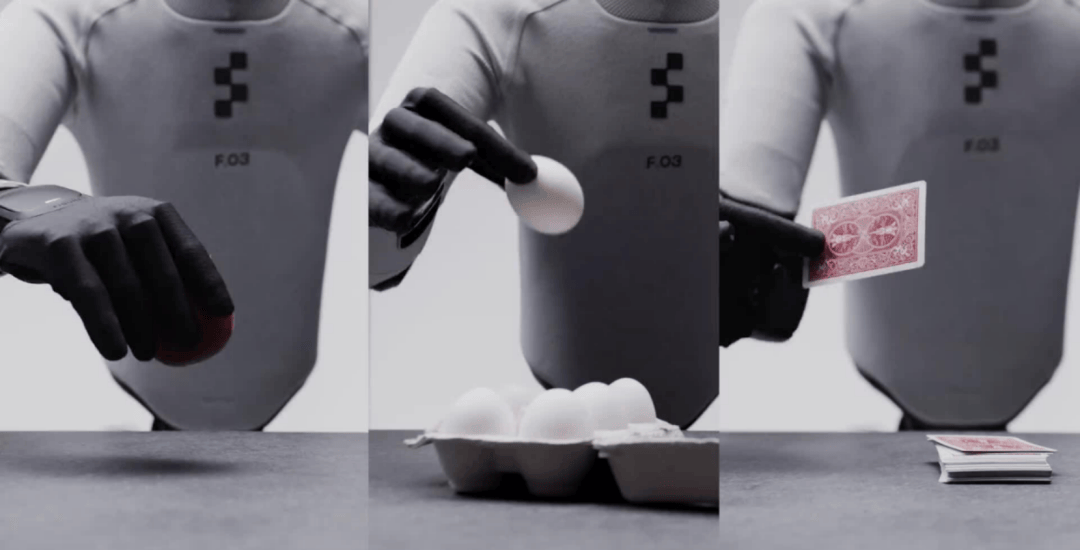
“人形机器人发布”注意到就在不久前Figure发布的Figure 03人形机器人,其手部系统方面进行了全新升级,每个灵巧手均集成了嵌入式掌心摄像头。
该摄像头具备广角视野与低延迟感知能力,能够在抓取过程中为机器人提供富余的近距离视觉反馈,从而实现实时连续的自适应控制。
这种融合了相机与灵巧手的视触觉感知技术,将物理世界的各种参照转化为人形机器人可“读懂”的图像数据,更加接近人手的触觉信息感知维度,打通了人形机器人智能感知的路径。
随着具身智能浪潮袭来,视触觉技术有望成为人形机器人向实用化升级的新标尺。根据国泰海通证券预测,当人形机器人年产量至1亿台,触觉传感器市场或将达到13000亿元,而视触觉技术作为触觉传感的主流技术路线之一,也将实现新突破。
在这条充满前景的赛道上,国际巨头奠定技术根基,中国企业凭借产学研协同实现弯道超车,产业链各环节玩家加速卡位。本文盘点了有望在视触觉技术路线上实现突破的玩家。

▍Gelsight Inc.
视触觉传感(VBTS)的技术火种,由学术实验室孕育而生。2004年东京大学首次提出视觉触觉融合概念,2009年MIT计算机科学与人工智能实验室的Edward Adelson团队则推出了GelSight视触觉传感器,从而开启了机器感知物理世界的新维度。
MIT团队在2011年通过GelSight传感器将其产业化,Edward Adelson教授作为联合创始人创造了同名公司GelSight Inc.。
作为视触觉领域的开创者,GelSight通过弹性体材料和计算机视觉算法实现对物体表面微观结构的精确测量,其核心技术已在机器人操作、工业检测、冰雪竞技等多个领域实现商业化应用。
2022年,GelSight Inc.推出了GelSight Mini机器人触觉传感器,并与Facebook AI Research合作推出了一款触觉传感器DIGIT。
2024年10月,GelSight宣布与Meta AI、Wonik Robotics建立战略合作,联合开发新一代多模态触觉传感器Digit360和仿生机械手Allegro Plexus,并计划2025年量产商业化。

