英文题目:Formation control and path planning of multi-robot systems via large language models
中文题目:基于大语言模型的多机器人系统编队控制与路径规划
作者:Dong Xue, Xuanjie Zhou, Ming Wang, Fangzhou Liu
作者单位:华东理工大学能源化工过程智能制造教育部重点实验室;哈尔滨工业大学航天学院智能控制与系统研究所
期刊:Science China Information Sciences
发表时间:2025年4月24日
引文格式:Xue D., Zhou X. J., Wang M., and Liu F. Z., “Formation control and path planning of multi-robot systems via large language models,” Science China Information Sciences, vol. 68, no. 5, 150205, 2025.
01 全文速览
多机器人系统的核心难点,往往不只是“每个机器人怎么走”,而是整个队伍如何形成队形、保持队形、绕开障碍,并在通信延迟或个体故障时继续完成任务。传统方法通常依赖预先定义的数学约束和规则,在静态任务中表现不错,但面对动态环境、队形变化和突发故障时,灵活性不足。
这篇论文提出一种 LLM辅助的多机器人编队控制与路径规划框架。它将机器人参数、运动目标、局部环境信息和控制约束转化为文本提示词,由LLM生成下一阶段运动目标,再通过控制器转化为无人机可执行的控制输入。换句话说,LLM在这里不是直接替代底层控制器,而是作为“高层决策大脑”,负责理解任务、选择策略和更新目标。
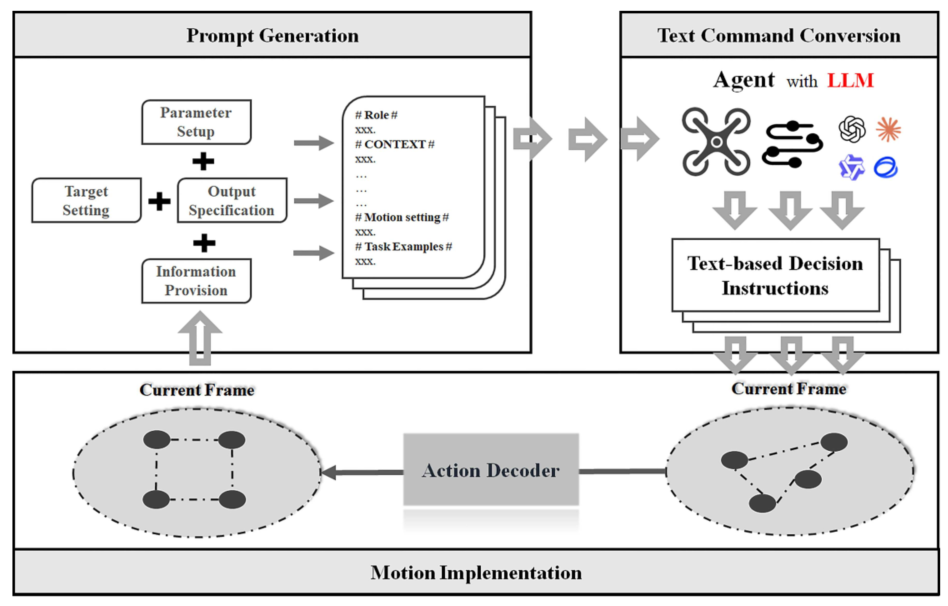
图1:LLM-based control framework,展示提示词生成、文本命令转换和运动执行三大模块。
✅ 亮点1:将LLM引入多机器人编队控制与路径规划,实现文本约束驱动的决策。
✅ 亮点2:提出嵌套循环控制框架,降低LLM调用频率,提高系统执行效率。
✅ 亮点3:针对障碍环境,LLM可根据障碍分布选择绕行或队形调整策略。
✅ 亮点4:考虑通信延迟与个体故障,验证LLM辅助系统的鲁棒性与重组能力。
02 研究内容
🎯 2.1 为什么要让LLM参与多机器人控制?
