英文题目:Miniature deep-sea morphable robot with multimodal locomotion
中文题目:具备多模态运动能力的微型深海变形机器人
作者:Fei Pan, Jiaqi Liu, Zonghao Zuo, Xia He, Zhuyin Shao, Junyu Chen, Haoxuan Wang, Qiyi Zhang, Feiyang Yuan, Bohan Chen, Tongtong Jin, Liwen He, Yun Wang, Kangle Zhang, Xilun Ding, Tiefeng Li, Li Wen(通讯)
作者单位:北京航空航天大学、浙江大学、中国科学院深海科学与工程研究所等
期刊:Science Robotics(IF 27.5中科院一区,JCR一区)
发表时间:2025年3月19日
链接:https://doi.org/10.1126/scirobotics.adp7821
引文格式:Pan F, Liu J, Zuo Z, et al. Miniature deep-sea morphable robot with multimodal locomotion[J]. Science Robotics, 2025, 10: eadp7821.
01全文速览深海探索一直是个矛盾的事:想看得细,就得靠得近;但传统的深潜器又大又笨,靠近了容易破坏那些脆弱的生态系统。北航文力团队这些年一直在做一件事——把深海机器人做小、做软、做灵活。
这篇Science Robotics的成果,可以说是他们在这个方向上的一次系统展示。核心是一套基于手性超材料的软体驱动单元,只有16克重,却能扛住马里亚纳海沟1万米深处的压力。用它做的机器人,可以游泳、滑翔、爬行三种模式切换,在海马冷泉(1380米)和马里亚纳海沟(10660米)实际测试成功,最后还被载人潜器的机械臂完好无损地捞了回来。
