海上有人无人分布式协同作战是未来海上方向联合全域作战的重要作战样式之一. 阐述了海上有人无人分布式协同作战概念内涵与面临的主要问题, 总结了国外相关研究现状, 提出了长僚协同式、子母协同式、对等协同式等 3 种作战模式以及一种改进的基于多 agent 的海上有人无人分布式协同体系结构, 构建并分析了海上有人无人分布式协同作战的关键技术体系, 为开展相关研究提供指导支撑.

1) 人机交互技术
它是指在分布式人机系统中,以分布式的方式解决人与机器群体在任务进行过程中的语言、行为等交互问题,促使人与机器之间的决策、行为表达等高效沟通、无障碍。

2) 分布式人机决策技术
它是指在分布式系统中,人、机器等分布式节点首先进行独立自主的决策,然后通过一定规则进行决策的融合或协调,最终整体形成分布式决策的技术。该子技术是分布式人机协同技术的核心内容,通过分布式决策来对各个节点进行分布式的指挥控制,确保个体行为受控和整体功能实现。

3) 分布式管控技术
它是指在人机混合的分布式系统中,通过群体的分布式感知、协同等辅助人类实现更好的环境态势理解和快速决策,从而高效地进行人机混合群体的管理和控制。该技术主要解决面向人机混合群体的高效、快速管控问题。
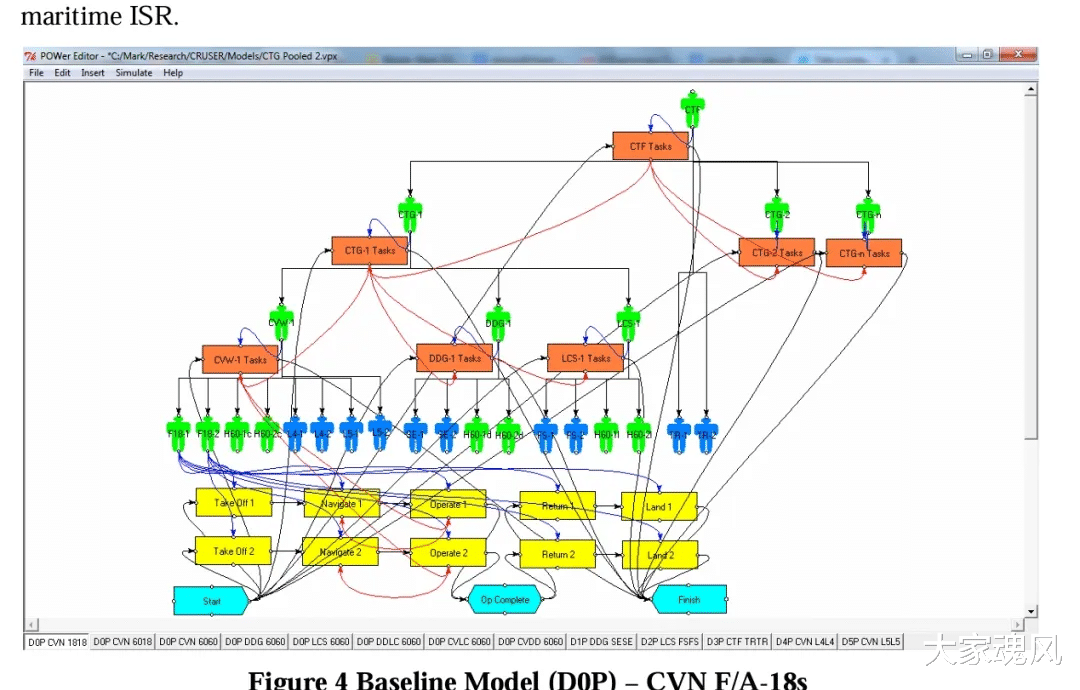
作为分布式海上作战(DMO)的一个关键原则,尽管有人和无人、水面和空中、作战人员和传感器在物理时空上都有分布,但它们需要整合成为一支有凝聚力的网络化兵力。本研究项目旨在了解如何为 DMO 实现有凝聚力的作战人员-传感器集成,并模拟和概述集成实施所需的系统能力和行为类型。作为一个多年期项目,本报告所述的第一项工作重点是建立一个适用于 DMO 建模、模拟和分析的计算环境,尤其侧重于有人和无人飞机的情报、监视和侦察 (ISR) 任务。

