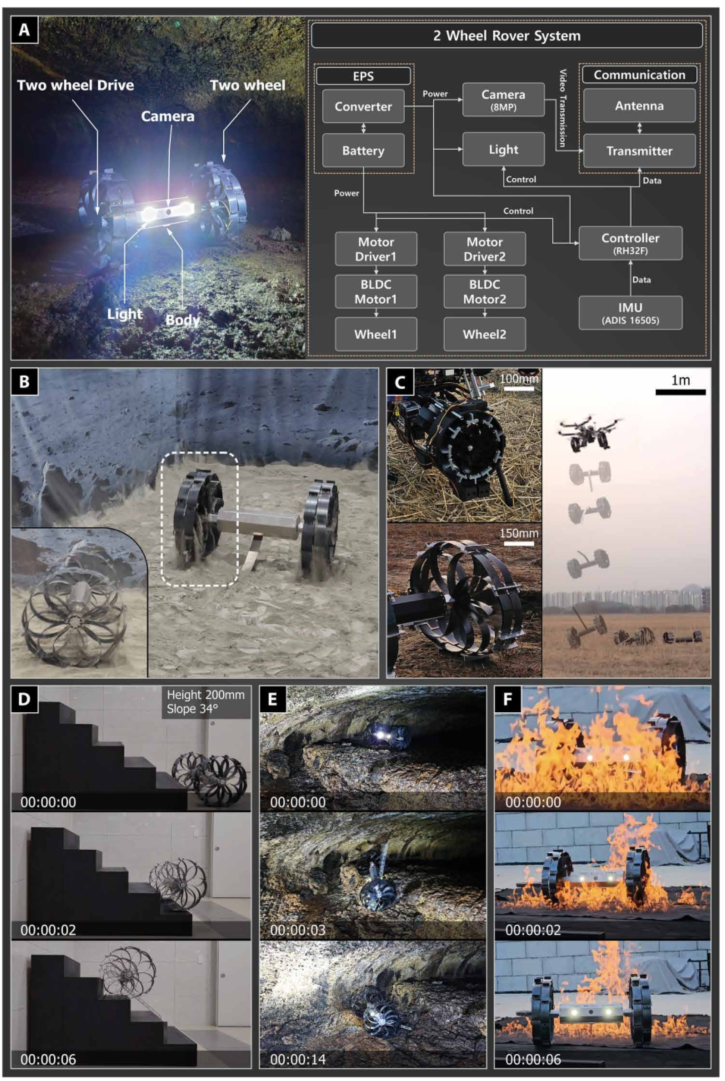
图 8 漫游者系统配置和现场测试。为了在极端条件下进行性能评估,对配备有软可展开轮的两轮虚拟漫游车进行了现场测试。(A)系统配置,包括电源、通信、控制和驱动模块,旨在支持月球洞穴环境中的导航和机动性。(B)在模拟月球土壤上行走证明了在多尘条件下的稳定性和对沙坑的抵抗力。(C)撞击弹性测试验证了月球车在地球重力作用下坠落4米后的结构完整性(装载状态比例尺,100毫米;展开状态比例尺,150毫米;跌落测试比例尺,1米)。(D)爬坡能力评估表明,月球车成功地克服了一个200毫米的台阶状障碍,坡度为34°。(E)在模拟月球洞穴条件的陆地洞穴内的不规则岩石地形上进行性能验证。(F)耐高温测试证实了车轮在极端高温环境下的耐用性。
Movie S3—— 模拟月壤上的稳定行驶
本视频中,搭载可展开车轮的两轮验证车在模拟月壤(KOHLS-1)上行驶。月壤表面松软、易陷,传统刚性车轮容易出现打滑或沉陷。视频显示车轮保持稳定牵引,无明显打滑,即使经过预先挖出的沙坑也能顺利通过。这验证了软体编织轮在低重力、松软地形下的良好通过性。
Movie S4—— 陆地洞穴崎岖岩石地形穿越
本视频在真实陆地洞穴(济州岛)的崎岖岩石地面上拍摄。车轮在布满尖角碎石和起伏台阶的路径上滚动,能够顺利翻越突出石块而不被卡住。视频中还展示了车轮经过松散碎石堆时,互锁钢带结构保持完整,没有出现钢带错位或脱出。这模拟了月球熔岩管内可能遇到的落石和断裂地形。
Movie S5—— 高温火焰环境耐受性测试
本视频中,车轮被暴露在丙烷火焰喷枪下,钢带被加热至暗红色。即使在这种极端高温下,车轮结构没有发生软化变形或断裂。冷却后,车轮仍能正常卷绕和展开。这一测试验证了碳钢材料在高温环境下的稳定性,对应月球白天车轮可能面临的约 423 K(150°C)以上温度。
03 创新点
① 全软体无关节的可展开结构
现有可变形车轮要么依赖刚性铰链(易磨损、易卡滞),要么采用折纸折痕(应力集中)。本文用弹性钢带编织成互反结构,变形时应变均匀分布在整个钢带上,没有局部应力集中点,也无需任何活动关节。这种“软体”定义并非指材料柔软,而是指结构通过连续变形实现形状变化。
② 各向异性力学特性
同一个结构在收纳模式下刚度低(易变形),在承载模式下刚度高(支撑车重)。图3E 的能量对比清楚展示了这一点——这是通过互锁结构的几何非线性自然实现的,无需额外的刚度调节机构。
③ 完整的无量纲设计方法论
将设计参数分组为

④ 严酷环境验证
通过了热真空(423K)、低温(~100K)、跌落冲击(等效月面100m)、月壤牵引力、岩石地形等多重测试。尤其是跌落冲击测试中,动量等效关系m v =常数 的设计思路值得借鉴。
⑤ 材料多样性
车轮结构不依赖特定材料,可根据任务需求选择不同弹性板材(钢、PEEK、Kapton、Mylar等)。作者比较了多种材料的

04 总结与展望
这篇Science Robotics文章的核心价值在于:用软体结构的连续变形替代刚性关节的离散运动,从而在极端环境中获得更高的可靠性。月球熔岩管探测要求车轮既能折叠收纳(多车堆叠发射),又能承受冲击和热循环,还要在松软月壤上提供足够牵引力。传统的刚性可变形轮很难同时满足这些条件。弹性钢带编织的软体轮提供了一个简洁而有效的解决方案。
目前的工作主要集中在车轮本身,整车的导航、自主控制、多车协同尚未深度集成。此外,车轮在真实月壤中的长期耐磨性还需要更多验证。
未来研究将聚焦于以下几个方向:
🔸整车集成与自主导航:将可展开车轮与SLAM、路径规划算法结合,实现熔岩管内的自主探测
🔸多车协同部署:利用车轮的高收纳比,在单次发射中堆叠多辆探测车,协同进入熔岩管
🔸材料优化:针对极低温(~100K)和强辐射环境,筛选更优的弹性材料(如铍铜合金、特种聚合物)
🔸主动刚度调节:在互反结构中加入可控阻尼或可变约束,实现行驶中对车轮刚度的主动调节
🔸原位资源利用:研究月球土壤附着对车轮牵引力和磨损的影响,探索自清洁胎面设计
在极端环境(如月球、火星、深海)的探测机器人设计中, “软体结构”和“刚性机构”哪个更具潜力?欢迎在评论区分享您的看法。
声明:本文仅供学术交流,版权归原作者所有。如有错误或侵权,请联系更正或删除,欢迎留言探讨。