英文题目: Multimodal motion emergence in piezoelectric robot system with reconfigurable driving beam unit: Driving mechanism and design
中文题目: 基于可重构驱动梁单元的压电机器人系统多模态运动涌现:驱动机理与设计
作者:Jichun Xing , Zhonglei Dai, Jiawei Zhang, Siying Meng, Ziyi Yang
作者单位: 燕山大学机械工程学院、燕山大学深圳研究院
期刊:Mechanism and Machine Theory(IF 5.2 中科院一区,JCR Q1)
发表时间: 2025年8月26日
链接: https://doi.org/10.1016/j.mechmachtheory.2025.106196
引文格式: Xing J, Dai Z, Zhang J, Meng S, Yang Z. Multimodal motion emergence in piezoelectric robot system with reconfigurable driving beam unit: Driving mechanism and design[J]. Mechanism and Machine Theory, 2025, 215: 106196.
01 全文速览
这篇论文讨论的,不是传统意义上那种靠电机、轮子或复杂关节驱动的小机器人,而是一类压电驱动、模块可重构、能够涌现多种运动模式的微型机器人系统。作者的核心思路很清楚:先把一个能前后运动的驱动梁做好,再把多个驱动梁按三角形、四边形、六边形等方式拼成模块,最后通过不同拓扑组合,让系统实现直线、转向、旋转,甚至阵列协同运动。
这篇工作的亮点,不只是做出一个能跑的小装置,而是把驱动机理、模态选择、足端布局、模块策略和实验性能连成了一条完整链条。文章证明:通过双频正弦激励,驱动梁可以在不同模态下实现前进与后退;而多个驱动梁协同后,机器人模块便能“拼”出更丰富的平面运动能力。
02 研究内容
🧩 2.1 灵感不是来自传统机器人,而是来自磁力拼接玩具
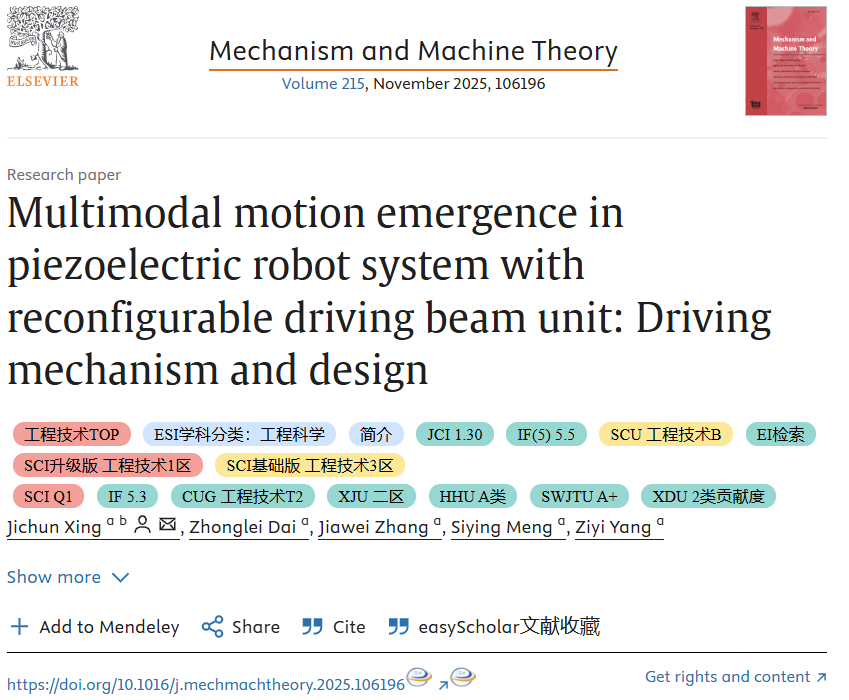
这篇论文一个很有意思的地方,是设计源头并不复杂。作者从多边形磁力玩具得到启发:既然磁吸结构能快速拼成不同拓扑,那压电机器人是不是也能用类似思路,把驱动单元做成模块,再通过连接方式变化扩展运动能力?于是,文章提出了以压电双足驱动梁为核心、以多边形底座为支撑的模块化方案。