更妙的是,这个驱动单元有个反直觉的特性:水越深、压越大,它反而跳得更快、扭得更猛——因为高压让软材料的模量增加,弹性势能释放更剧烈。基于同样的手性结构,他们还做了个软体夹爪,能“穿”在现有刚性机械臂上,在3400多米深处抓海参、捞海星、开箱子、搬东西,干了一堆活。
核心亮点:
✅极致轻量:驱动单元仅16克,整机2.7公斤(空气中)
✅万米耐压:马里亚纳海沟10660米实测,完好回收
✅越深越强:利用高压提升材料模量,驱动性能反而提升
✅三模切换:游泳、滑翔、爬行,0.75秒从游变爬
✅能干实活:软体夹爪完成生物采样、物体搬运、开关箱等系列操作
02研究内容🧩核心单元:手性超材料+管封SMA
传统软体驱动器下了深海有两个问题:一是软材料被高压压得动弹不得,二是电机、液压系统体积太大,没法塞进厘米级机器人里。
图1A-D解释了他们的思路。他们设计了一个双稳态手性单元——从一个十字形软材料预压缩得到,有两个稳定状态,分别对应左旋和右旋。在扭矩作用下,这个单元可以快速“啪”地一声从一种稳态翻转到另一种(图1B),产生高速扭转运动。
关键在这里:这个“啪”的速度和材料模量的平方根成正比。深海高压会让软材料的模量增加,理论上说,水越深,这个单元反而跳得越快。图1B的有限元模拟证实了这一点:模量增加15%,最大扭转速度提升8.5%,摆动幅度增加1.68%。图1C显示输出扭矩同样随模量增加而增加。
为了实现周期性摆动,他们把两个形状记忆合金(SMA)弹簧和一对镜像的手性单元组合起来(图1E)。SMA弹簧通电收缩,提供触发扭矩。图1F-G显示,与无手性的对照组相比,这个设计让摆动幅度平均提升了71.6%。更重要的是,在模拟深海环境(4°C,40 MPa)测试中,单元的摆动幅度和速度反而比常温常压下更高(图1I-J),验证了“越深越强”的猜想。