弹性灵活的网络及通信技术能够增强通信系统功能,提高其抗干扰性、低被发现率和动态环境适应性。
1) 网络安全技术
马赛克战基本作战单元之间的通信网络通过数据加密、权限管理、通信协议加密等安全措施,保证马赛克战拼图安全自主,不受外部信号干扰、介入和操控。

2) 灵活、开放、自适应的网络拓扑设计技术
由于马赛克战基本作战单元进行组网和解散均是自由灵活的,因此开放、共用的网络架构,可拓展、自适应的网络拓扑,能够保障马赛克战拼图整体功能的灵活快速切换、可持续运行。
3) 弹性网络设计技术
该技术主要应对复杂对抗环境下的动态任务分配和网络攻击任务,提高马赛克战网络及通信的自适应任务优化组网能力、抗摧毁能力、被毁伤后的可恢复能力等。

在半个世纪的建模和仿真研究与实践(例如,见 Forrester, 1961; Law & Kelton, 1991),特别是四分之一世纪的组织建模和仿真工作(例如,见 Carley & Prietula, 1994)的基础上,获得了代表当前技术水平的计算建模和仿真技术(即 VDT [虚拟设计团队];见 Levitt 等人, 1999)。这种技术利用了人们熟知的组织微观理论和通过基于代理的互动而产生的行为(例如,见 Jin & Levitt, 1996)
当“虎鲸”超大型无人潜航器穿出海面时,收到舰队指挥官通过卫星转发的任务指令——“摧毁目标Alpha,使主力部队能够突破敌方防御”。“虎鲸”潜入水下后,与数十个水下、水面和空中无人系统协同行动,机动到其攻击位置。随后从各自的会合点进入,平台使用协调一致的致命和非致命火力,包括电磁干扰和网络攻击,使敌人失明和迷失方向。最终,密集的火力为舰队指挥官提供了一个短暂的窗口,可以使用有人驾驶的飞机、导弹和炸弹突破敌人的反介入/区域拒止 (A2/AD) 防御。完成任务后,无人系统迅速分散,利用其隐身性和速度来避免敌人的反击。

该场景说明了在与势均力敌的对手发生冲突时使用海上无人系统的一个潜在优势——大规模。无人系统可以为舰队和联合特遣部队指挥官在整个竞争过程中进行分布式海上作战时提供不对称优势。为此,美国海军成立了第 59 特遣部队,旨在将无人系统和人工智能与海上作战相结合,特别是在第五舰队的作战区域。
美三军海上战略要求必须实现现代化,利用新兴技术通过进攻行动和防御对抗措施来对抗对手。第59特遣部队已经在开发各类无人系统方面取得了显著进展,但海军还需要一个框架在帮助其在分布式海上作战期间使用这类系统,并在未来三到五年内指导其战略、作战、战术和采办行动。
通过这种技术开发的基于代理的组织模型在大约三十年的时间里也经过了数十次验证,能够忠实地反映对应的真实世界组织的结构、行为和绩效(例如,参见 Levitt, 2004)。此外,几年来,已将同样的计算建模和仿真技术应用到军事领域(例如,见 Nissen, 2007),以研究联合特遣部队、分布式作战、计算机网络行动和其他任务,这些任务反映了日益普遍的联合和联盟努力。
本报告中描述的研究项目旨在利用计算建模来了解如何为 DMO 实现有凝聚力的战斗传感器集成,并建模和概述集成实施所需的系统能力和行为类型。作为一个多年期项目,本报告所述的第一项工作重点是建立一个适用于 DMO 建模、模拟和分析的计算环境。在这第一项工作中,将对当今的海上行动进行建模、模拟和分析,重点是有人驾驶和无人驾驶飞机的情报、监视和侦察(ISR)任务。这为与执行 ISR 任务的一个或多个 DMO 组织进行比较确立了基线。这也为与其他任务(如打击、防空、水面战)进行比较建立了基线。第二阶段接着对一个或多个备用 DMO 组织进行建模、模拟和分析。