单个驱动梁负责基础运动,多个驱动梁拼成模块,多个模块还可以继续拼成环形阵列、矩阵阵列和线性阵列。这个设计方向,本质上是在给压电微型机器人补上“可重构”这一块短板。
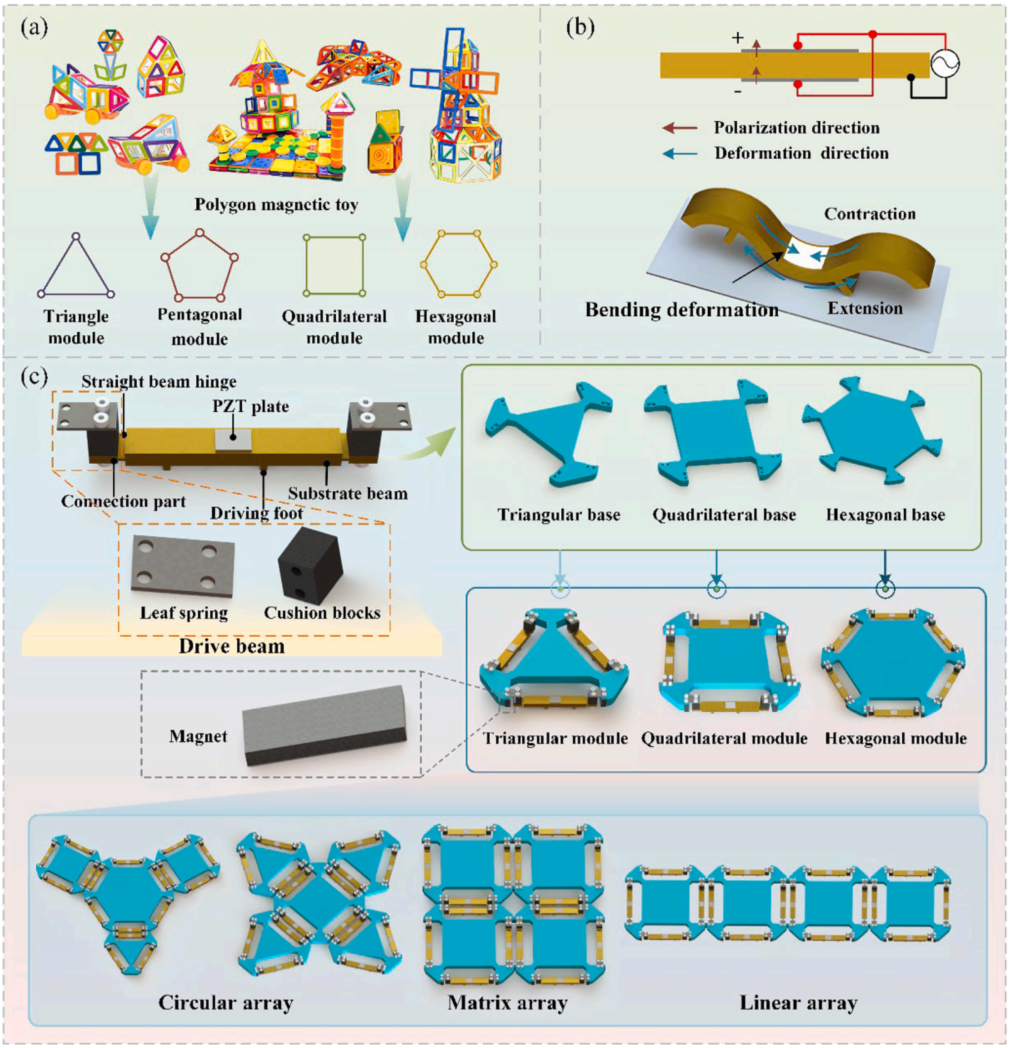
图1:设计概念的由来和模块结构配置。设计灵感的来源;(b)远光灯的接线和变形;(c)驱动模块配置和扩展。
⚙️ 2.2 真正的核心,不在模块外形,而在驱动梁怎么“前后跑”
机器人能动,关键在驱动梁。作者设计的是一种带前后双足的压电驱动梁,通过不同共振模态实现前进和后退。文章的机理分析很有代表性:前进模式对应交替足作用,后退模式对应同步足作用。驱动足与支撑面的摩擦差,决定了净推进方向。文中给出了驱动足在梁弯曲上升与下降阶段的摩擦表达式:
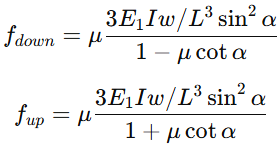
由此可得
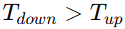
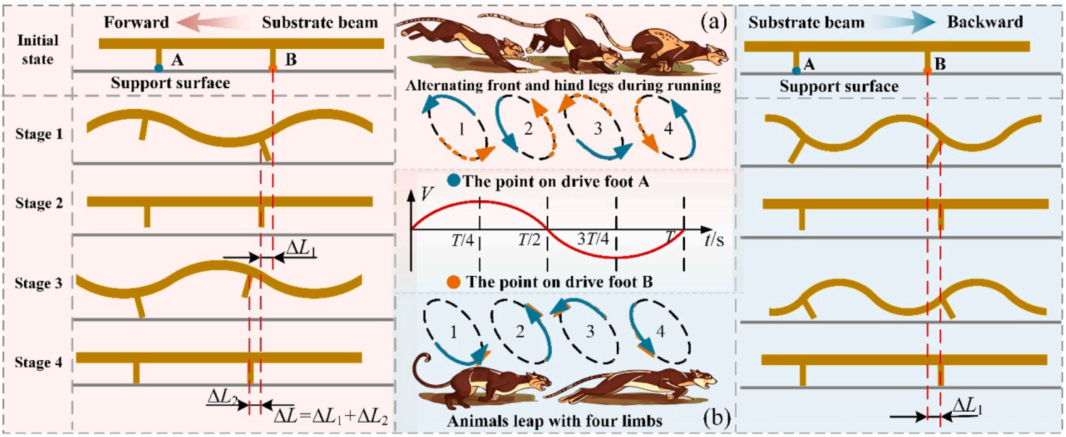
图2:工作原理示意图。向前运动;(b)向后运动。
📐 2.3 论文最硬核的部分,是先算清楚哪几个模态能用