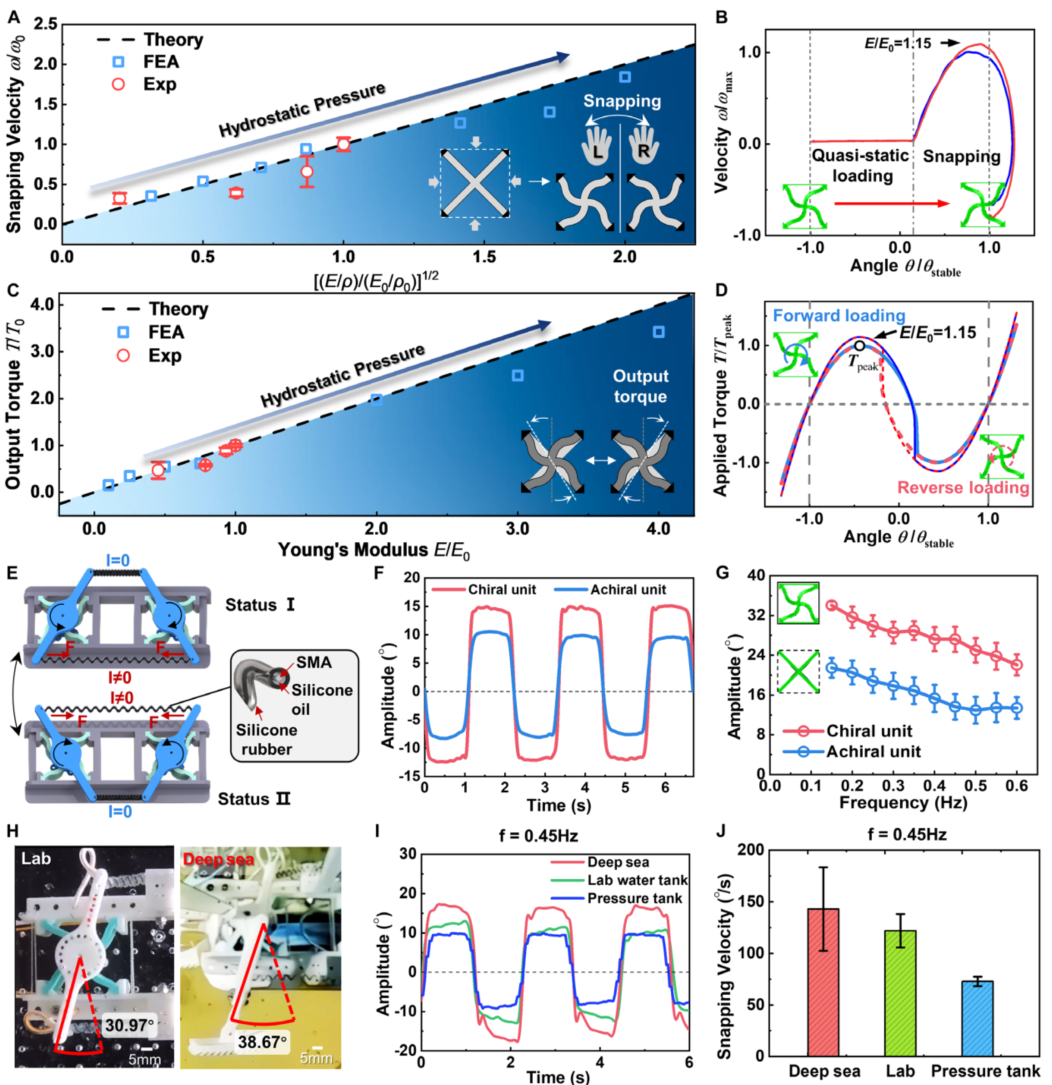
图1.深海手性驱动模块。(A)手性驱动模块的折断速度与杨氏模量(E)和密度(ρ)之间的关系(n = 5;误差线表示SD)。(B)状态切换过程中手性单元的速度。(C)手性驱动模块的输出扭矩与杨氏模量(E)之间的关系(n = 5;误差线表示SD)。(D)在角度控制加载条件下状态切换期间手性单元上施加的扭矩。(E)深海手性驱动模块设计示意图;SMA线圈用硅油密封在硅橡胶管内。(F)手性和非手性驱动模块的摆角随时间变化。(G)实验室水箱中手性和非手性驱动模块的旋转幅度的比较(n = 10;误差线表示SD)。有关手性和非手性比较的更多详细信息可在电影S3中找到。(H)实验室和深海环境中手性单元旋转幅度的比较(有关压力罐测试的更多详细信息请参阅电影S5)。(I和J)手性驱动模块在压力罐(静水压力,40 MPa;温度,30°C)、实验室水箱(静水压力,0 MPa;温度:22°C)和深海环境(深度,3789 m;相应静水压力,37.9 MPa;温度,4°C)中在0.45 Hz驱动频率下的旋转幅度比较(n = 5;误差线表示SD)。
🤖机器人设计:一身三用,变形切换
有了驱动单元,就可以搭积木了。机器人的设计思路挺清晰:用同一套驱动单元,实现三种不同的运动模式。
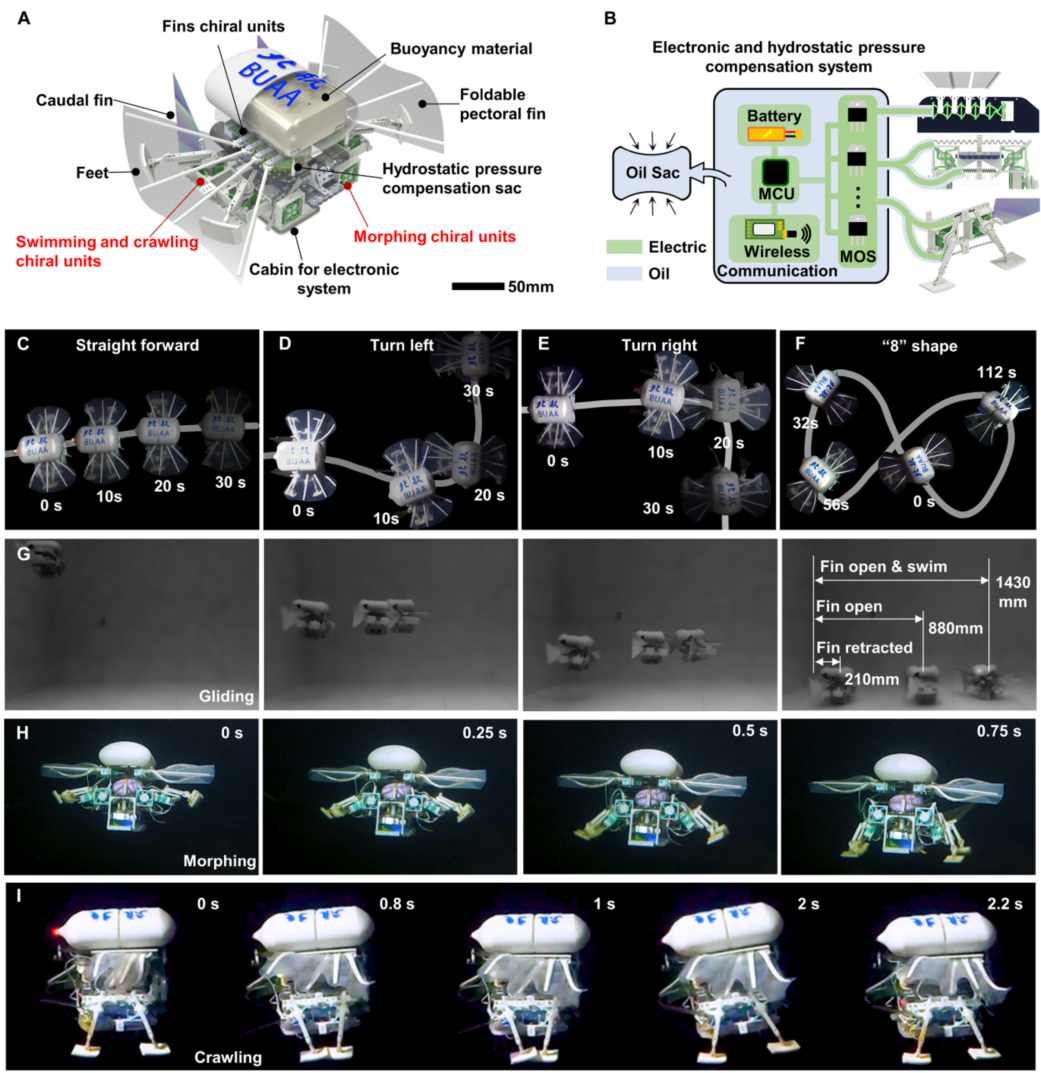
图2A展示了整体结构:两侧的驱动单元控制尾鳍和腿,前部的驱动单元负责变形,胸鳍可以折叠。具体来说:
游泳模式:两侧驱动单元交替触发,让尾鳍左右摆动产生推力(图2C)
转向控制:只触发一侧,就能左右转弯(图2D-E)
