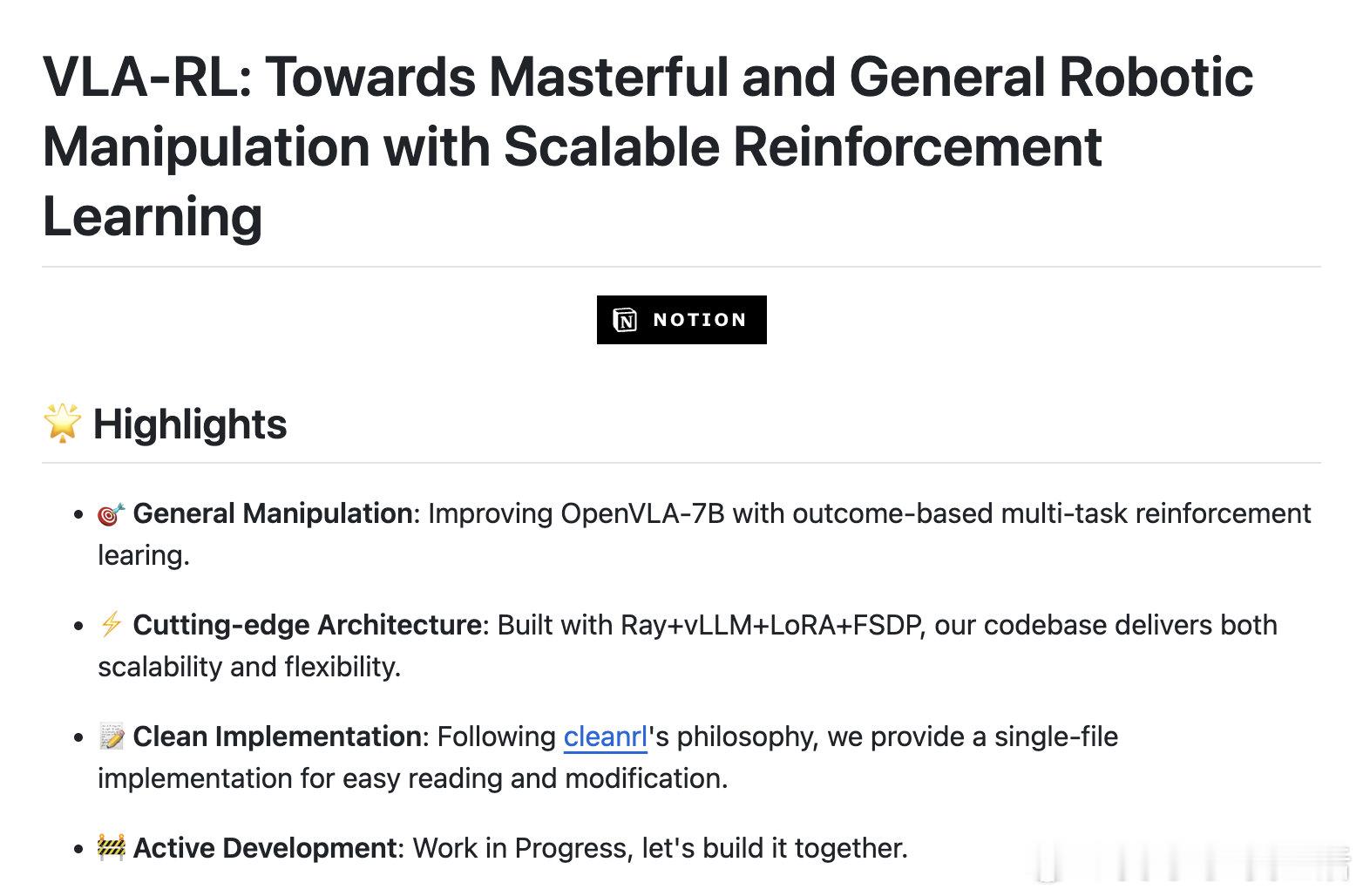
【[21星]VLA-RL:用强化学习推动视觉-语言-动作模型发展的单文件实现。亮点:1. 通过多任务强化学习提升通用操作能力;2. 采用Ray+vLLM+LoRA+FSDP架构,具备卓越的可扩展性和灵活性;3. 遵循cleanrl理念,代码简洁易读,方便修改】
'VLA-RL: Towards Masterful and General Robotic Manipulation with Scalable Reinforcement Learning'
GitHub: github.com/GuanxingLu/vlarl
强化学习 机器人操作 视觉语言动作模型 AI创造营