在3D场景理解领域,实例分割一直是一项极具挑战性的任务。传统方法需要耗费大量人力进行点级标注,一个场景平均需要22.3分钟。而新提出的RWSeg算法或将彻底改变这一现状。它仅需为每个物体标注一个点,便能达到与全监督方法相媲美的效果。这种"一物一点"的弱监督标注方式将原本超过20分钟的工作缩短至不到2分钟,而性能损失几乎可以忽略不计。RWSeg是如何实现这一技术突破的?它采用了怎样的算法架构?这些创新将为3D点云分析带来哪些改变?
3D场景理解技术近年来取得了长足进步,但背后隐藏着一个不容忽视的问题:数据标注成本过高。在传统全监督方法中,技术人员需要为点云数据中的每一个点进行标注,指明它属于哪个类别、哪个具体物体实例。这种逐点标注的工作量十分庞大。
以广泛使用的ScanNet-v2数据集为例,一个典型的室内3D场景包含数十万甚至上百万个点,覆盖墙壁、地板、家具等多种物体。根据数据集创建者的统计,一个场景的完整标注平均需要22.3分钟。对于包含1513个场景的整个数据集,这意味着需要投入超过560小时的专业人工标注时间。
"这种标注方式在大规模应用中几乎不可行,"一位从事3D点云分析的研究者表示,"不仅耗时长,对标注人员的专业技能要求也很高,成本居高不下。"
面对这一困境,研究者们开始探索各种弱监督方法,试图用更少的标注信息获得接近全监督的效果。一些方法采用场景级标注,只标明场景中存在哪些类别;一些方法使用子云级标注,将点云分割成小块后为每块指定类别;还有方法借助2D图像标注或3D边界框标注来辅助训练。
这些弱监督方法在减轻标注负担方面取得了一定进展,但仍存在明显局限。场景级标注虽然简单,但提供的信息太少,难以支持高质量的实例分割;边界框标注虽然信息较丰富,但本身也需要耗费不少时间;2D图像标注则面临从2D到3D的投影误差问题。
在这样的背景下,一种名为"一物一点"的标注策略开始受到关注。这种方法的核心思想是:对于每个需要识别的物体实例,只需标注其上的一个点。这种策略极大地简化了标注过程,将一个场景的标注时间从22.3分钟降低到不到2分钟。
"一物一点"标注策略虽然大幅降低了标注成本,但也带来了新的挑战。首先,信息极度稀疏,每个物体只有一个点被标注,这些标注点占整个点云的比例不到0.02%;其次,由于物体形状和大小各异,单点难以代表整个物体的几何特征;此外,相邻物体之间的边界识别也变得更加困难。
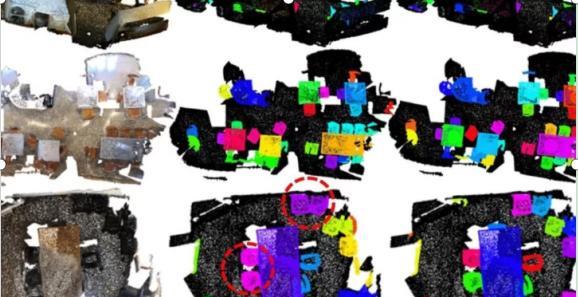
以一个典型的客厅场景为例,其中可能包含沙发、茶几、电视柜等多个物体,这些物体之间往往相邻或甚至部分重叠。在全监督方法中,每个点都有明确的类别和实例标签,分割边界清晰;而在"一物一点"的标注下,算法需要从极少量的已知点推断出整个物体的范围,这是一个典型的从稀疏到密集的推理问题。