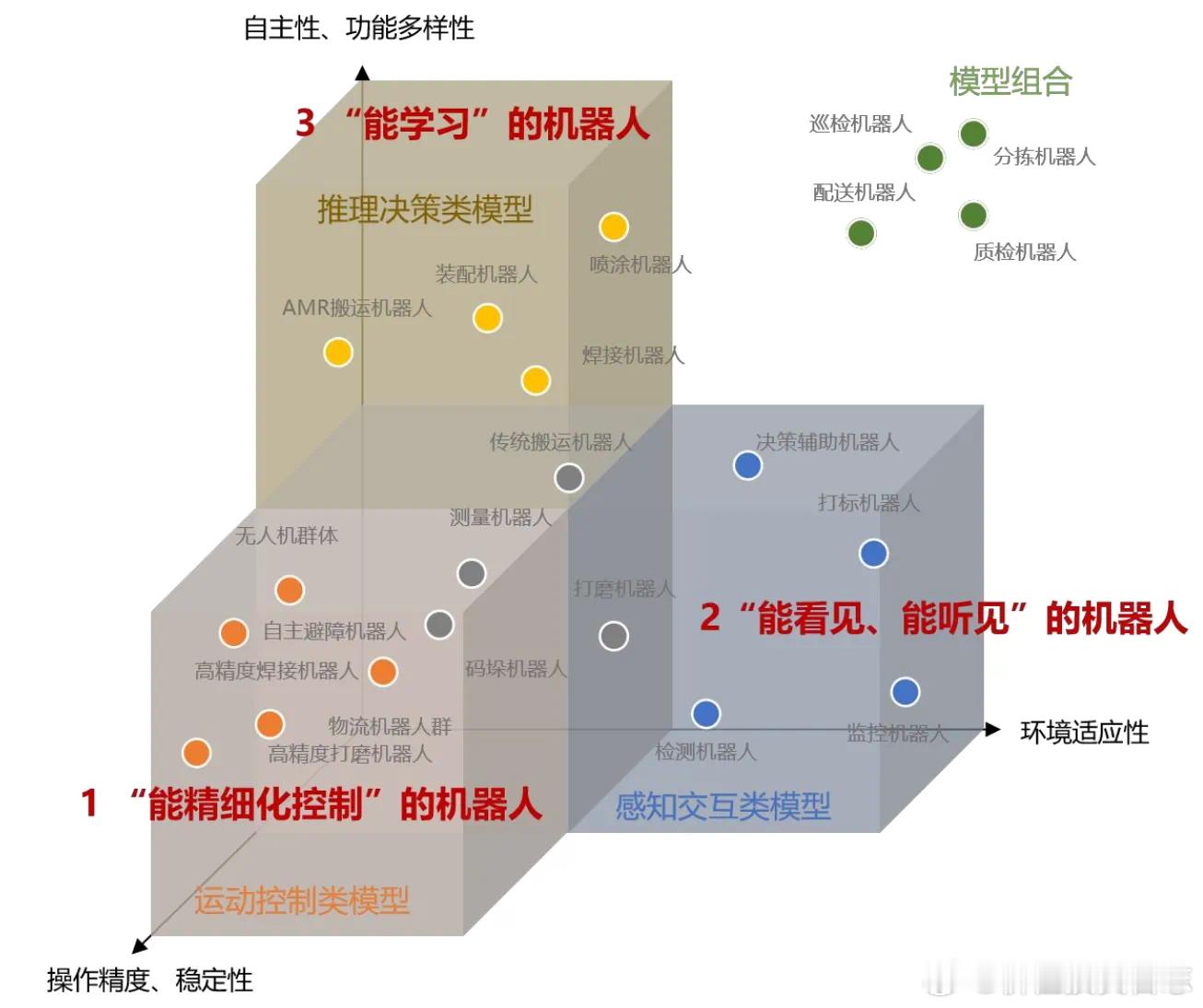
价值投资日志[超话] 感知交互类模型使得机器人“能看见”或“能听见”从而实现与 操作对象或人类的互动。一是识别类,搭载机器视觉技术的机器人取 代人眼对产品进行识别和检测,机器视觉系统能够识别产品的形状、 颜色、二维码、字符等,可以取代人眼对产品进行外观、尺寸、材质 等方面的检测并进行分类和原料追溯,由此发展出检测机器人、打标 机器人等。二是语音类,搭载行业知识库甚至大语言模型的机器人能 够按照人类的指示完成任务,成为快速部署机器人、决策辅助机器人。推理决策模型使得机器人“能学习”提高自主性和适应性。一是 操作学习类,通过学习数据、并在虚拟环境中开展训练,机器人可以实现传统机器人无法实现的焊接、喷涂和装配等操作,如喷涂机器人 通过学习大量的喷涂数据和工件表面特征,实现对复杂工件的精准轨 迹规划;焊接机器人能够根据焊接过程中遇到的不同情况进行自我调 整,以达到最佳的焊接效果;装配机器人利用强化学习算法,在装配 过程中自主学习轴孔装配技能,通过在线辨识控制器的最优参数,提 高装配操作质量。二是自主导航类,随着激光地图建模技术不断成熟, 基于地图开展移动路径设计的自主导航功能也实现广泛应用,发展出 各类清洁、搬运机器人。在传统模块化机器人中,多种模型的组合配合也大大拓展了机器 人的应用场景。其中,以工业视觉为代表的感知交互技术在软硬件层 面都趋于成熟,因此与其他模型的组合使用较为常见,如搭载“识别 类+复杂操作类”模型的分拣机器人、质检机器人;搭载“识别类+ 自主导航类”模型的巡检机器人、配送机器人等。