滑翔模式:胸鳍展开,利用升力延长滑翔距离(图2G中,展开胸鳍比收起多滑670 mm)
爬行模式:驱动单元让腿同步运动,配合异形脚产生向前的摩擦力(图3I)
变形切换:0.75秒内完成从游到爬的状态转换(图2H)
视频S6和S7
实验室测试(图2C-I)显示,机器人最大游泳速度60.8 mm/s,爬行速度31 mm/s,还能走出8字形轨迹(图2F)。
🌊深海实战:海马冷泉+马里亚纳
实验室数据再漂亮,也得看真章。团队带着机器人上了“深海勇士”号和“奋斗者”号载人潜器,去了三个地方:海马冷泉(1384米)、龙溪海山(3756米)、马里亚纳海沟(10666米)。
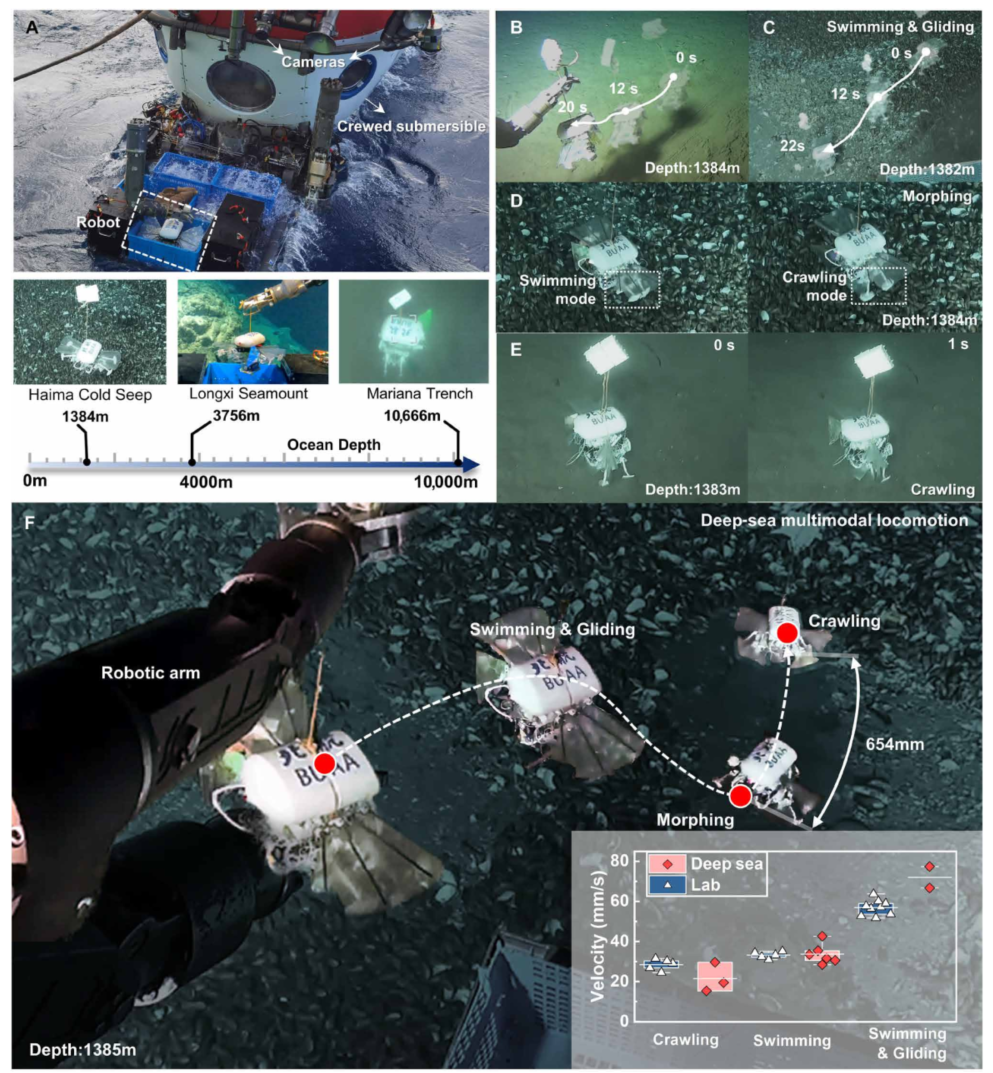
图3.机器人在深海中的多模式运动。(A)深海勇士号载人潜水器运送的机器人在下潜前。(B和C)在深海进行的游泳和滑翔测试。(D)游泳和爬行模式之间的转换。(E)机器人的爬行。(F)在深海部署机器人的实验轨迹;子面板比较了实验室水箱(爬行,n = 5;游泳,n = 5;滑行和游泳,n = 9)和深海(爬行,n = 3;游泳,n = 6;滑行和游泳,n = 2)之间的机器人速度。统计分析表明,机器人的游泳(P = 0.84)和爬行(P = 0.10)速度在实验室水箱和深海之间没有显着差异。
机器人在龙溪海山、海马冷泉和马里亚纳海沟的多模式运动(视频S11至S13)。
图3A是任务概览。在海马冷泉,机器人被放到海底,先是游了671 mm(20秒),然后切换到爬行模式,爬了654 mm(25秒)(图3B-E)。图3F的统计分析显示,机器人在深海和实验室的表现没有显著性差异(游泳P=0.84,爬行P=0.10)。
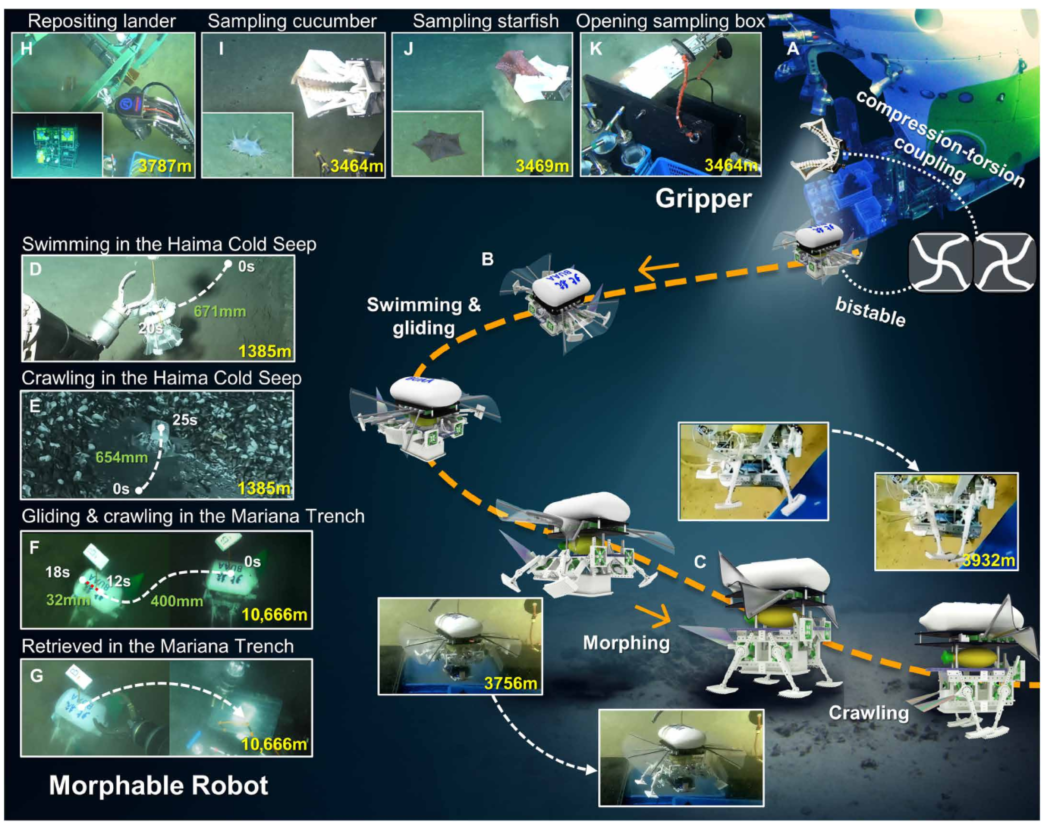