有人/无人平台协同作战体系架构如图2所示。水面舰艇、大型飞机、作战飞机等有人平台基于驱动任务分配、临机调整决策的知识管理与知识服务,实现任务组、编队构建的任务分配与临机调整,以及干预无人平台作战行动监控等;无人平台基于面向自身行为控制的知识管理与知识服务,接受有人平台任务信息、控制指令,具备一定的自主控制能力,以及传感器控制、武器控制等其他业务载荷控制能力。有人平台主要向无人平台下发管控权限信息、任务信息和控制指令;无人平台之间共享状态信息,提出控制请求并响应;有人平台之间交互指挥控制任务信息和所需的态势信息。

无人系统在地理位置上广域分散,使用范围超过飞机、舰船和港口的传感器范围,能够提供超视距作战能力。与哨兵式类似,分布式无人系统可以在整个竞争过程中发挥作用,提供态势感知和部队保护。还能提供另外两个好处,首先,可以实现兵力投射,使美海军部队能够通过航行自由行动践行《联合国海洋法公约》。其次,分布式无人系统可以实现威慑,这本质上是一种心理威慑。通过大规模部署,无人系统可以在多个不同的时间和地点快速发动攻击,这种威胁能够使对手陷入两难境地,并可能暴露出更多弱点。这些能力结合起来,可以实现信息优势和全球火力,这是联合作战概念的两个原则。

在冲突期间,分布式无人部队可能会削弱大范围内敌方的能力,使敌方决策者对美军可能在何时何地以及如何发动打击感到更加困惑。事实上,敌方不可能击沉每艘舰船,因此必须等待时机打击其认为是主力舰的舰船。因此,指挥官可以使用分布式模型来欺骗敌方,并实现友军的进攻和防御行动。首先,分布式无人系统可以提供间歇性电磁信号,混淆对手认知,并迫使其暂停行动或重新分配资源。当敌方弄清楚哪个目标是舰船,哪个是廉价无人系统时,分布式无人系统可以对单个关键弱点进行大规模进攻。其次,分布式无人系统可以进行伪随机脉冲作战,扰乱对方传感器,为友军补给行动创造时间。

在本技术报告的其余部分,首先概述了 POWer 计算实验环境,并列举了一个实例,以帮助界定 DMO 组织和现象的计算建模。依次总结了研究方法。最后,总结了沿着这些方向继续开展研究的议程。这些成果将极大地提高理解和能力,使能够为 DMO 实现战斗员与传感器的集成,并为集成实施所需的系统能力和行为建模和概述。

在人机协同框架下,海军可以采用“半人马”(有人-无人)或“牛头怪”(无人-有人)的人机协同模式。前者强调人类对机器的控制,适用于需要高度战术灵活性和复杂判断的任务,如力量投射、进攻性战术扫荡等进攻性行动;而后者则强调利用人工智能增强型军事技术,如“边缘人工智能”,用于在机器监督下进行战术决策,适用于自动化程度较高的战术环境,如弹道导弹防御、综合防空导弹防御等。
通过人机协同整合哨兵式、分布式和大规模战略也充分利用了乌克兰战争的一个重要教训:无人战争包括电磁战。因此,必须将电磁保护内置到每个无人系统及其控制器中。传输连接的适应性选项也不能事后才考虑。最后,每个无人系统都必须能够干扰对手的通信并尽可能地调整其特征。利用电磁频谱,这些无人系统可以致盲和迷惑对手,从而成倍增加其作战效用。通过这种方式,无人系统舰队可以成为海军在未来冲突中需要的信息战舰队。
有人/无人协同作战体系研究正在进入第二阶段。在该阶段,有人/无人作战体系需要辅助作战环境中的有人武器系统作战人员(如飞行员)决策,且为无人值守系统提供任务执行层面的自治。在空中战场,有人/无人协同作战模式发展已经进入相对成熟的阶段;在海战场则以多任务飞机、舰载直升机与无人机协同、水面舰艇与无人水面艇为主要搭配方式;在陆战场,作战人员与无人地面载具/无人战车、陆航直升机与无人机的协同作战成为主流模式;水下战场则主要是依靠潜艇与无人潜航器遂行作战任务。
