13位车企掌舵人齐聚ai大会 Momenta的主题是“可规模化的L4无人驾驶”,这里加上了“可规模化”四个字,针锋相对的就是前面的文远知行,以及小马智行、萝卜快跑等公司。
Momenta对可规模化的定义是:并非指几百辆Robotaxi的示范运营,而是指在全世界各类路况与场景下均能实现真正意义上的L4级自动驾驶。
Momenta给出的目标是“十倍于人类的安全水平”,也就是做到每10亿公里仅发生一次致命事故。考虑到日常实际驾驶中,罕见场景(Corner Cases)大约每100公里就会出现一次,那么要实现十倍安全性,需要积累1000亿公里的训练数据。
从数字上来看,1000亿应该是10亿乘100算出来的,但为啥这俩数可以乘?我一时没想明白。
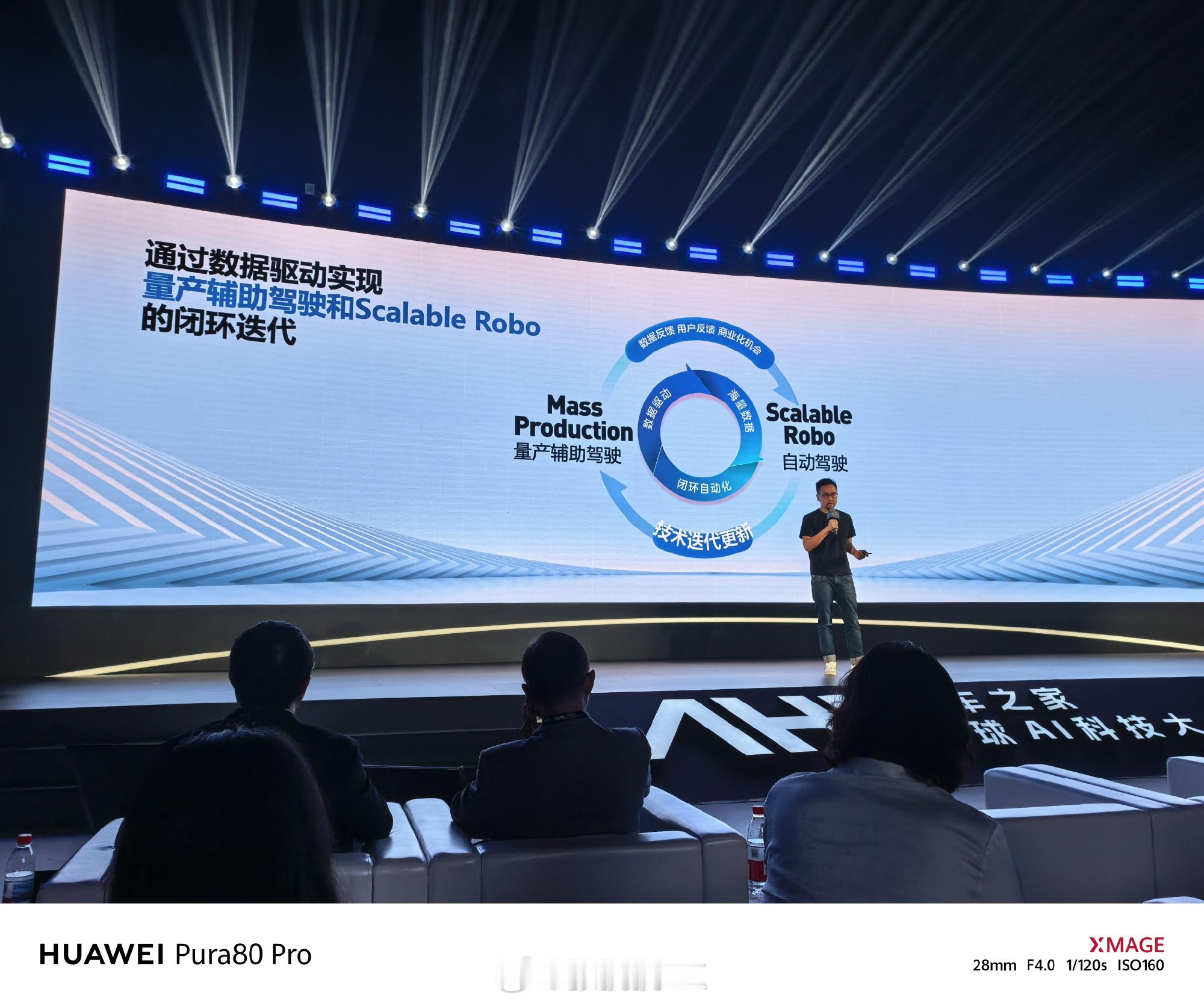
如何实现1000亿公里的数据积累与可规模化L4自动驾驶呢?
