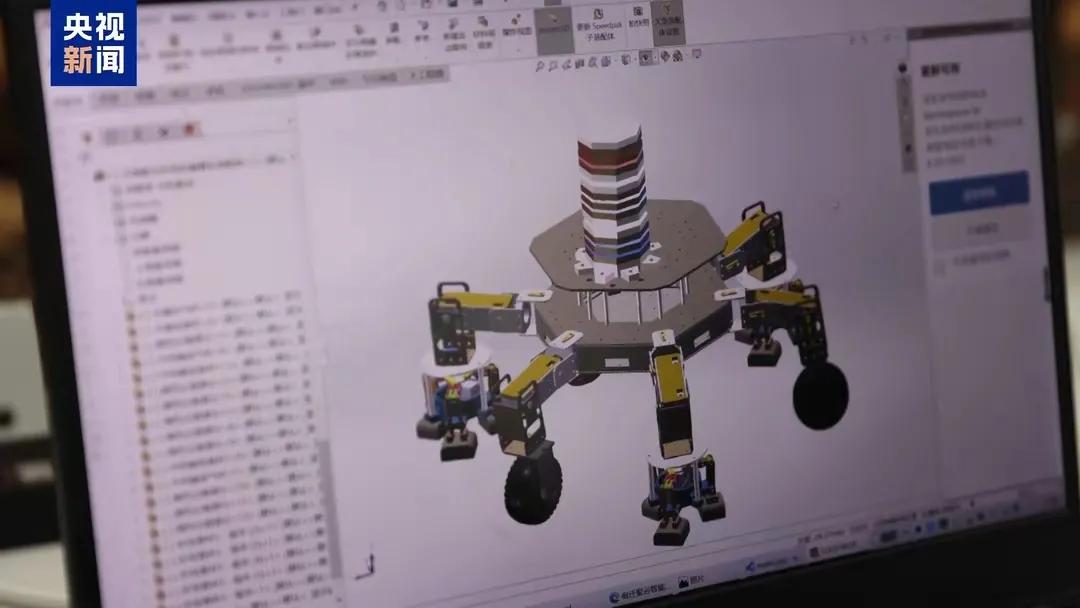
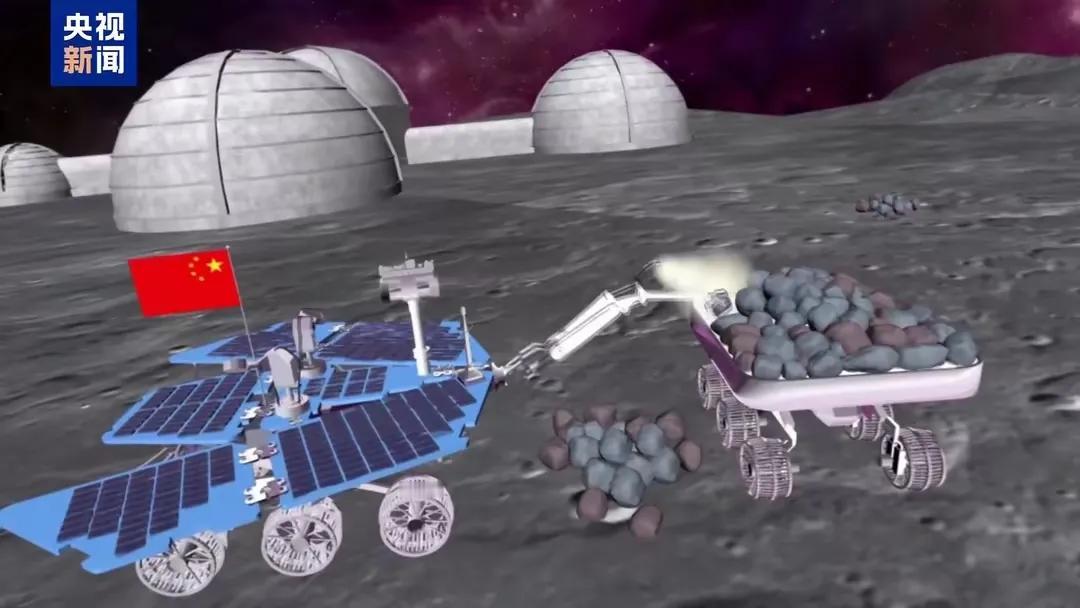
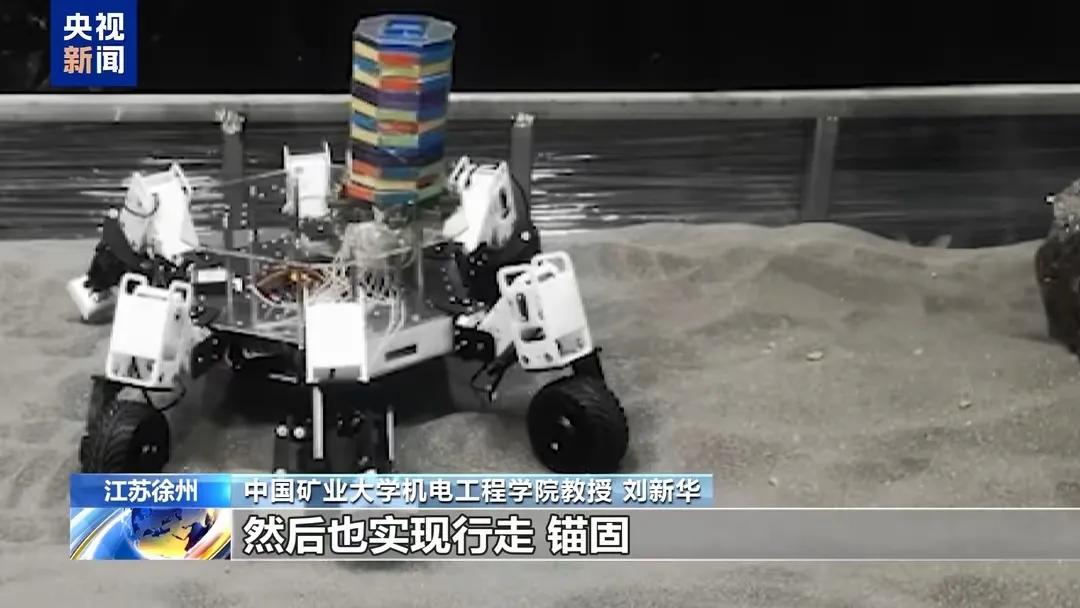
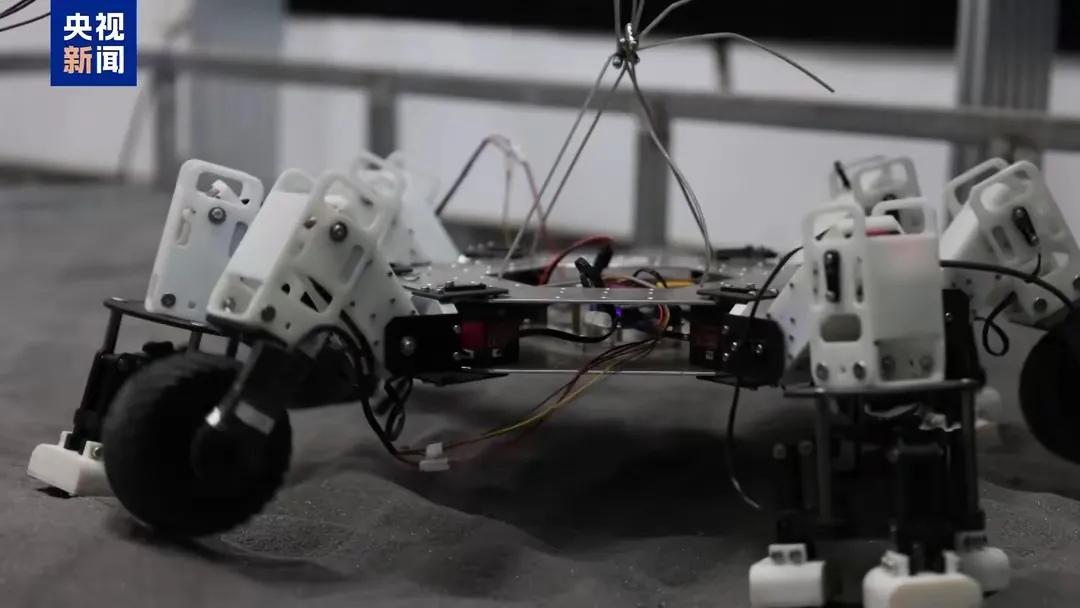
中国矿业大学刘新华教授团队研发的国内首台太空采矿机器人——“星际矿工”近日正式问世,其创新设计与技术突破为太空资源开发提供了重要支持。 机器人采用六足设计(三个轮足和三个爪足),灵感来源于昆虫爪刺结构,通过阵列式爪刺足增强微重力环境下的抓地力,解决传统钻探在低重力环境(如月球、小行星)中的漂移问题。爪刺足能根据地形调整移动模式,同时末端配备车轮与锚固结构,分别适应平滑地形和崎岖岩石环境。主体结构采用新型铝基碳化硅复合材料,车轮基座为钛合金,轮体使用镍基钛记忆合金,兼具高强度、抗辐射和极端温差适应性。差动系统(悬架、离合器、张角调节器)支持机器人动态调整结构形状,适应复杂地形。机器人集成移动、钻探、采样和环境感知模块,未来计划实现“原位开采”——边采集边转化资源(如将开采的冰转化为氢燃料),形成能源自循环系统。 