#蔚来##4d舒适领航# #4D底盘#
蔚来最新专利公布了4D底盘的控制方法和逻辑,其中,悬架控制方法的描述如下:
[0117] 下面对上述悬架控制做进一步说明。
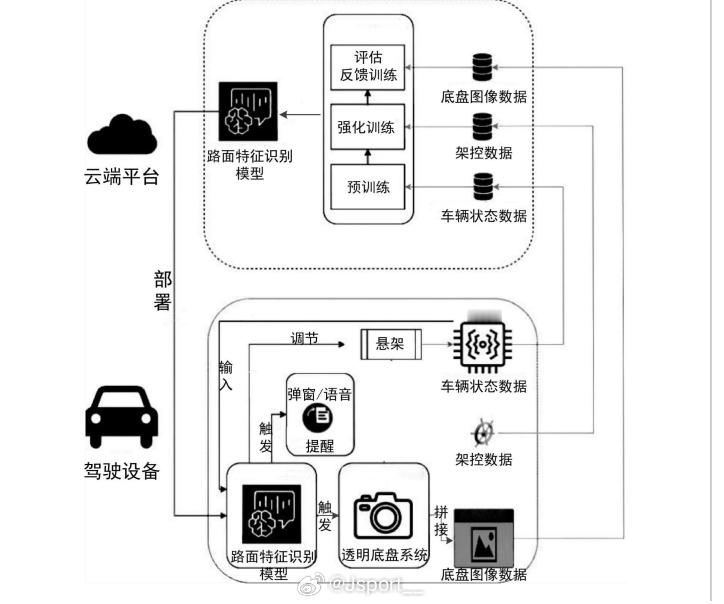
[0118] 在上述步骤S502的一些实施方式中,云端设备将路面特征识别模型远程部署到驾驶设备之后,驾驶设备可以将行驶数据输入路面特征识别模型,得到路面特征识别果。
[0119] 其中,路面特征识别结果可以包括正常路面和异常路面,在识别结果为异常路面时,还包括异常路面的类型,如减速带路面、障碍物路面(包括石块、井盖等)和坑洼路面(包括裂缝、积水、泥泞、起伏等)。
[0120] 进一步地,在上述步骤S503的一些实施方式中,当路面特征识别结果为异常路面时,可以基于异常路面的类型调节悬架的刚度、高度和阻尼参数中至少一种。
[0121] 其中,悬架的刚度决定了驾驶设备的稳定性和操控性,高度决定了驾驶设备的离地间隙和通过性,阻尼参数决定了驾驶设备的减震效果和行驶舒适性。
[0122] 调节悬架可以适应不同的路面状况和驾驶需求,提高驾驶设备的舒适性和安性。
[0123] 例如,在通过障碍物路面时,可以提高悬架的高度,减少驾驶设备与障碍物之间的距离;在通过颠簸路面时,可以增加阻尼参数,减少驾驶设备的颠簸和震动,提高行驶的舒适性。
[0124] 需要指出的是,以上关于调节悬架的举例只是示意性说明,在实际应用中,需要根据具体的路面情况和驾驶设备的行驶状态进行悬架调节,此处不做限定。
所以,根据上述,只有CDC的车辆,能调整的只有阻尼参数一项;
带空悬和CDC的车辆,如777,能调整的不仅有阻尼参数,还有车高,然而,对于单腔空簧,提高车高,刚度就一定上去了(万一控制策略需要降低刚度,岂不是矛盾了?);
最后,只有双腔空簧的ES8,才能完美解耦车高和弹簧刚度,实现三个主要参数的控制和调整,才是被动式4D底盘的最终解决方案。
同时,利用改款把所有777的空悬都双腔化,才能让更多人分享到4D成果,这事迫在眉睫。
#大v聊车# #汽场全开#