
英文题目: Experimental observer-based delayed control of wheeled mobile robots
中文题目: 基于观测器的轮式移动机器人实验延迟控制
作者: Jesús Abraham Rodríguez-Arellano,Roger Miranda-Colorado,Raúl Villafuerte-Segura,Luis T. Aguilar
作者单位: 墨西哥国立理工学院、Cinvestav、伊达尔戈自治大学等
期刊:Applied Mathematical Modelling(IF 5.1 中科院一区,JCR Q1)
发表时间: 2025年7月
链接: https://doi.org/10.1016/j.apm.2025.116038
引文格式: Rodríguez-Arellano J A, Miranda-Colorado R, Villafuerte-Segura R, Aguilar L T. Experimental observer-based delayed control of wheeled mobile robots[J]. Applied Mathematical Modelling, 2025, 143: 116038.
01 全文速览
轮式移动机器人最常见的任务之一,就是轨迹跟踪。
问题在于,真实场景里的机器人几乎不可能只面对理想模型:轮胎打滑、侧偏、地面不平、无线测量噪声、执行器扰动,都会把闭环性能一点点拉坏。论文正是从这个问题切入,提出了一种观测器+比例-延迟控制器的组合方案,用于四轮 Ackermann 型轮式移动机器人轨迹跟踪。
这篇文章最值得关注的,不只是用了延迟控制,而是它把整个问题拆成了两步:
先用扰动观测器估计并补偿扰动
再用proportional-retarded controller处理补偿后的二阶误差系统
作者的目标很明确:在存在扰动和测量噪声时,仍让机器人位置与姿态信号渐近收敛到参考轨迹,并且尽量提高收敛速度、减小振荡。
核心亮点
✅ 研究对象不是简化的单轮模型,而是完整的 car-like 运动学模型。
论文明确区分了简化 unicycle 模型和更复杂的 car-like 模型,并以后者作为研究对象。
✅ 延迟不是系统缺陷,而是被主动设计进控制律。
作者认为,适当的人工时延可以减弱噪声在控制环节中的放大效应,并改善闭环收敛特性。
✅ 控制器结构不算花哨,但层次很清楚。
先做输出变换,把原系统化成两个受扰二阶子系统;再做扰动观测;最后设计比例-延迟控制器。
✅ 实验做得比较扎实。
论文不只给出理论,还在缩比车辆平台上与多种鲁棒控制方法进行对比,结果显示 OPR 控制器在误差指标上整体更优。
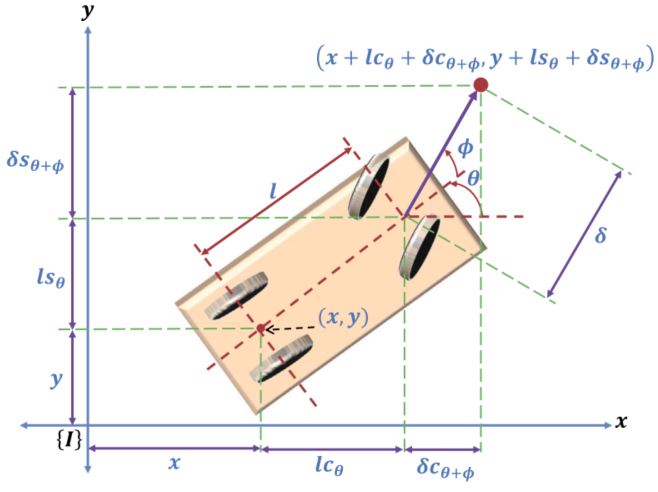
图1:WMR及其相应坐标的总图

02 研究内容
🎯 2.1 先把原问题换一种写法:从整车运动学到两个二阶误差系统
论文从轮式移动机器人的完整运动学模型出发:

其中,

直接在这个模型上做控制并不轻松。为此,作者没有直接对


这里的


这一步很关键。因为论文后面的控制器,本质上就是围绕这两个二阶系统展开的。

图2:应用于WMR的基于观测器的延迟控制器的总图。
🧠 2.2 先观测扰动,再让扰动“衰减掉”
论文的第一步不是直接上控制律,而是先设计扰动观测器。作者借助渐近微分器思想,构造了误差观测系统,并利用估计到的


经过这一步后,原先的二阶受扰系统从

变成了

这里的

这就是论文方法的第一层逻辑:
先把难处理的扰动,变成更容易处理的渐消项。
⏱️ 2.3 延迟控制器不是被动补丁,而是被明确设计出来的
完成扰动补偿后,作者在第二层控制中引入了比例-延迟控制器:

这就是论文标题里 delayed control 的核心。
它不是简单 PID 里加个延迟项,而是一个有明确频域和谱配置依据的比例-延迟结构。
闭环后二阶系统的特征方程变成:

接下来,论文利用spectral abscissa 和

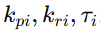

论文进一步在



对应最优衰减率约为 (-1.7)。
图3:表示:(a)定义集合γ𝑖的参数曲线;(b)稳定性-𝐾𝑖地区0;以及(c)具有固定值𝑘𝑝𝑖的平面𝜏𝑖-𝑘𝑟𝑖中的紧集𝐷𝑖。
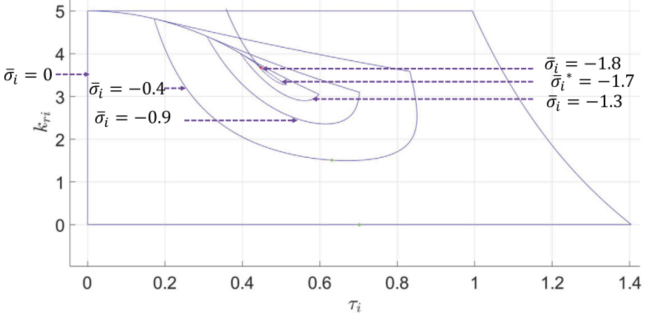
图4:当 𝑘𝑝𝑖 = 5 时 𝑝𝑖(𝒌𝑖, 𝑠) 的 𝜎 稳定区域的图形。
🔧 2.4 方法最终怎么落回真实车辆输入
前面的


至此,控制链条闭合:
原系统建模 → 输出变换 → 二阶解耦 → 扰动观测 → 延迟控制 → 输入重构。
整套方法最终由论文中的 Theorem 1 总结为一个完整控制器。
🧪 2.5 实验结果说明了什么
论文在缩比车辆平台上做了大量实验,并和多种鲁棒控制方法比较。结果显示,提出的 OPR 控制器在 IAE、ITSE、ITAE、RMS 等误差指标上总体表现最好;在控制输入消耗上,HI 方法更低,但 OPR 在误差收敛和综合性能上更突出。
论文特别强调,实验平台本身一直存在扰动,包括:
地面软垫带来的运动学扰动
无线通信测量噪声
多摄像头系统测量误差
尽管如此,OPR 控制器仍表现出较快收敛和较小误差。这也支撑了作者关于鲁棒性的论断。
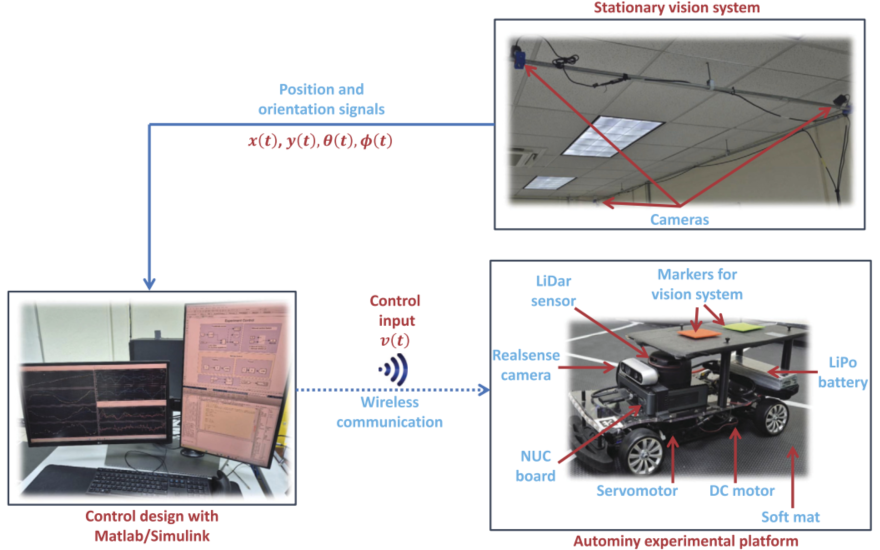
图5:用于轨迹跟踪测试的Autominy实验平台。
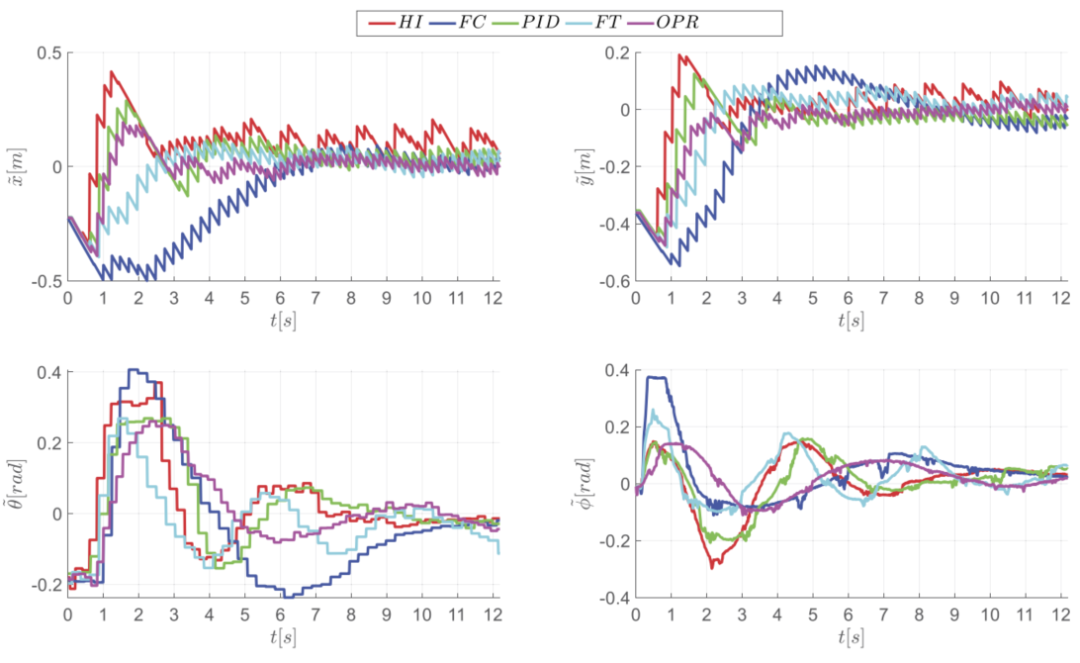
图6:


03 创新点
🌟 3.1 用完整 car-like 模型做轨迹跟踪,而不是停留在简化模型
这篇论文一个很明确的取向,是避开更容易处理的 unicycle 模型,转而面对完整的 Ackermann 型轮式机器人。这个问题本身就更贴近真实车辆控制。
🌟 3.2 把扰动观测和延迟控制串成了一条完整链条
作者不是单独做观测器,也不是单独做延迟控制,而是先用观测器把扰动压成渐消项,再用比例-延迟控制器完成指数收敛设计。这种分层处理让控制器结构比较清晰。
🌟 3.3 用

相比直接经验调参,论文给出了一套更有理论依据的延迟控制参数选择方法,把延迟、比例增益和衰减率联系起来。
🌟 3.4 实验验证比较充分
不仅做了实车实验,而且和已有鲁棒控制方法进行了系统比较,这让论文的贡献不只停留在理论层面。
04 总结与展望
这篇论文的价值,不在于提出一个特别复杂的控制器,而在于它抓住了轮式移动机器人控制里两个非常实际的问题:扰动和噪声。作者给出的答案也比较直接:先观测扰动、再引入人工时延,通过比例-延迟控制把闭环误差压下去,并利用谱特性分析来保证收敛速度。
从实验结果看,这条路线是有效的。它说明在轮式机器人轨迹跟踪问题上,延迟并不一定是性能负担,恰当设计后,反而可以成为改善闭环行为的一部分。
论文也明确给出了当前方法的不足:
其一,观测器需要速度测量;
其二,控制器参数选择还不够系统化;
其三,未来还需要进一步处理不匹配扰动的影响。作者后续计划包括:发展无需速度测量的扰动观测器、建立更系统的增益设计指标,以及修改控制结构以增强对 unmatched disturbances 的抑制能力。
未来研究将聚焦于以下几个方向:
🔭 无速度测量的扰动观测器
降低传感器依赖,提高方法在实际车辆平台上的适用性。
📈 更系统的比例-延迟参数设计
把性能指标直接纳入参数选择,而不是主要依赖稳定区域分析。
🛡️ 对不匹配扰动的进一步抑制
把当前针对匹配型扰动的设计,推广到更复杂的实际干扰情形。
对于轮式移动机器人轨迹跟踪来说,扰动观测精度和延迟控制参数设计,哪个更重要?欢迎在留言区聊聊你的看法。
声明:本文仅供学术交流,版权归原作者所有。如有错误或侵权,请联系更正或删除,欢迎留言探讨。