传统编队控制常依赖leader-follower、虚拟结构、行为法等策略。它们的优势是结构清晰、可分析,但往往需要提前写好规则。比如三角形、方形、菱形、直线队形都可以设计控制律,但如果任务中要求频繁改变队形、根据障碍选择不同策略,就需要大量条件判断和参数调节。
LLM的优势恰好在于理解复杂文本约束。研究者将队形要求、机器人状态、环境信息、避障策略等写入Prompt,让LLM输出下一阶段目标点。这样,复杂数学约束的一部分被转化为更直观的文本描述。


图2:上图展示leader-follower交互结构,下图展示编队距离约束。
🧠 2.2 系统模型:LLM做决策,PID做执行
论文以四旋翼无人机群为对象。每架无人机采用位置—姿态动力学模型,控制输入包括总推力 (f) 和三个方向力矩 ( au_x, au_y, au_z)。编队目标是使机器人之间实际距离逐渐逼近期望距离:
同时,需要满足无人机之间、无人机与障碍物之间的安全距离约束。
LLM输出的是文本形式的目标坐标,不能直接驱动无人机。因此论文采用级联PID控制:外环根据目标坐标生成参考加速度,内环根据姿态误差生成力矩输入。这样形成“LLM高层决策 + 动力学控制器底层执行”的分层结构。
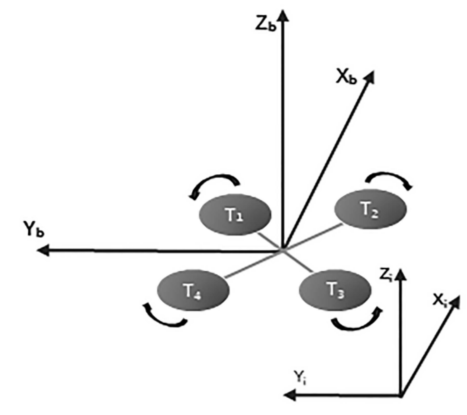

图3:上图展示四旋翼结构,下图展示运动执行流程。
⚙️ 2.3 Prompt生成:把编队控制问题写成“任务说明书”
Prompt由四类信息组成:机器人物理与运动参数、下一阶段运动目标和策略、局部环境与队伍状态、模型输出格式要求。由于形成队形、保持队形、避障、故障处理的需求不同,论文没有使用单一Prompt,而是采用事件驱动的自适应Prompt选择。
例如,当系统处于编队初始化阶段时,Prompt强调“生成指定队形节点”;当检测到障碍物时,Prompt强调“选择绕行或调整队形”;当某架无人机故障脱离时,Prompt要求“剩余无人机重组为新队形”。
这种设计的意义在于:LLM不是盲目输出动作,而是在不同运动阶段被不同任务规则约束。
🚁 2.4 嵌套循环:减少LLM频繁决策带来的开销
LLM调用需要时间和资源,如果每个控制周期都请求LLM,会影响实时性。论文提出嵌套循环控制:外环由LLM生成阶段性目标,内环由无人机按固定控制频率向目标运动。只有当目标完成、检测到障碍或出现故障时,才进入下一轮LLM决策。
这相当于把LLM放在“决策层”,而不是“毫秒级控制层”。这一点非常重要,也更符合当前LLM在机器人控制中的现实定位。
🧭 2.5 避障策略:绕行还是变队形?
论文设计了两类避障实验。第一类是集中障碍,LLM选择整体绕行,优点是队形稳定、内部碰撞风险低;第二类是分散障碍,LLM选择调整队形穿越障碍区域,路径更短,但队形稳定性稍有下降。
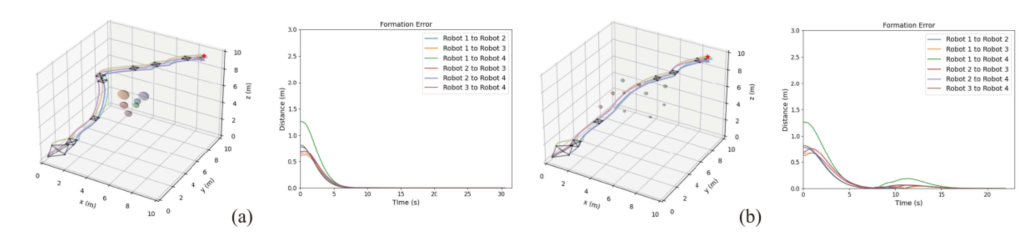
图4:两种避障策略对比。左侧为集中障碍绕行,右侧为分散障碍下调整队形穿越。
实验结果显示,变队形策略的路径长度更短,但安全距离更接近障碍;绕行策略路径更长,但更稳健。这正体现了LLM的潜在价值:它可以根据环境分布和任务需求,在“安全优先”和“效率优先”之间做策略选择。
📡 2.6 通信延迟:LLM还能处理异步控制吗?
