投资界(ID:pedaily2012)5月14日消息,近日,具身智能基础设施供应商「Zenbot(真保科技)」宣布完成近亿元天使轮融资。本轮融资由长盈精密(300115.SZ)、科达利(002850.SZ)、肇民科技(301000.SZ)等精密制造细分领军企业的家族办公室联合领投,L2F光源创业者基金、天狼星资本共同投资。光源资本担任独家财务顾问。
本轮融资资金将主要用于通用具身智能世界模型(WorldModel)的迭代研发、基于第三代半导体GaN驱动的核心关节模组量产扩产、大小脑融合实时通讯架构软硬件方案的全球化推广与客户交付,以及全栈系统设计能力的持续强化与整机级产品的规模化落地。
公司致力于解决具身智能产业化面临的“部件离散-系统割裂-量产困难”三重困境,构建从原子层到智能层的完整技术基础设施,让机器人公司能够以低成本、高可靠的方式获得一站式解决方案。
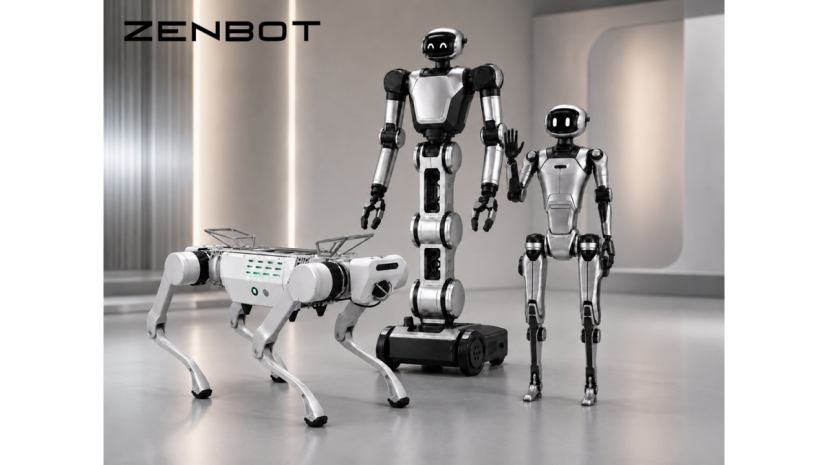
Zenbot依托全栈系统设计能力打造的四足、类人形及人形机器人产品矩阵
在核心部件层率,Zenbot规模化应用第三代半导体GaN(氮化镓)驱动技术,将关节驱动器发热量降至传统MOS方案的30%左右,同时掌握QDD准直驱关节与力控谐波两大关节技术路线。
在通讯架构层,自研大小脑融合的实时通讯架构,确保车规级的实时性、稳定性与安全性。
在智能层,Zenbot打造了「小脑(MPC+RL运动智能)+大脑(世界模型)」的双层架构。其落地成果Phy-Tac是深度融合物理因果推理与触觉感知的世界模型框架,让机器人在执行动作之前先在内部“预演”物理世界的未来状态,实现真正的因果推理与自主决策。
Zenbot联合创始人贾振中博士先后获得清华大学精密仪器系本硕学位与美国密歇根大学博士学位,曾在卡内基梅隆大学(CMU)机器人研究院从事博士后研究,现任南方科技大学机械与能源工程系副研究员、博士生导师,累计发表RSS、ICRA、IROS、T-Mech、TASE、RAL等机器人领域顶会/期刊论文70余篇,入围IEEE-ARM最佳论文奖。
核心团队汇聚GeorgiaTech、香港科大、清华、北大、哈工大、南科大等高校背景。团队成员曾深度参与乐聚机器人、逐际动力等国内机器人公司的核心产品研发,主导了多款四足机器人与人形机器人从零到一的工程化落地。
Zenbot联合创始人贾振中博士表示:“具身智能是通往AGI的必经之路,而世界模型是赋予机器人真正物理理解力的核心引擎。大语言模型让AI学会了‘说’,世界模型将让AI学会‘做’在物理世界中预判、推理、决策。Zenbot的愿景是构建具身智能时代的底层基础设施我们不仅通过世界模型重构机器人的认知边界,更通过底层技术的深度耦合与全栈系统设计,为行业提供从核心部件到整机交付的完整能力闭环。我们相信,真正的壁垒不在单点技术突破,而在于能否将部件、控制、算法、整机串联成一个稳定、高效、可量产的系统。这正是Zenbot最核心的价值。”
光源资本创始人、CEO,L2F光源创业者基金管理合伙人郑烜乐表示:“通用具身智能属于典型的‘愿景层面已形成基本共识,但实现路径尚存高度分歧’的超级赛道,鱼大水大,坡长雪厚。纵观行业周期,L2F认为在赛道破局期,有望诞生未来的世界级‘卖铲子’企业。Zenbot创始团队在核心关节模组、域控制器乃至整机量产方面积累了极为丰富的工程经验;两位教授兼具高水平学术研究能力与扎实的硬件落地能力,是横跨学术界与工业界的稀缺复合型组合。我们很荣幸能在早期阶段深度参与并支持Zenbot,非常期待公司在探索具身智能终局的道路上持续进化!”
光源资本合伙人李昊表示:“在行业高速发展的当下,Zenbot精准卡位新一代机器人的‘生态Tier1’,直击行业‘有大模型、无好底座’的痛点。Zenbot具备业内稀缺的软硬件系统级深度耦合能力,构建了完整的技术底座,衍⽣出四⾜、⼈形、类⼈形等多种机器⼈产品形态,为全球机器⼈公司与场景⽅提供从⼤脑到躯⼲的⼀站式解决⽅案。公司团队拥有顶尖学术能力与量产经验,已快速跑通商业闭环,12个月内斩获近亿级订单。我们十分看好Zenbot接下来的发展,相信公司有机会成为具身智能行业的领军企业!”