驱动梁不是随便激励都能跑。论文先建立连续体动力学模型,再做模态分析,最后用有限元验证。核心自由振动方程写成:

分离变量后得到模态函数方程:
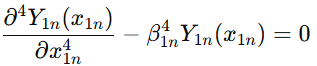
理论分析与有限元结果表明,前六阶模态中,第4阶模态适合前进,第6阶模态适合后退。后续实验进一步验证,实际最佳工作频率分别为21.25 kHz和39.75 kHz。
这里最值得控制和机构方向读者注意的一点是:这篇论文不是“先做样机再调频率”,而是先从模态设计入手,再反过来决定驱动足和压电片布局。这个逻辑是很扎实的。
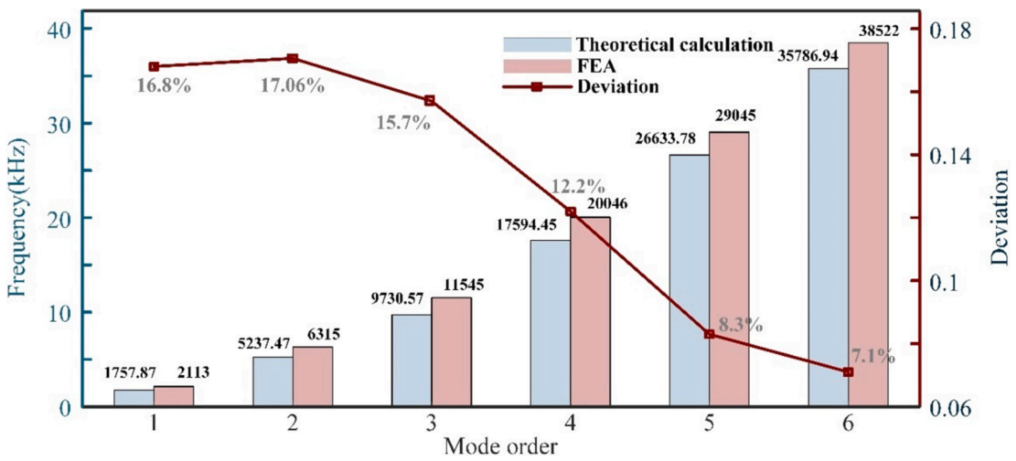
图3:理论计算和有限元分析的固有频率和偏差+压电驱动梁的模态函数。
🦶 2.4 不是足放上去就行,驱动足位置是专门算出来的
为了同时实现双向运动,驱动足位置必须落在第4模态与第6模态允许区间的重叠区域。论文给出了布局范围分析,并最终把两个驱动足沿梁轴方向分别选在8.5 mm和−19 mm附近。仿真显示,加上驱动足后,前六阶固有频率变化都不超过 2.5%,说明这种布局不会显著破坏原有振动特性。
这一点很关键。因为很多微振动驱动结构的问题,不在于能不能振,而在于一旦把足端、连接件、负载真正装上去,原先设计好的模态就被改坏了。这篇论文在这里处理得比较细。