图4.深海多模态软机器人的任务概况,展示了其在深海环境中游泳、滑行、爬行和抓取的能力。(A)小型机器人由奋斗者号载人潜水器部署在10,666 m的深度,展示了不受束缚、可变形和多模式运动。(B)机器人在鳍打开的情况下游泳和滑行。(C)机器人在海底爬行,鳍闭合。(D)机器人在海马冷泉中20秒游动671毫米。(E)机器人在海马冷泉中25秒内爬行654毫米。(F)机器人在马里亚纳海沟中在12秒内游泳并滑行400毫米。小型机器人在马里亚纳海沟中6秒内爬行了32毫米。(G)机器人被奋斗者潜水器的刚性机械臂回收。(H)安装在深海勇士号刚性臂上的软夹具,将重型深海着陆器(沧海号)重新定位在南海3787米深处。(一)软爪在南海3464米处采集海参。(J)软爪在南海3469米处采集深海海星。(K)操纵生物样品收集盒的软夹具。
深海采样(视频S14)。
在马里亚纳海沟10666米深处,机器人游了400 mm(12秒),爬了32 mm(6秒)(图4F),最后被“奋斗者”号的机械臂完好回收(图4G)——这大概是目前有报道的、在万米深海自由移动的最小机器人之一了。
深海实战(图4H-K)中,这个夹爪干了这些事:
-在3787米深处,移动一个重型深海着陆器(图4H)
-在3464米处,抓了一只海参(图4I)
-在3469米处,抓了一只海星(图4J)
-开合生物采样箱(图4K)
🦑软体夹爪:一爪多用,能干细活
除了机器人本体,团队还用同样的手性结构做了个软体夹爪(图5A)。原理是利用手性单元的压扭耦合效应——往下压,它就会转(图5C)。把这个单元装在刚性机械臂上,开合动作就能变成抓取动作。
图5F的拉脱力测试显示,夹爪对不同形状的物体能产生10-50 N的抓力。图5G-H显示,抓取过程中接触应力始终低于33 kPa,物体变形率小于14%,说明这个夹爪确实够“软”,适合抓脆弱生物。
