只有纯视觉的占据网络才叫占据网络。
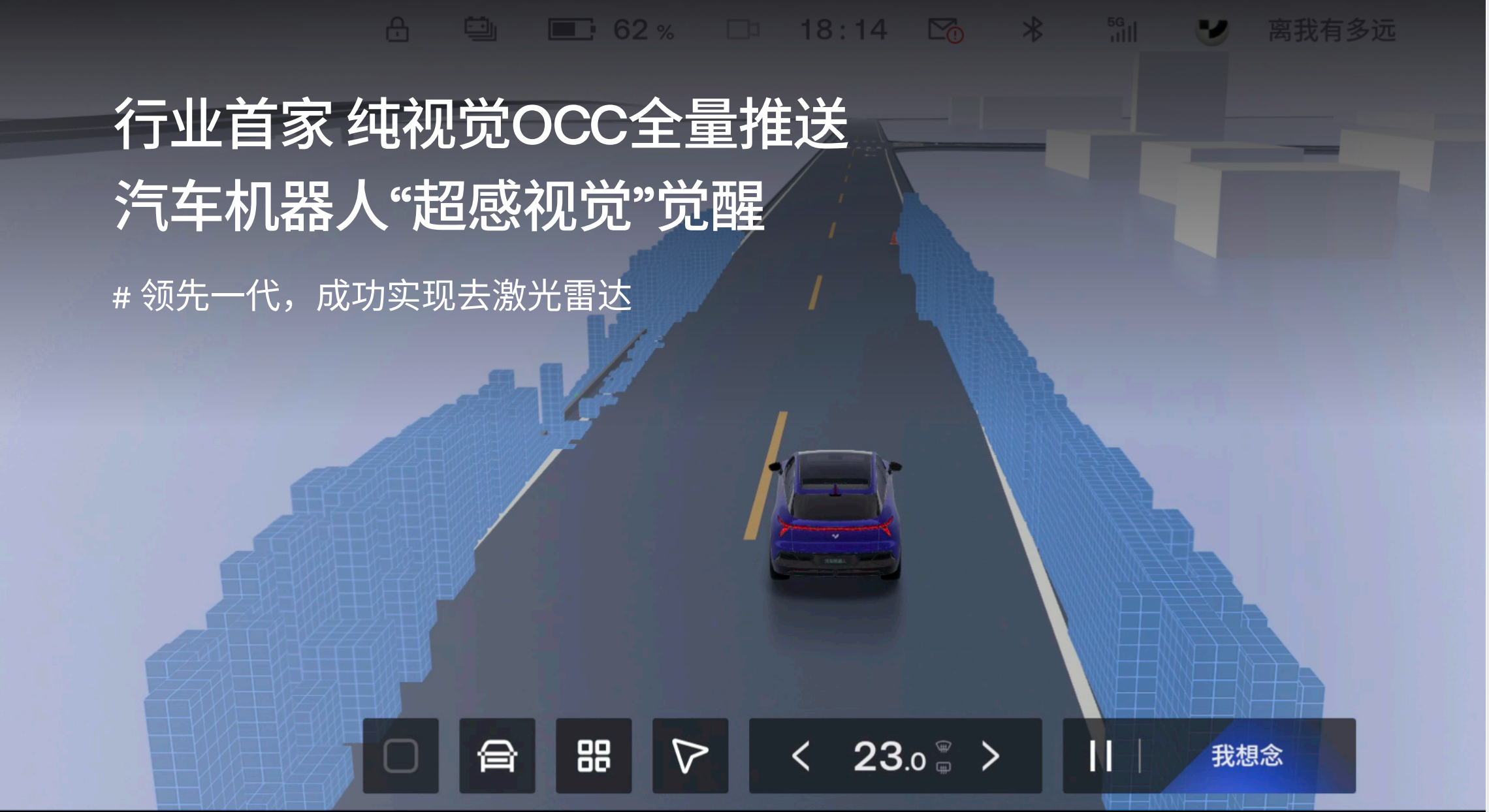
[星星]今天极越发布了中国首个纯视觉Occupancy Network 占用网络(如图一,周围的物体被感知成一个个小方块)。
有不少人评论,不是xx家,xx家也上车了吗?
很有意思的一件事情是,占用网络本身就是特斯拉感知因为遇到了通用障碍物难以处理,已有感知技术栈对周围物体上识别精度不足以满足更加精细的控制,才衍生出的技术。
一些有Lidar硬件配置的厂商,却也早早宣布自己有了占据网格结果,
从硬件天然本身就已经有了点云的信息,想要获得占据网格结果,几乎不用什么力气,甚至不需要使用任何网络,直接对点云结果栅格化就好了,结果是与lidar点云范围完全一致的,一般只有前视
只能叫获得占据栅格结果,实际上并没有一个专用神经网络来完成,难度是相对较小的。
换句话就是,用lidar做的,这有啥好宣传的?
[星星]那纯视觉的Occupancy Network有什么优势?
不仅是前视,环视的所有摄像头都能获得相应的占据结果,并且能够同时提供足够丰富的语义信息,要知道lidar出来的结果由于没有明显的纹理特征,语义识别极为有限。
这就比点云信息有了显著的优势。
[星星]我猜还会有人问,有lidar就不能发展纯视觉occupancy Network吗?
问一个简单的问题,如果一门课是开卷考试,还有人去一个字一个字背书吗?
团队内部也一样,已经有了lidar真值捷径,谁愿意主动绕远?
从这个角度来看,非常佩服极越的勇气。相信AI的力量,主动要求闭卷考试,并且为之努力。
而真正遇到大江大河,闭卷考试的极越也就有了更自信的底气,首个提出智驾保的概念。
像童话里单枪匹马的骑士少年,冲着盘踞的恶龙发出的冲锋。