多机器人系统中,通信延迟会导致leader先更新目标,而followers滞后执行,进而破坏队形。论文将通信延迟建模为与机器人距离相关的泊松随机变量:

为缓解异步问题,作者提出延迟预测策略:LLM根据延迟逻辑预测followers接收指令的时间,leader不立即更新目标,而是延迟更新,使队伍尽量同步行动。


图5:上图展示延迟预测控制原理,下图展示有无延迟预测下的轨迹与编队误差。
🛠️ 2.7 故障重组:某架无人机掉队怎么办?
论文还模拟了两类故障:一类是集体推进扰动,导致队形短时被破坏;另一类是某架follower严重故障并脱离队伍。实验显示,当个体脱离后,leader可以基于剩余无人机状态重新生成三角队形,使剩余无人机继续向目标点运动。
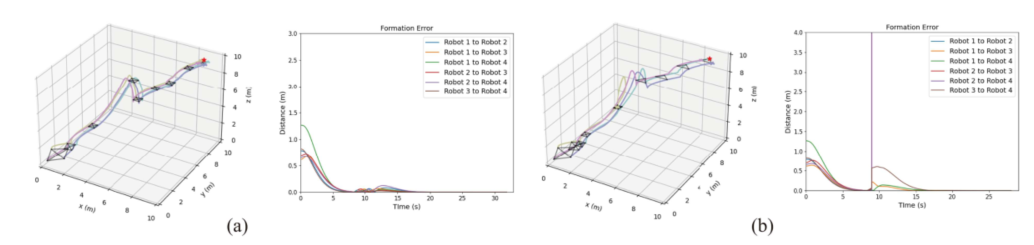
图6:动态输入扰动和个体脱离故障下的队形重组结果。
03 创新点
🔍 3.1 用文本约束替代部分复杂规则设计
论文将队形、避障、故障处理等控制需求转化为Prompt,使复杂控制逻辑更容易调整。
🧩 3.2 构建“LLM决策 + PID执行”的分层控制框架
LLM负责阶段性目标生成,PID负责连续运动控制,避免LLM直接参与高频闭环。
🧭 3.3 支持多队形生成与动态切换
三角形、方形、菱形、直线队形可通过修改Prompt生成,而不必重写底层程序。
🛡️ 3.4 考虑通信延迟和故障重组
论文不仅做了路径规划,还进一步验证了延迟环境和个体故障下的队形恢复能力。
04 总结与展望
这篇论文的价值在于,它将LLM从“自然语言交互工具”推进到多机器人系统的“高层策略生成器”。它并不是让LLM替代控制理论,而是让LLM处理更适合语言表达的部分:任务规则、队形要求、避障策略和故障应对。底层动力学控制仍由传统控制器完成,这种分工是当前较为务实的LLM机器人控制路线。
当然,论文也指出现阶段仍存在不足:主要考虑静态障碍,对动态障碍避让验证不足;LLM存在随机性和幻觉问题;多模态数据融合尚未深入展开。
🔭 未来研究将聚焦于以下几个方向:
1. 面向动态障碍物的实时队形调整与路径规划;
2. 结合视觉、多模态语言模型降低LLM幻觉风险;
3. 引入形式化安全校验,避免LLM输出不可执行目标;
4. 扩展到地面机器人、空地协同和异构多机器人系统;
5. 研究LLM与MPC、强化学习、控制屏障函数的混合控制框架。
声明:本文仅供学术交流,版权归原作者所有。如有错误或侵权,请联系更正或删除,欢迎留言探讨。