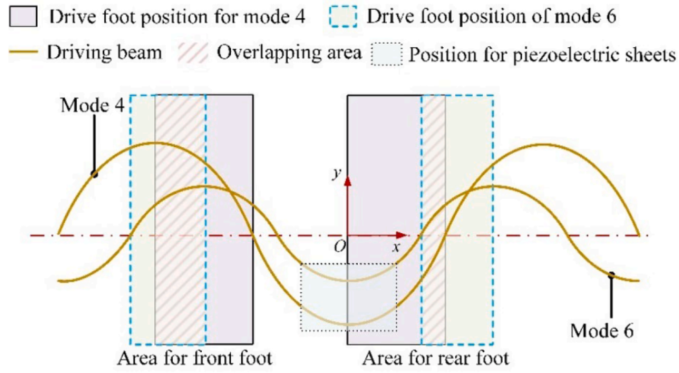
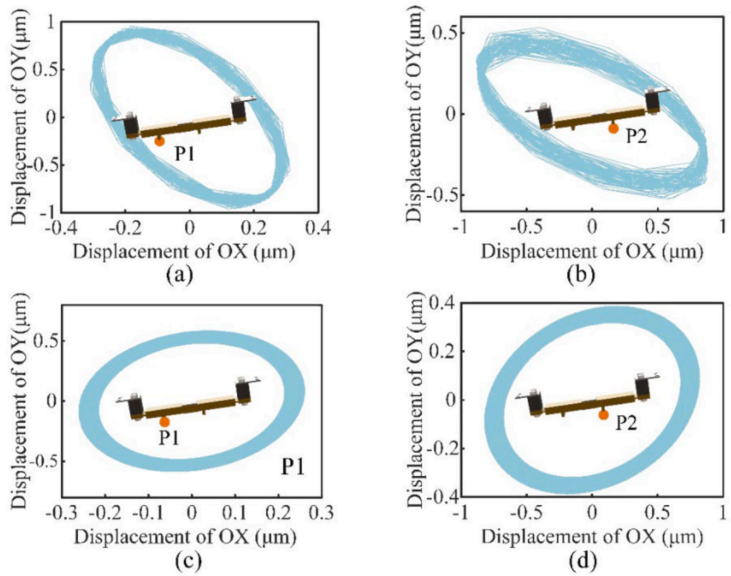
图4:驱动脚位布局范围分析+驱动脚接触点的瞬态分析。
🔄 2.5 从单梁到模块,才真正出现“多模态运动”
单个驱动梁只能前后走,但一旦拼成三角形或四边形模块,事情就不一样了。论文给出了完整的驱动策略表:不同梁分别激发 B4 或 B6,即可让模块实现多方向直线运动、转向和旋转。其中,四边形模块的运动最完整,也是后续实验重点。
这部分最吸引人的地方,是一种典型的“从局部简单动作涌现整体复杂行为”的机器人味道:单梁只会两个方向,多个梁组合后却能拼出平面多自由度机动。
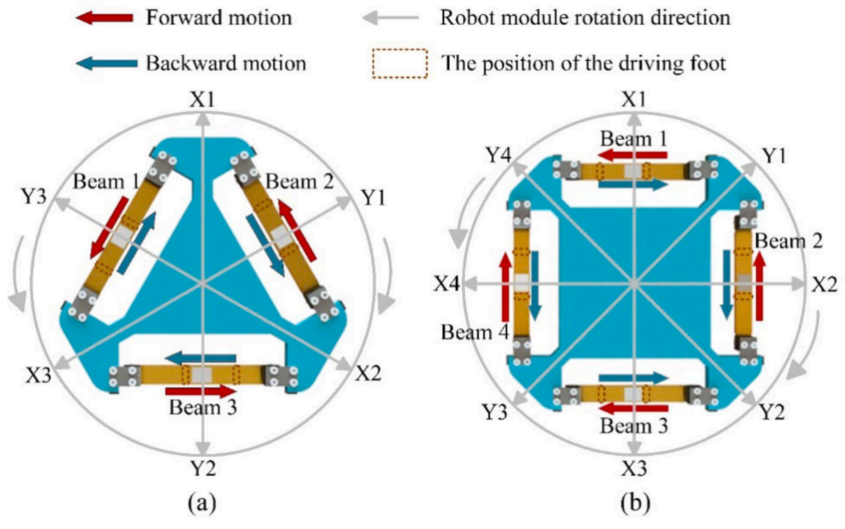
图5:机器人模块运动规划图。
03 创新点
🌟 3.1 把压电驱动从单体器件,推进到了可重构机器人模块
传统压电微型机器人往往更像“一个器件,一个动作”。这篇论文更进一步,把驱动梁做成基础单元,再通过模块和阵列重构,把运动能力系统化扩展出来。这不是简单做快一点、做小一点,而是在改压电机器人系统设计的方法论。
🌟 3.2 前后运动不是靠两套执行器,而是靠两个模态切换