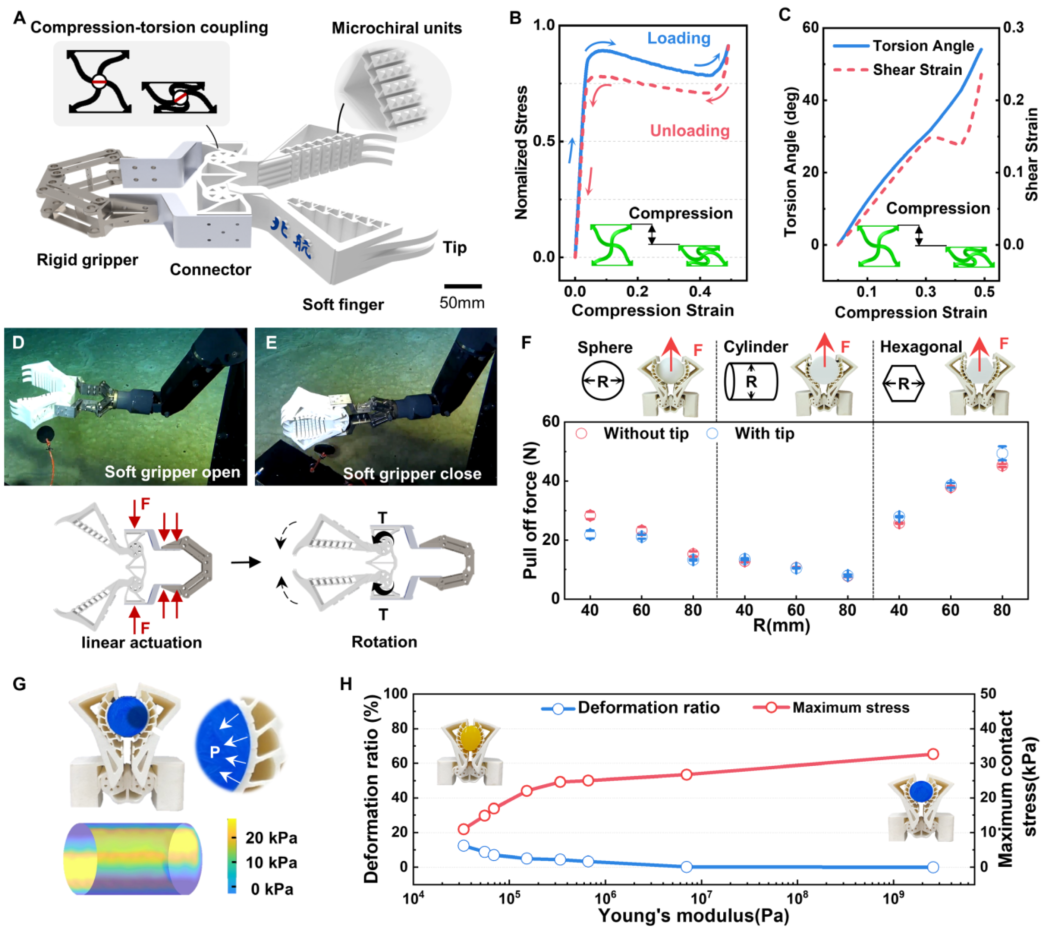
图5.用于精细操作的深海软夹具。(A)夹具的设计示意图。该夹具由两个对称的手性单元和一对抓取手指组成。(B)手性单元的压缩应力-应变曲线。(C)手性单元的压缩-扭转和压缩-剪切耦合效应。(D和E)深海中抓手的爪子张开和闭合。(F)抓取各种形状和尺寸的物体时夹具的最大拉脱力(n = 5;误差线表示SD)。(G)抓取器在抓取圆柱形物体时施加的接触应力。(H)夹持器夹持不同杨氏模量物体时的变形率和最大接触应力。
能软能硬,能抓能搬,还不用额外供电——这个设计思路挺讨巧,等于给现有的刚性机械臂加了一层“软界面”。
03创新点①“越深越强”的反直觉设计
通常软材料下海是被动挨打——高压让它们变硬,动弹不得。但这个设计利用了“变硬”这件事:手性双稳态结构的快速翻转,其速度与材料模量的平方根成正比。高压导致模量增加,反而提升了驱动性能。这个思路如果推广开来,可能会改变深海软体驱动器的设计范式。
②手性超材料的多功能性
一对镜像的手性单元,既能做摆动驱动(游泳、爬行),又能做压扭转换(夹爪)。文章中展示了压缩-扭转、压缩-剪切两种耦合效应(图5C),用一套简单的几何结构实现了多种变形模式。这种“结构即功能”的思路,比堆砌复杂的机械系统要巧妙得多。
③真正的多模态+变形能力
很多机器人号称“多模态”,其实就是换了套程序。这个机器人是真的在物理形态上变了——胸鳍可以收放,腿和尾鳍共用一套驱动,0.75秒内完成从游到爬的状态切换。这离生物的那种“动态重构”又近了一步。
④系统级的深海验证
从驱动单元、机器人本体到软体夹爪,从高压舱模拟到真实深海测试(1380米、3756米、10666米),整个工作的完成度相当高。图3F的统计对比说明,机器人到了深海并没有“水土不服”,这给后续应用打下了扎实的基础。