Momenta认为:第一,必须依靠数据驱动的算法。第二,必须通过量产车辆采集真实世界数据。仅靠Robotaxi难以满足千亿公里数据需求。
如果这俩真的是必要条件,那么其它的L4无人驾驶公司就很难做到,只有L2和L4两条腿走路的Momenta才能做到。目前,搭载Momenta辅助驾驶的量产车已超40万辆,预计到2028年将实现1000亿公里的数据闭环,从而支持可规模化自动驾驶的实现。
会上Momenta还回顾了自己的技术历程【图4】:从2020年起,我们就坚定推进端到端算法架构。这一路径体现两大趋势:一是规则算法逐步被数据驱动算法取代,二是分散的小模型逐渐融合为统一大模型。
- 2022年,我们的首款量产车型仍基于规则规划与多个专用模型(如红绿灯识别、动态物体检测等),并依赖高精地图。
- 2023年上半年率先应用了基于Transformer的预测模型(FTP),这也是全球第一个用Transformer进行预测的算法。
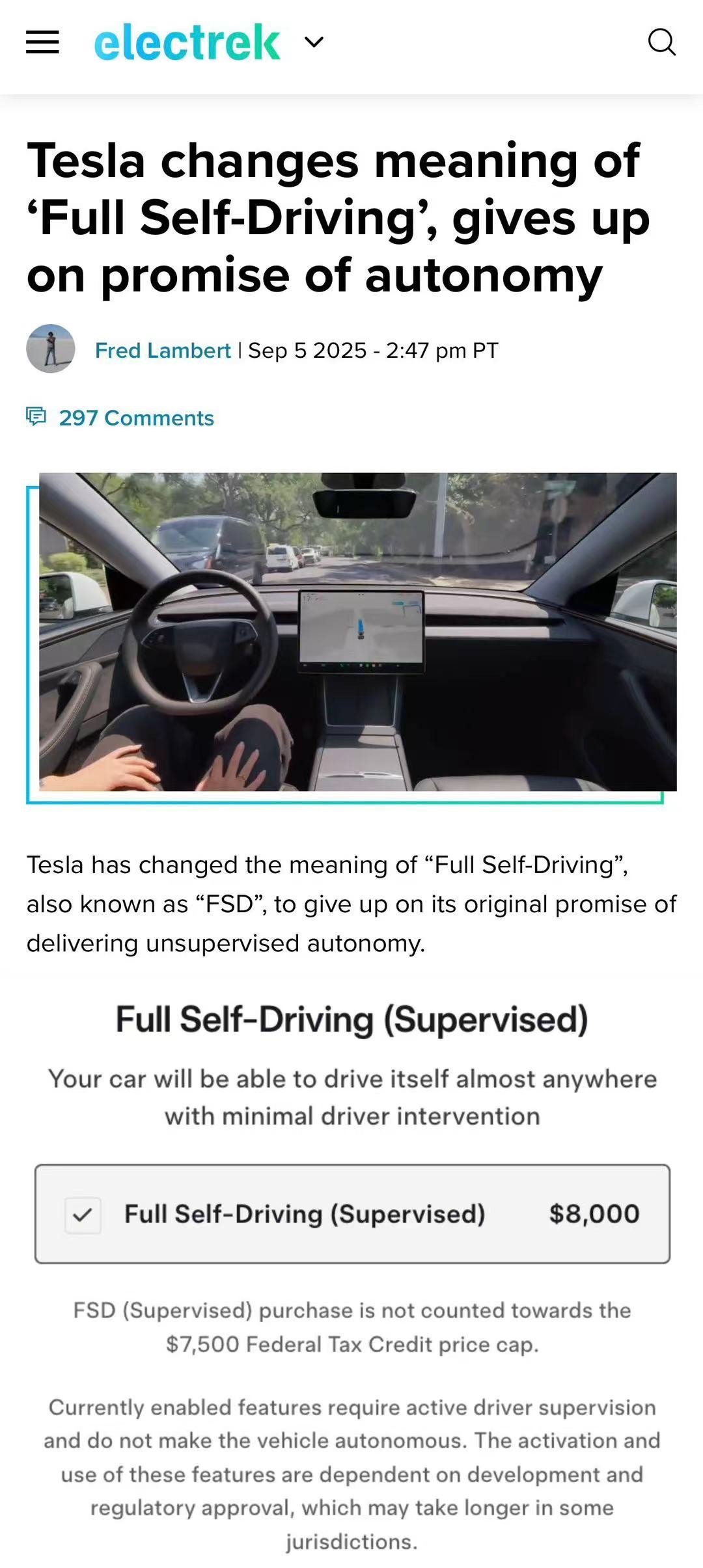
- 2023年下半年实现了感知与规划的两段式端到端,推出基于Transformer的规划算法(DLP)。当时特斯拉FSD V11 仍采用一个基于规则的规划算法。