论文证明,用同一根驱动梁,只需切换工作模态和激励频率,就能实现前进与后退。这个设计让结构保持简洁,但运动能力明显增强。
🌟 3.3 性能不算极端快,但综合能力很亮眼
实验结果显示,四边形模块在最优条件下最大前进速度44.1 mm/s,后退速度49.6 mm/s;最大载荷可到800 g;在 200 g 额外负载下,线速度、转向和旋转性能都达到较高水平;在玻璃面上速度最高,在纸面上最慢。进一步回归分析表明,表面粗糙度对速度影响最显著,硬度次之,摩擦系数反而不显著。这个结论挺有意思,也挺反直觉。
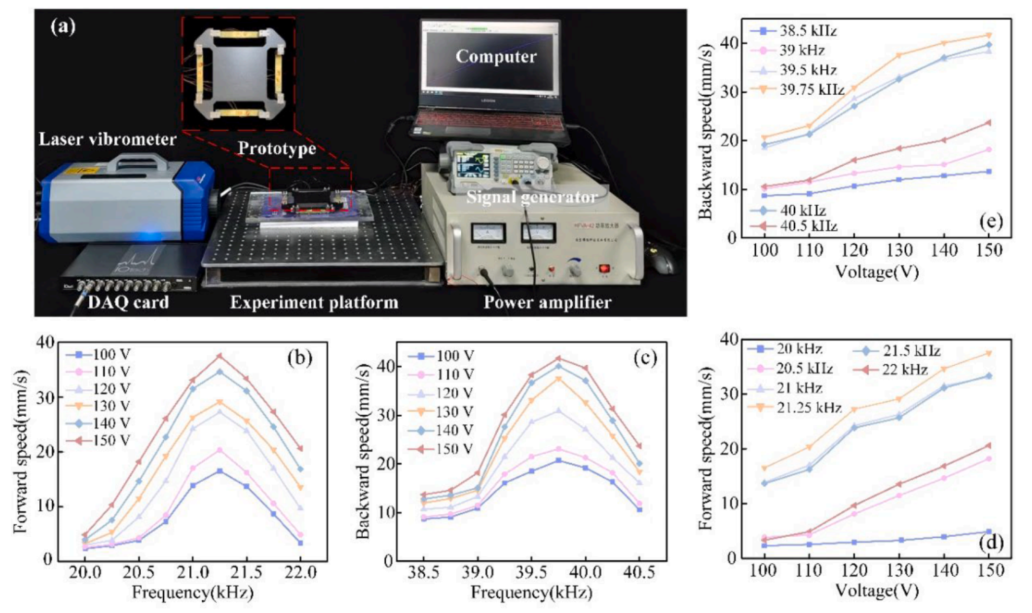
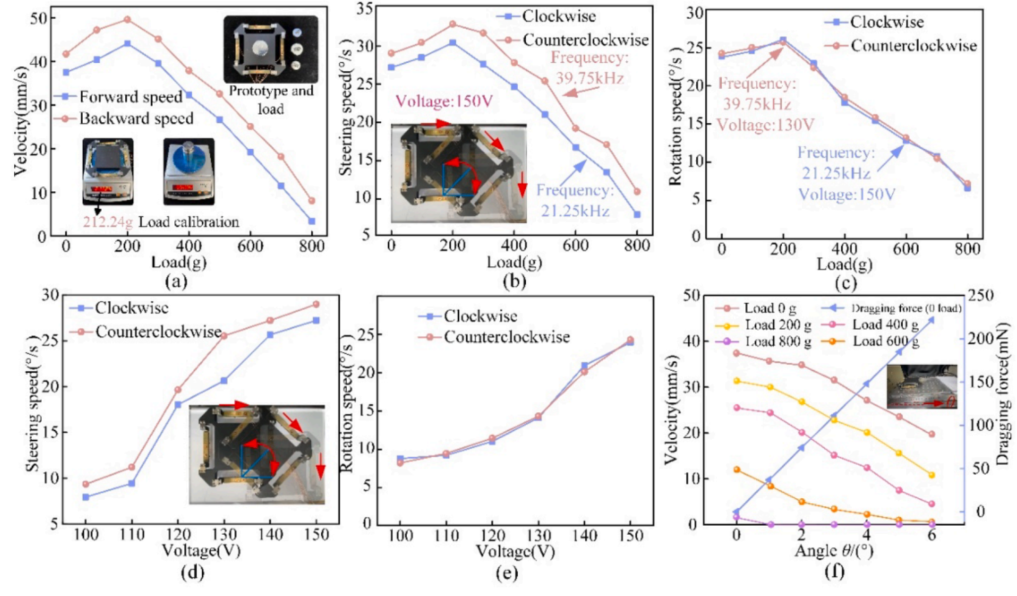
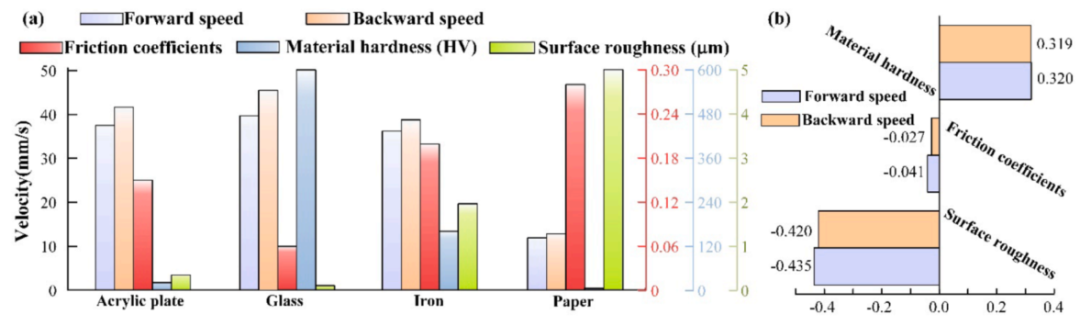
图6:原型速度输出特性+原型负载、转向、旋转和爬坡输出特性测试+四边形机器人模块在不同表面上的移动速度。
04 总结与展望
这篇论文最有意思的地方,在于它不是单纯做了一个能动的小机器人,而是给出了一条比较完整的路线:
先做对模态,再做对足端,再做对模块,最后让多模态运动自然涌现。