⑤软硬结合的工程智慧
软体夹爪可以“穿”在现有刚性机械臂上,不改变原有系统就能增加软抓取能力。这种设计考虑到了实际工程落地的需求——不是推倒重来,而是在现有体系上做加法。
04总结与展望这篇工作让人印象深刻的,不只是“在万米深海动了”这个结果,更是整个设计逻辑的完整性。从材料层面的手性结构设计,到驱动单元的力学分析,再到机器人系统的多模态实现,最后是深海实地验证——每个环节都有扎实的数据支撑。
手性超材料的“压扭耦合”和“双稳态快翻”这两个特性,在深海的极端环境下反而被放大了。这种利用环境、而非对抗环境的设计思路,值得借鉴。
未来研究将聚焦于以下几个方向:
🔸浮力精确调控:现在靠预估密度配重,机器人稍微负浮力,慢慢下沉。如果能做厘米级的可变浮力调节器,就能实现更精确的中性浮力控制。
🔸能耗优化与续航提升:目前约30分钟的续航,对于实际任务来说偏短。需要优化驱动策略(比如调整Strouhal数,现在是0.49,离高效区间0.2-0.4还有距离)和提升电池能量密度。
🔸自主控制与通信:现在主要靠预编程和遥控。要实现真正的自主作业,需要解决深海环境下的实时通信、路径规划、避障等问题。
🔸环境抗干扰能力:海底不是静水,流、涌、地形变化都会影响运动。需要发展自适应控制和抗扰动策略。
🔸多机器人协同:文中最后提了一句“未来可以想象一群这样的机器人协同工作”。如果真能做到集群下海、协同作业,那对深海勘探、测绘、采样将是颠覆性的改变。
🔸更广泛的任务场景:除了生物采样,这类小型软体机器人还能做什么?比如海底考古、管道检测、珊瑚修复……值得探索。
从䲟鱼吸盘到深海机器人,北航团队在软体机器人这条路上走得挺扎实。下一个问题可能是:当一群这样的机器人下海,它们能看到什么?