团队通过悬吊系统模拟微重力环境,抵消部分重力并保持垂直拉力恒定,验证机器人在小行星表面的稳定性。此外,中国矿业大学实验室可精准复现月球六分之一重力、真空及极端温度(-250℃至130℃),用于机器人进阶训练。材料选择与结构设计确保机器人可抵御太空辐射和剧烈温差。例如,记忆合金在受力后迅速恢复原状,保障机械部件在极端条件下的可靠性。 月球表面富含氦-3(核聚变燃料)和水冰资源(可制氢供能)。全球已积累80多次月球探测数据,中、美、俄等国计划2030年代建立月球科研站,推动氦-3和水冰的原位利用。已探明1500多颗近地小行星富含稀土、铁、镍、钴等金属,其轨道接近地球,开采可行性较高。例如,部分小行星的金属储量远超地球已探明储量。 除微重力与地形问题外,还需突破太空辐射防护、能源持续供应(如太阳能利用效率)、通信延迟及自主决策等难题。中国计划2028年发射嫦娥八号验证月球资源原位利用技术,2035年建成国际月球科研站。美国科罗拉多矿业学院等高校已开设太空采矿专业,推动学科交叉与人才培养。 “星际矿工”的问世标志着中国在太空采矿技术领域的领先地位,其仿生设计与环境适应性为未来地外资源开发奠定基础。随着技术进步与国际合作深化,人类有望在数十年内实现月球与小行星资源的试验性开采,为可持续发展开辟新路径。