文章最后还做了两个很有画面感的展示:一是四边形模块在 U 形轨道 内连续完成直行与转向;二是把模块放到显微镜辅助平台下,带着电路板做微尺度操作演示。这说明作者已经不满足于“证明它能跑”,而是在往微操作、芯片封装、细胞操控这类更贴近应用的方向试探。
当然,问题也很明确。模块一多,控制复杂度就上去了;不同驱动梁之间的频率差、制造误差和装配误差,也会影响协同一致性。作者也明确提到,后续将继续做多通道驱动、误差建模和闭环控制。
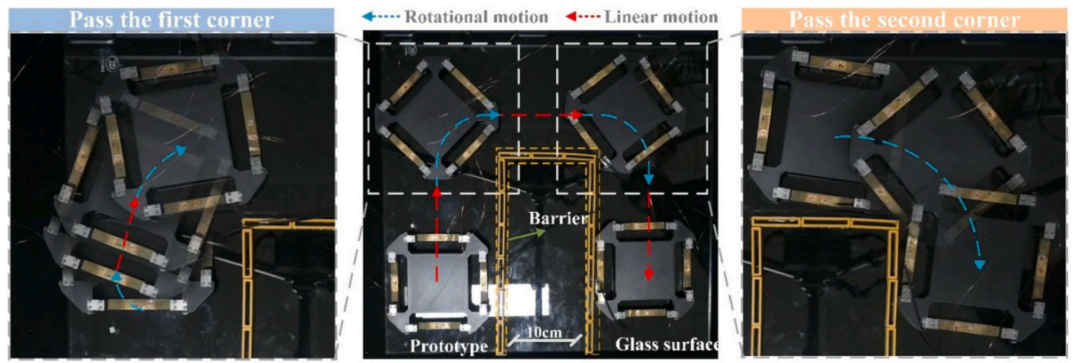
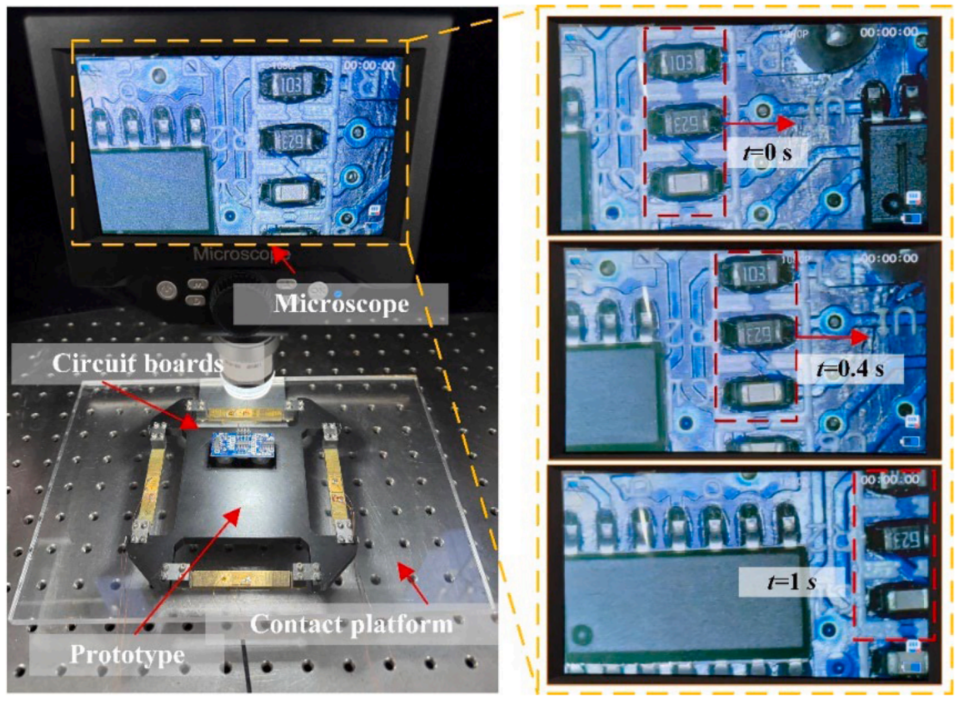
图7:演示四边形机器人模块在U形轨道上移动+可重构模块在显微镜系统中的应用。
未来研究将聚焦于以下几个方向:
🔭 多模块协同控制
从单个四边形模块走向多模块阵列协同,真正把“可重构”变成系统能力。
🛠️ 多通道驱动与闭环补偿
解决多梁频率漂移、输出不一致和同步驱动难题。
🧪 微操作场景落地
围绕显微镜辅助平台,进一步探索芯片封装、细胞操控等精密应用。
这类模块化压电微型机器人下一步最难突破的瓶颈,会是驱动一致性、多模块协同控制,还是真正走向微操作应用?欢迎在留言区聊聊你的判断。
声明:本文仅供学术交流,版权归原作者所有。如有错误或侵权,请联系更正或删除,欢迎留言探讨。