▍帕西尼
帕西尼感知科技成立于2021年,专注与于多维触觉传感技术及人形机器人研发。公司的创始团队来自世界首个人形机器人诞生地——日本早稻田大学机器人实验室,掌握多项触觉传感核心技术。
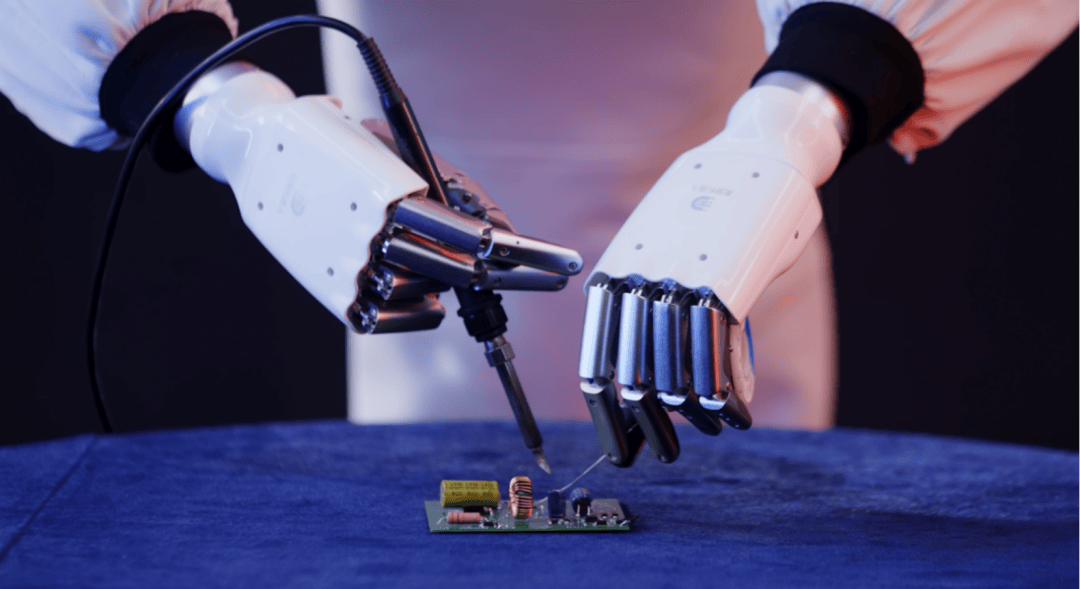
目前,帕西尼已发布了全球首款搭载HAPTA异构多核阵列软硬件架构(Hetero-ArrayProbing Tactile Architecture)的ITPU多维触觉处理单元(Intelligent Tactile Processing Unit)、基于触觉与视觉多模态感知模型和前沿Al算法的人形机器人TORA-ONE以及触觉灵巧手DexH系列等产品。
帕西尼已构建起“传感器-灵巧手-人形机器人”的全栈产品矩阵,其产品线覆盖从“传感器核心零部件”到“人形机器人整机制造”的全链路环节,并已实现批量商业级交付,客户群体涵盖智能制造、康养医疗、工业生产、消费电子等重点领域。
其旗舰产品DexH13灵巧手作为业内首款多维触觉+AI视觉双模态灵巧手堪称技术集大成者:16个自由度的仿生结构设计,搭载1140个多维触觉传感单元,具备15种触觉感知能力,搭配800万像素高清RGB AI手眼相机,实现视触觉双模态感知,指尖力达15N,可轻松抓取5kg重物。
而帕西尼推出的人形机器人能够搭载全线多维触觉灵巧手,实现视触双模态全方位环境感知,将其视触觉技术推向整机验证阶段。

▍戴盟机器人
戴盟机器人成立于2021年,致力于研发高分辨率多模态触觉感知、触觉灵巧手软硬件产品及“以人为中心”的穿戴式遥操作数据采集系统,并通过深度融合通用人工智能和机器人技术,研发含视觉、触觉和语言的操作模型(VTLA),为具身智能、智慧物流、智能制造、智慧服务等领域提供创新性解决方案。
公司孵化于香港科技大学科研团队,在视触觉传感器、多指灵巧手设计与制造、类人行为学习与泛化、含视觉触觉的感知操作大模型等前沿领域深耕多年。团队拥有国际一流的科研成果与技术积累,及全球推广到年营收数十亿的量产经验。
戴盟机器人在视触觉传感器的小型化与高密度上实现了颠覆性突破,目前已推出Sparky 1人形机器人、DM-TacW视触觉传感器及视触觉灵巧手等产品。
以DM-Tac W视触觉传感器为例,该传感器作为多维度触觉引擎,具备高分辨率感知功,能够进行多模态触觉信号测量与智能分析,让夹爪等末端执行器突破传统传感局限,从而精准实现人类触觉的细腻与灵巧,助力复杂场景下的精准操控与自适应交互。
▍纬钛机器人
纬钛机器人成立于2024年,起源于美国麻省理工学院(MIT)计算机科学与人工智能实验室,致力于让机器人拥有像人一样的触觉和灵巧操作的能力,构建全球领先的视触觉和手眼协同平台,打造更加“心灵手巧”的类人智能机器人,引领下一代机器人灵巧操控的范式革命。
创始团队方面,公司创始人李瑞博士毕业于美国麻省理工学院(MIT),师从美国两院院士Edward Adelson教授,发明了全球首款分辨率超越人类手指的视触觉传感器(高达传统方案的上万倍),是视触觉技术路线的开创者和全球引领者,相关成果已多次荣获全球人工智能顶尖会议“最佳论文奖”,并被公认为目前国际最先进的触觉实现方案,已实现量产使用。此外,纬钛机器人的研发人员来自MIT、清华、北大、新加坡国立大学等顶尖院校,拥有20年以上全栈开发经验。

2025年4月,该公司完成近亿元天使及天使+轮融资,由小米旗下瀚星创业投资有限公司领投。2025年6月,纬钛机器人在苏州设立子公司,以此来构建沪苏两地研发制造协同体系。2025年7月,公司于世界人工智能大会展示灵巧手技术并获得国务院总理李强现场指导。2025年8月,公司注册资本由71万元增至95万元,新增厦门微光启创股权投资合伙企业等股东,李瑞接任法定代表人。同在8月,公司获小米集团战略投资,以推动触觉传感器与通用机器人产业化。
视触觉技术方面,纬钛机器人推出的视触觉传感器具备超高分辨率,1平方厘米可达数万触觉信息点;可进行多维力测量,无需单独设置,即可自动判断物体的抓取力;可实现柔性物体操作,并具备抗环境干扰能力。
纬钛机器人凭借全球领先的视触觉传感技术,让机器人具备“心灵手巧”的USB插拔和装配能力,助力机器人实现复杂任务灵巧操纵,能够为精密装配、无损抓取、人机协作等场景提供关键解决方案。
(更多人形机器人赛道深度文章,请关注微信公众号“人形机器人发布”)