- 2024年,我们进一步将感知与规划融合为一段式端到端模型,实现从传感器原始信号到规划轨迹的端到端输出。
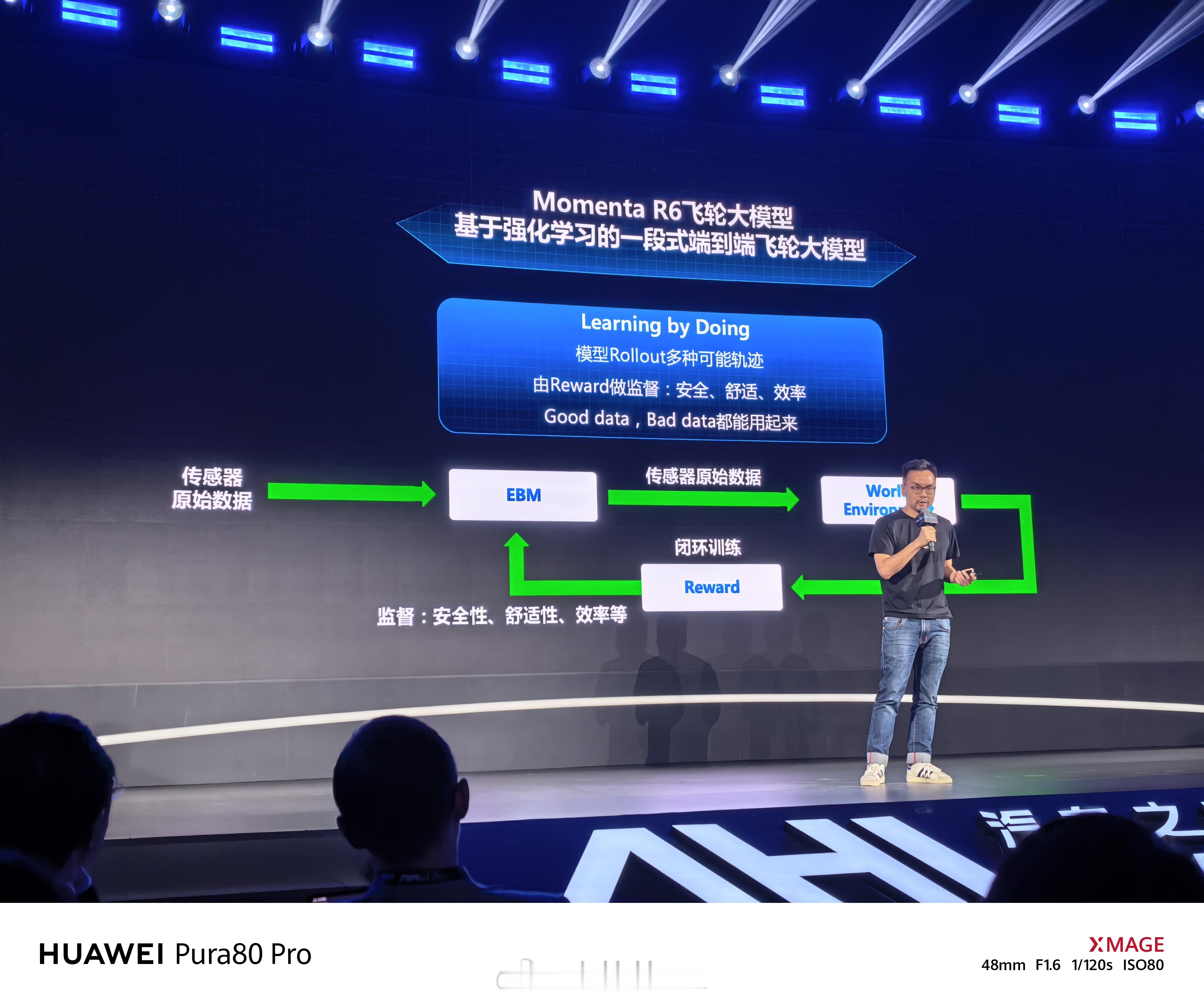
- 2025年,Momenta推出第六代飞轮大模型R6,引入强化学习机制【图5】。正如AlphaGo通过自我博弈实现超越人类最好的棋手,R6通过在云端仿真世界环境中的闭环训练,不断抑制风险行为、强化安全性、舒适性与高效通行能力。
Momenta介绍了R6的三大优势:第一是极致安全安心,第二是丝滑流畅的拟人体验,第三是高效通行。
还介绍了目前的出海进展:2025年9月的IAA慕尼黑车展期间,我们在慕尼黑城区内环复杂路段共完成228次测试,实现零接管的效果,获合作伙伴的一致高度评价。基于R6飞轮大模型的强大泛化能力,我们仅用三个月就完成在日本市场的初步适配。
最后提出了一个“智驾摩尔定律”【图6】:软件体验每两年提升十倍,硬件成本每两年下降一半。具体来说:
- 2022年,一套城市NOA硬件成本超2万元
- 2024年行业方案趋于收敛,成本降至8000-10000元。
- 预计2026年以后,一套高性价比城市NOA方案成本将进一步降至4000-5000元,这将推动智能辅助驾驶走进千家万户。Momenta