今年7月5日,在理想的智驾发布会上,理想发布了自己基于端到端模型、VLM视觉语言模型的全新自动驾驶技术架构。
当时看了发布会,我觉得理想的这套自动驾驶技术架构非常有产品理念。它存在有快慢两个系统,核心思路是用一颗OrinX芯片用于端到端,也就是快系统。一颗OrinX芯片用于VLM,也就是慢系统。快系统处理常见的场景,而VLM则是处理复杂场景。
当时我就觉得这套智能驾驶技术架构上限极高,以后很有可能在一众自动驾驶架构中脱颖而出。
为什么当时会这么想呢?原因之一是这套架构理念新颖。端到端负责处理日常驾驶,VLM视觉语言模型负责理解复杂路况、导航地图和交通规则等等等等…一个负责常规处理,一个负责学习和测试,两个系统互相独立又互相关联,解藕完全但又需要互相通信,既高效上限又高,相辅相成。
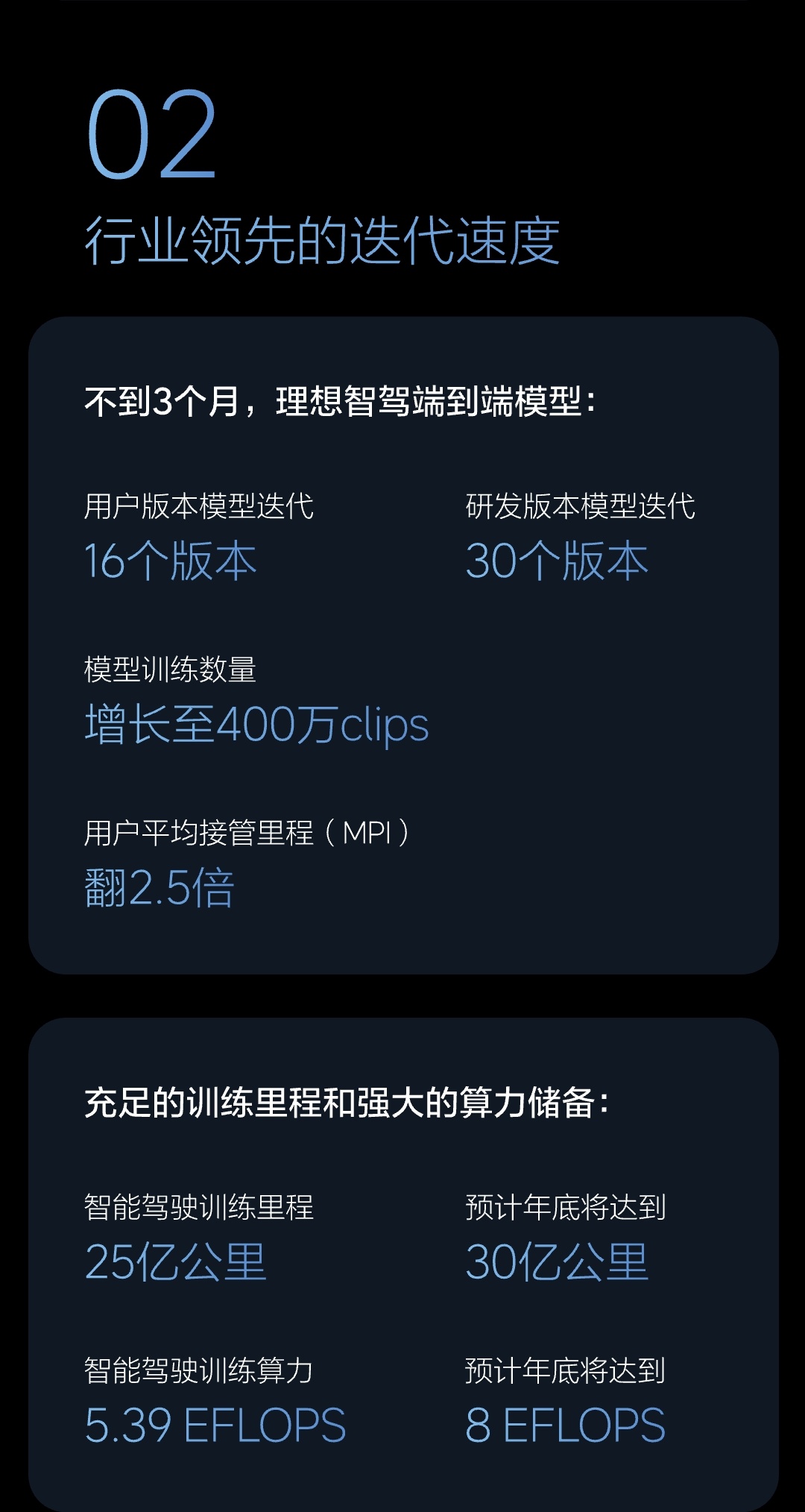
那么怎么达到上限呢?这又需要谈一下智驾另一个重要的点,数据。数据哪里来呢?一定是用户日常的驾驶习惯、驾驶路程…数据关系着模型分析的准确度。那么怎么看哪家数据精准呢?销量决定一切。理想汽车的销量不用我多讲,销量和数据一定是正比。
这次OTA 6.4版本全量更新,或许正是对这套智驾方案的验证,也是理想对自己在智驾领域T0级别定位的一次展示。#理想端到端智驾全量推送##理想L9#